一种新型水下负压
‑
电磁吸附清洗机器人
技术领域
1.本实用新型涉及水下船舶清洗领域,具体涉及一种新型水下负压
‑
电磁吸附清洗机器人。
背景技术:
2.船舶长时间工作在海洋环境下,会遭受到海水腐蚀以及海底海洋生物的附着。船体表面常常会附着难以清除的海洋生物。出现上述状况后船舶的行驶速度会显著地下降,油耗明显增多,使得船舶的运输成本提高。
3.目前市场上船体表面清刷主要有坞内清刷和水下清刷,坞内清刷易增加船舶的停航损失,造成环境污染,而人工水下清刷则费时费力并且具有较高的风险。
技术实现要素:
4.本实用新型的目的在于提供一种新型水下负压
‑
电磁吸附清洗机器人,以解决上述背景技术中提出的问题。
5.一种新型水下负压
‑
电磁吸附清洗机器人,包括基板、转动机构一、转动板、空化射流喷头、抽气管、转动机构二、移动机构和电磁吸附块,所述基板上阵列开有通孔一,基板中心部位开有通孔二,基板表面还阵列设置有四个滑槽和四个挡板,所述转动机构一设置在基板两侧,所述转动板连接在两转动机构一之间,所述空化射流喷头阵列设置在安装板上并与输送空化射流的管道相连,所述抽气管转动连接在通孔二中,抽气管的端部设有喇叭状柔性圈,所述抽气管与抽气泵相连,所述转动机构二连接在抽气管和基板之间,所述移动机构滑动安装在滑槽中,所述电磁吸附块连接在移动机构上,所述电磁吸附块为空心立方体结构,其内部空腔中设置有电磁线圈。
6.优选的,所述转动机构一包括电机一、锥齿轮一和转动块,所述电机一连接在基板的侧面上,所述锥齿轮一连接在电机一的输出轴上,所述转动块转动连接在基板侧面并与转动板相连,所述转动块上设置有锥形齿面,所述锥齿轮一和锥形齿面相互啮合。
7.优选的,所述转动机构二包括电机二、锥齿轮二和锥齿轮三,所述电机二连接在基板上,所述锥齿轮二连接在电机二的输出轴上,所述锥齿轮三连接在抽气管上,所述锥齿轮二和锥齿轮三相互啮合。
8.优选的,所述移动机构包括滑块、电动伸缩杆一和电动伸缩杆二,所述滑块滑动连接在滑槽中,所述滑块的一端开有凹槽,所述电动伸缩杆一固定在凹槽中,电动伸缩杆一的活动端与电磁吸附块相连,所述电动伸缩杆二连接在挡板和滑块之间。
9.本实用新型的优点在于:无需让船舶进入船坞,提高船舶利用率,大大节省了入坞的清洗费用,避免了传统清刷技术的污染问题;克服了水下人工清刷速度慢、劳动强度大和风险高等问题;采用四条独立的运动机构控制电磁吸附块运动,能够根据船舶表面的形状来进行调整,从而使得机器人能够很好的贴合在船体表面,不容易脱落。
附图说明
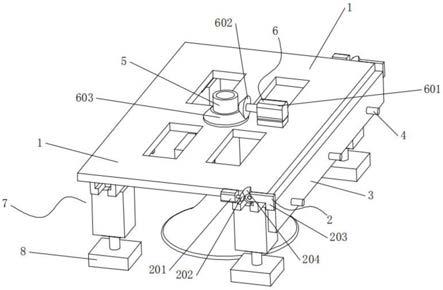
10.图1、图2为本实用新型不同角度的结构示意图,
11.图3为本实用新型中基板的结构示意图,
12.图4为本实用新型中电磁吸附块的结构示意图,
13.图5为本实用新型中滑块的结构示意图,
14.图中:1
‑
基板,101
‑
通孔一,102
‑
通孔二,103
‑
滑槽,104
‑
挡板,2
‑
转动机构一,201
‑
电机一,202
‑
锥齿轮一,203
‑
转动块,204
‑
锥形齿面,3
‑
转动板,4
‑
空化射流喷头,5
‑
抽气管,6
‑
转动机构二,601
‑
电机二,602
‑
锥齿轮二、603
‑
锥齿轮三,7
‑
移动机构,701
‑
滑块,702
‑
电动伸缩杆一,703
‑
电动伸缩杆二,704
‑
凹槽,8
‑
电磁吸附块,801
‑
电磁线圈。
具体实施方式
15.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
16.如图1至图5所示,一种新型水下负压
‑
电磁吸附清洗机器人,包括基板1、转动机构一2、转动板3、空化射流喷头4、抽气管5、转动机构二6、移动机构7和电磁吸附块8,所述基板1上阵列开有通孔一101,基板1中心部位开有通孔二102,基板1表面还阵列设置有四个滑槽103和四个挡板104,所述转动机构一2设置在基板1两侧,所述转动板3连接在两转动机构一2之间,所述空化射流喷头4阵列设置在安装板3上并与输送空化射流的管道相连,所述抽气管5转动连接在通孔二102中,抽气管5的端部设有喇叭状柔性圈501,所述抽气管5与抽气泵相连,所述转动机构二6连接在抽气管5和基板1之间,所述移动机构7滑动安装在滑槽103中,所述电磁吸附块8连接在移动机构7上,所述电磁吸附块为8空心立方体结构,其内部空腔中设置有电磁线圈801。
17.在本实施例中,所述通孔一101的存在大大降低了机器人的自重,减小了机器人吸附所需的力量。
18.在本实施例中,所述空化射流喷头4设置在机器人的一侧,可以避免机器人的吸附结构吸附到船体表面的海洋生物上而导致机器人脱落。
19.在本实施例中,所述电磁吸附块8的底部可以添加一层柔性层,使得电磁吸附块8能够与船体外表面更加贴合。
20.在本实施例中,所述柔性圈501呈喇叭状更有利于和船体表面的贴合,从而保证抽气管5内部负压环境的稳定。
21.在本实施例中,所述转动机构一2包括电机一201、锥齿轮一202和转动块203,所述电机一201连接在基板1的侧面上,所述锥齿轮一202连接在电机一201的输出轴上,所述转动块203转动连接在基板1侧面并与转动板3相连,所述转动块203上设置有锥形齿面204,所述锥齿轮一202和锥形齿面204相互啮合。
22.在本实施例中,所述转动机构二6包括电机二601、锥齿轮二602和锥齿轮三603,所述电机二601连接在基板1上,所述锥齿轮二602连接在电机二601的输出轴上,所述锥齿轮三603连接在抽气管5上,所述锥齿轮二602和锥齿轮三603相互啮合。
23.在本实施例中,所述移动机构7包括滑块701、电动伸缩杆一702和电动伸缩杆二703,所述滑块701滑动连接在滑槽103中,所述滑块701的一端开有凹槽704,所述电动伸缩杆一702固定在凹槽704中,电动伸缩杆一702的活动端与电磁吸附块8相连,所述电动伸缩杆二703连接在挡板104和滑块701之间。
24.工作原理及过程:给电磁线圈801通电产生磁力,将机器人安装到船体表面,需要机器人移动时控制电动伸缩杆二703缩回,直至柔性圈501紧贴船体表面,先向排气管中5鼓气,将排气管5中的海水赶出,再从排气管5中抽气创造负压环境,此时给电磁线圈801断电,通过海水对柔性圈501的压力将机器人固定在船体表面,接着缩回电动伸缩杆二703,再启动电动伸缩杆一702移动电磁吸附块8,移动完成后在伸出电动伸缩杆二703至电磁吸附块8紧贴在船体表面,此时再给电磁线圈801通电产生磁力将电磁吸附块8固定,此时消除排气管5中的负压,继续伸长电动伸缩杆二703后伸长电动伸缩杆一702完成基板1的移动;需要机器人转动时,可以在单独负压吸附时,启动电机二601,使基板1围绕排气管5进行转动,到达工作区域后,控制空化射流从空化射流喷头4中喷出,并可以通过电机一201来控制空化射流的方向。
25.由技术常识可知,本实用新型可以通过其它的不脱离其精神实质或必要特征的实施方案来实现。因此,上述公开的实施方案,就各方面而言,都只是举例说明,并不是仅有的。所有在本实用新型范围内或在等同于本实用新型的范围内的改变均被本实用新型包含。