1.本发明涉及多种水域漂浮垃圾的无人回收与储存等技术领域,尤其涉及一种 垃圾回收与储存无人船的结构设计及其使用方法。
背景技术:
2.针对原有水域漂浮垃圾的回收与储存方式过于繁琐且效率不高,本发明提出 一种垃圾回收与储存无人船的结构设计及其使用方法,可以有效解决水域出现垃 圾等对水质造成污染的问题。
技术实现要素:
3.本发明提出一种垃圾回收与储存无人船的结构设计及其使用方法,以减少水 域存在大量漂浮垃圾对水质造成污染。
4.为达到上述目的,本发明提出一种垃圾回收与储存无人船的结构设计及其使 用方法,包括:
5.浮力模块,由四根前端接有双通的pp管组成,所述pp管位于船的最底部, 其作用主要用于提供船只所需浮力,除此外,中间两根较长pp管母线中点位置可 绕上部船舱左右两边的旋转平台以垂直与水面方向为轴心作旋转运动,所述两根 前端接有双通的pp管的最大张角为40度,由此可提供与漂浮垃圾更大的接触初 面积,以达到更大范围的垃圾回收与聚拢;
6.回收调节张角控制模块,由一个电动液压推杆,两个相等圆柱齿轮,两个相 等勾挂圆柱齿轮,一个对称双齿条机构,左右两个带滑轨槽的翼板,所述模块整 体位于上述浮力模块上部,具体的,所述模块整体安装于浮动模块上部的型材组 架上,所述电动液压推杆尾部与型材组架固联,上述浮动模块与回收调节张角控 制模块通过固定在浮力模块两根较短前端接有双通的pp管后部的卡箍相连接,所 述模块的电动液压推杆可进行前后调节,所述电动液压推杆推动所述对称双齿条 机构的前后线性运动,所述对称双齿条机构与所述两个相等圆柱齿轮分别作相对 运动,所述两个相等圆柱齿轮与所述两个相等勾挂圆柱齿轮作相对运动,所述勾 挂圆柱齿轮尖端与上述卡箍通过所述翼板上滑轨槽相连接,从而提供扭转力带动 所述两根较长的pp管的旋转运动调节张角以满足回收漂浮垃圾所需角度;
7.动力及转向模块,由两个方向舵机,两个动力电机,两个螺旋桨,两个转盘 支架组成左右两组动力及转向模块;其单个转盘支架由四根铜柱,一个方向舵机 支座,一个动力电机支座组成;其单个动力及转向模块的组成为一个转盘支架, 固定于浮力模块中两根较短的pp管的末端,一个方向舵机,固定在所述转盘支架 的方向舵机支座上方与转盘支架的上部相连接,一个动力电机,固定在所述转盘 支架的动力电机支座上,一个螺旋桨,安装在所述动力电机上,用于提供动力;
8.回收传送控制模块,由一个带间隔挡板的传送带,一个减速电机,两侧传送 带挡
板,两个托辊,一个电动液压推杆组成,所述挡板安装于所述传送带两侧且 两挡板平行并在投影面重合,下部接有电动液压推杆,所述电动液压推杆尾部与 所述回收调节张角控制模块固定在同一型材组架上,另一端与所述两挡板铰链连 接,可对传送带整体进行俯仰角度调节,所述两托辊分别安装于两挡板对侧并于 船舱底部型材上的法兰支座连接,所述减速电机安装于船舱底部型材上,其与托 辊通过皮带传动方式进行连接,提供托辊转动带动皮带运动的动力源;
9.回收储存模块,由两个左右相同侧板,一个固定前端板,一个移动推板,一 个底板,一个可开关后端板,两个梯形丝杠,两个丝杠固定转动座,两个丝杠固 定轴承法兰座,一个减速电机,一个传动皮带组成,所述底板安装于上述型材组 架上部,位于所述回收传送控制模块后部,所述底板下部与上述型材组架通过轴 承连接,所述固定前端板固定安装在上述型材组架上,所述减速电机安装于固定 前端板中心靠内一侧,其上安装有上述传动皮带,皮带对称两端接有丝杠固定转 动座,所述左右两相同侧板装于上述底板上,两侧板对称位置上分别装有丝杠固 定轴承法兰座,所述移动推板安装于上述固定前端板平行且投影重合的位置,其 上部分与船舱底部型材接触,其与型材之间通过x、y轴双向轴承连接,所述两个 梯形丝杠以一个梯形丝杠与上述单侧丝杠固定转动座和丝杠固定轴承法兰座为一 组进行安装,共两组,其上梯形螺母可在丝杠内进行直线运动从而带动上述移动 推板的前后移动,所述可开关后端板与上述两侧板进行铰链连接,通过铰链运动 可升起或降下后端板,从而使垃圾倾泻;
10.电路能源组与视觉传导模块,由一个电路能源安装船舱,各类电路单元若干, 一个360度摄像头,一个视觉传感器组成,其中,所述电路能源安装船舱固定在 上述回收传送控制模块上部,船舱内部放置上述各类电路电池单元若干,所述摄 像头与所述视觉传感器相连接提供机器视觉范围内垃圾的具体方位从而进行下一 步的运行指令;
11.动力源模块,由若干储存电池,三块太阳能板,一个减速电机,两个齿轮连 杆组组成,其具体位置为,所述若干储存电池位于上述船舱内部,所述三块太阳 能板安装于上述船舱顶部,一个减速电机安装于上述船舱上部侧面,两个齿轮连 杆组中齿轮与所述减速电机连接,所述齿轮连杆组中连杆与太阳能板连接,所述 减速电机转动带动齿轮连杆组运动,从而使三块太阳能板展开进行储能。
附图说明
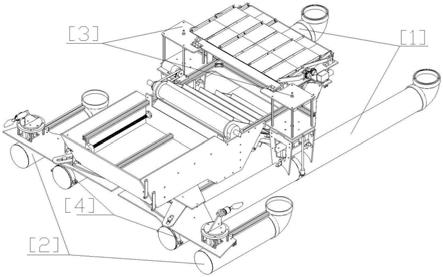
12.图1介绍本发明提出一种垃圾回收与储存无人船的结构设计及其使用方法中 浮力模块的具体结构;
13.图2介绍本发明提出一种垃圾回收与储存无人船的结构设计及其使用方法中 回收调节张角控制模块的具体结构及其工作原理示意图;
14.图3介绍本发明提出一种垃圾回收与储存无人船的结构设计及其使用方法中 动力及转向模块的具体结构及其工作原理示意图;
15.图4介绍本发明提出一种垃圾回收与储存无人船的结构设计及其使用方法中 回收传送控制模块的具体结构及其工作原理示意图;
16.图5介绍本发明提出一种垃圾回收与储存无人船的结构设计及其使用方法中 回收储存模块的具体结构及其工作原理示意图;
17.图6介绍本发明提出一种垃圾回收与储存无人船的结构设计及其使用方法中 电路能源组与视觉传导模块的具体结构及其工作原理示意图;
18.图7介绍本发明提出一种垃圾回收与储存无人船的结构设计及其使用方法中 动力源模块的具体结构及其工作原理示意图。
19.附图标记说明:[1]浮动模块中两根较长前端接有双通的pp管、[2]浮动模块 中两根较短前端接有双通的pp管、[3]电路能源组与视觉传导模块中船舱左右两边 的旋转平台、[4]卡箍、[5]型材组架、[6]回收调节张角控制模块中的电动液压推 杆、[7]回收调节张角控制模块中两个相等圆柱齿轮、[8]回收调节张角控制模块 中两个相等勾挂圆柱齿轮、[9]回收调节张角控制模块中一个对称双齿条机构、[10] 回收调节张角控制模块中左右两个带滑轨槽的翼板、[11]动力及转向模块中的方 向舵机、[12]动力及转向模块中的动力电机、[13]动力及转向模块中的螺旋桨、[14]动力及转向模块中的转盘支架、[15]回收传送控制模块中的带间隔挡板的传 送带、[16]回收传送控制模块中的减速电机、[17]回收传送控制模块中的两侧传 送带挡板、[18]回收传送控制模块中的两个托辊、[19]回收传送控制模块中的电 动液压推杆、[20]法兰支座、[21]回收储存模块中的两侧板、[22]回收储存模块 中的固定前端板、[23]回收储存模块中的移动推板、[24]回收储存模块中的底板、 [25]回收储存模块中的可开关后端板、[26]回收储存模块中的两个梯形丝杠、[27] 回收储存模块中的两个丝杠固定转动座、[28]回收储存模块中的两个丝杠固定轴 承法兰座、[29]回收储存模块中的减速电机、[30]回收储存模块中的传动皮带、 [31]电路能源组与视觉传导模块中的船舱、[32]电路能源组与视觉传导模块中的 360度摄像头、[33]电路能源组与视觉传导模块中的视觉传感器、[34]动力源模块 中的三块太阳能板、[35]动力源模块中的减速电机、[36]动力源模块中的两个齿 轮连杆组。
[0020]
具体实施办法
[0021]
下面结合附图对本发明实施例及方法进行详细描述。
[0022]
其中,
[0023]
图1介绍本发明提出一种垃圾回收与储存无人船的结构设计及其使用方法中 浮力模块的具体结构。如图1所示
[0024]
具体地,四根前端接有双通的pp管[1、2]用于提供整船浮力,中间浮动模块 中两根较长前端接有双通的pp管[1]母线中点位置受到回收调节张角控制模块的 牵引作用绕电路能源组与视觉传导模块中船舱左右两边的旋转平台[3]以垂直与 水面方向为轴心作旋转运动,所述浮动模块中两根较长前端接有双通的pp管的最 大张角为40度,根据不同的工况,所需张角调节,由此可提供与漂浮垃圾更为适 宜的接触初面积,以达到最合理范围的垃圾回收与聚拢;另,上述回收调节张角 控制模块将在下文中详细介绍;
[0025]
图2介绍本发明提出一种垃圾回收与储存无人船的结构设计及其使用方法中 回收调节张角控制模块的具体结构及其工作原理示意图。如图2所示
[0026]
具体地,回收调节张角控制模块中的电动液压推杆[6]所的尾部与型材组架[5] 固联,所述型材组架[5]位于浮动模块与回收调节张角控制模块中间,起支撑和固 定作用,浮动模块与回收调节张角控制模块通过固定在浮力模块两根较短前端接 有双通的pp管后部的卡箍[4]相连接,工作状态下,回收调节张角控制模块的电 动液压推杆[6]可进行前后调节,所述电动液压推杆[6]推动[8]回收调节张角控制 模块中一个对称双齿条机构[9]的
前后线性运动,所述对称双齿条机构[9]与回收 调节张角控制模块中两个相等圆柱齿轮[7]分别作相对运动,所述两个相等圆柱齿 轮[7]与回收调节张角控制模块中两个相等勾挂圆柱齿轮[8]作相对运动,所述勾 挂圆柱齿轮[8]尖端与上述卡箍[4]通过回收调节张角控制模块中左右两个带滑轨 槽的翼板[10]上的滑轨槽相连接,从而提供扭转力带动所述两根较长的pp管[1] 的旋转运动调节张角以满足工况;
[0027]
图3介绍本发明提出一种垃圾回收与储存无人船的结构设计及其使用方法中 动力及转向模块的具体结构及其工作原理示意图。如图3所示
[0028]
具体地,动力及转向模块中的转盘支架[14]其单个转盘支架由四根铜柱,一 个方向舵机支座,一个动力电机支座组成;其单个动力及转向模块的组成为一个 转盘支架[14],固定于浮力模块中两根较短的pp管[2]的末端,动力及转向模块 中的方向舵机[11]固定在所述转盘支架[14]的方向舵机支座上方与转盘支架[14] 的上部相连接,动力及转向模块中的动力电机[12]固定在所述转盘支架[14]的动 力电机支座上,动力及转向模块中的螺旋桨[13]安装在所述动力电机[12]上,用 于提供动力;
[0029]
图4介绍本发明提出一种垃圾回收与储存无人船的结构设计及其使用方法中 回收传送控制模块的具体结构及其工作原理示意图。如图4所示
[0030]
具体地,回收传送控制模块中的两侧传送带挡板[17]安装于回收传送控制模 块中的带间隔挡板的传送带[15]两侧且两挡板[17]平行并在投影面重合,下部接 有回收传送控制模块中的电动液压推杆[19],所述电动液压推杆[19]尾部与上述 回收调节张角控制模块固定在同一型材组架[5]上,另一端与所述两挡板[17]铰链 连接,可对传送带[15]整体进行俯仰角度调节,回收传送控制模块中的两个托辊 [18]分别安装于两挡板[17]对侧,其中一侧与船舱底部型材组架[5]上的法兰支座 [20]连接,回收传送控制模块中的减速电机[16]安装于船舱底部型材组架[5]上, 其与托辊[18]通过皮带传动方式进行连接,提供托辊转动的扭转力从而带动皮带 运动的动力源;
[0031]
图5介绍本发明提出一种垃圾回收与储存无人船的结构设计及其使用方法中 回收储存模块的具体结构及其工作原理示意图。如图5所示
[0032]
具体地,该模块整体位于上述回收传送控制模块后部,回收储存模块中的底 板[24]安装于上述型材组架[5]上部,所述底板[24]下部与上述型材组架[5]通过 轴承连接,回收储存模块中的固定前端板[22]固定安装在上述型材组架[5]上,回 收储存模块中的减速电机[29]安装于固定前端板中心靠内一侧,其上安装有回收 储存模块中的传动皮带[30],皮带[30]对称两端接有回收储存模块中的两个丝杠 固定转动座[27],回收储存模块中的两侧板[21]装于上述底板[24]上,两侧板[21] 对称位置上分别装有回收储存模块中的两个丝杠固定轴承法兰座[28],回收储存 模块中的移动推板[23]安装于上述固定前端板[22]平行且投影重合的位置,其上 部分与船舱底部型材[5]接触,其与型材组架[5]之间通过x、y轴双向轴承连接, 回收储存模块中的两个梯形丝杠[26]以一个梯形丝杠与上述单侧丝杠固定转动座 [27]和丝杠固定轴承法兰座[28]为一组进行安装,共两组,其上梯形螺母可在丝 杠[26]内进行直线运动从而带动上述移动推板[23]的前后移动,回收储存模块中 的可开关后端板[25]与上述两侧板[21]进行铰链连接,通过铰链运动可升起或降 下后端板[25],从而使垃圾倾泻;
[0033]
图6介绍本发明提出一种垃圾回收与储存无人船的结构设计及其使用方法中 电
路能源组与视觉传导模块的具体结构及其工作原理示意图。如图6所示
[0034]
具体地,电路能源组与视觉传导模块中的船舱[31]固定在上述回收传送控制 模块上部,船舱[31]内部放置上述各类电路电池单元若干,电路能源组与视觉传 导模块中的360度摄像头[32]与电路能源组与视觉传导模块中的视觉传感器[33] 相连接提供机器视觉范围内垃圾的具体方位从而进行下一步的运行指令;
[0035]
图7介绍本发明提出一种垃圾回收与储存无人船的结构设计及其使用方法中 动力源模块的具体结构及其工作原理示意图。如图7所示
[0036]
具体地,上述若干储存电池位于上述船舱[31]内部,动力源模块中的三块太 阳能板[34]安装于上述船舱[31]顶部,动力源模块中的减速电机[35]安装于上述 船舱[31]上部侧面,动力源模块中的两个齿轮连杆组[36]中齿轮与所述减速电机 [35]连接,所述齿轮连杆组[36]中连杆与太阳能板[34]连接,所述减速电机[35] 转动带动齿轮连杆组[36]运动,从而使三块太阳能板[34]展开进行储能。
[0037]
本发明提出一种垃圾回收与储存无人船的结构设计及其使用方法,针对水域 漂浮垃圾打捞的特性,结合机械原理和各类电气元件特性,设计开发一种垃圾回 收与储存无人船的结构,并给出其工作办法以减少水域存在大量漂浮垃圾对水质 造成污染,为生态环境治理和保护起到了一定正向作用。
[0038]
本领域普通技术人员可以理解:实现上述各各工作原理的全部或部分步骤可 以通过电路控制等相关的硬件、软件来完成。前述的程序可以存储于一计算机可 读取存储介质中。该程序在执行时,执行包括上述各工作原理的步骤。
[0039]
最后应说明的是:以上各实工作原理仅用以说明本发明的技术方案,而非对 其限制;尽管参照前述各工作原理对本发明进行了详细的说明,本领域的普通技 术人员应当理解:其依然可以对前述各工作原理所记载的技术方案进行修改,或 者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相 应技术方案的本质脱离本发明各实施例技术方案的范围。