1.本发明属于水下机器人领域,特别是涉及一种交叉结构的多自由度水下压电机器人。
背景技术:
2.随着陆地资源开发利用的形势日益严峻,尤其是中国的陆地资源人均值较低,对海洋资源的探索变得越来越重要。深海领域有着极其丰富多样的自然资源和广阔的作业空间以及其蕴育的政治价值、经济价值、军事价值和生态价值,成为二十一世纪人类主要进军的科研探索的高地。水下机器人能够携带机械臂和电子产品,完成水下资源的探测和取样、水下的远程操控和军事上的侦察、进攻和防守等作业任务。
3.现在常见的水下机器人包括刚体机器人和软体机器人。刚体机器人常采用螺旋桨驱动,技术成相对熟,具有动力强劲,潜行速度块的优势,但是在推进时由于螺旋桨旋转产生较大噪声和扰动气泡,不利于深海的生态环境且隐蔽性较差;另外,传统螺旋桨式的需要抗压外壳,外壳容易破坏,不易小型化。软体机器人具有更好的环境结构适应性,其驱动方式主要取决于所使用的智能材料;一般有介电弹性体(de)、形状记忆合金(sma)、形状记忆聚合物(smp)等。软体机器人的运动往往是二维平面的,且造价相对昂贵。
技术实现要素:
4.本发明为了解决现有技术中的问题,提出一种交叉结构的多自由度水下压电机器人。
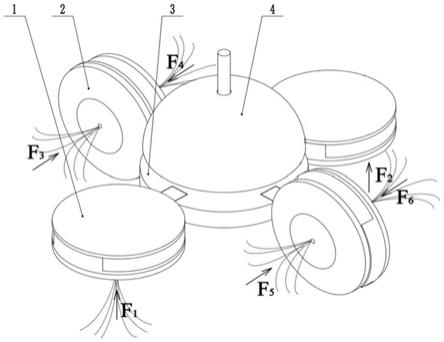
5.为实现上述目的,本发明采用以下技术方案:一种交叉结构的多自由度水下压电机器人,它包括竖直浮潜驱动模块、水平运动驱动模块、中间连接体和浮力调整装置,所述竖直浮潜驱动模块和水平运动驱动模块数量均为n个,n为大于等于2的正整数,所述竖直浮潜驱动模块和水平运动驱动模块上均设有压电振子和射流喷水口,所述中间连接体外围设置有n个连接口,所述竖直浮潜驱动模块和水平运动驱动模块与中间连接体上的连接口一一对应,固定安装于中间连接体的外围,构成交叉结构型,所述浮力调整装置与中间连接体紧固连接,通过改变加装浮力块的体积,控制水下压电机器人的初始浮沉状态。
6.更进一步的,所述竖直浮潜驱动模块数量为n个,n为大于等于2的正整数,每个竖直浮潜驱动模块均包括上仓、第一中间组件、第一压电振子和浮潜驱动壳盖,所述第一压电振子包括固连的第一压电陶瓷和第一振动膜片,所述上仓与浮潜驱动壳盖固定连接在第一中间组件的两侧,所述第一压电振子通过非连接件连接方式固定安装在第一中间组件与浮潜驱动壳盖之间。
7.更进一步的,所述水平运动驱动模块数量为n个,n为大于等于2的正整数,每个水平运动驱动模块均包括运动驱动前壳盖、第二压电振子、第二中间组件、第三压电振子和运动驱动后壳盖,所述第二压电振子包括固连的第二压电陶瓷和第二振动膜片,所述第三压电振子包括固连的第三压电陶瓷和第三振动膜片,所述运动驱动前壳盖和运动驱动后壳盖
固定连接在第二中间组件的两侧,所述第二压电振子固定安装在运动驱动前壳盖与第二中间组件之间,所述第三压电振子固定安装在第二中间组件与运动驱动后壳盖之间。
8.更进一步的,所述竖直浮潜驱动模块和水平运动驱动模块的壳盖均为流线型外形,表面任意位置均可开设通孔,内腔为锥状收敛形结构。
9.更进一步的,所述浮力调整装置固定安装在中间连接体的轴线上方,浮力调整装置添加不同体积的浮力块并进行固定连接,从而调节水下压电机器人整体的浮力。
10.更进一步的,所述浮力调整装置包括连接杆、支撑件、中间圆形连接体和螺母,所述连接杆的底端与中间连接体通过支撑件紧固连接,上端与中间圆形连接体为可拆卸连接,中间圆形连接体顶端设置有螺母,螺母与连接杆相连,通过调节中间圆形连接体在连接杆上的安装位置改变加装浮力块的体积,进而控制水下压电机器人的浮沉状态。
11.更进一步的,所述竖直浮潜驱动模块在上下位置设有第一喷水口,用于水下压电机器人的沉浮运动驱动,所述水平运动驱动模块在前后位置设有第二喷水口,用于水下压电机器人的水平前进和后退方向的驱动。
12.更进一步的,所述竖直浮潜驱动模块和水平运动驱动模块上均设有压电振子对压电振子施加电压信号使其产生形变,使驱动模块容腔体积发生变化,从而在同一射流喷水口完成吸排水动作产生驱动力,通过调控压电振子激励信号的电压、频率、占空比和波形来控制相应射流喷水口驱动力的大小,由此控制水下压电机器人的运动速度和运动姿态。
13.更进一步的,通过选择性地调控竖直浮潜驱动模块中压电振子的激励信号,控制竖直浮潜驱动模块上射流喷水口的驱动力f1和f2的大小,协调控制水下压电机器人重力、浮力和驱动力三者之间的关系,可以控制水下压电机器人的沉浮状态;当控制竖直浮潜驱动模块上射流喷水口的驱动力f1、f2相等且与浮力之和大于压电机器人重力时,可以实现水下压电机器人的上沉;当控制竖直浮潜驱动模块上射流喷水口的驱动力f1、f2相等且与浮力之和等于重力时,可以实现水下压电机器人的悬停;当控制竖直浮潜驱动模块上射流喷水口的驱动力f1、f2相等且与浮力之和小于重力时,可以实现水下压电机器人的下沉;当控制竖直浮潜驱动模块上射流喷水口的驱动力f1、f2不等但与浮力之和等于重力时,可以实现水下压电机器人的俯仰,俯仰角度由驱动力f1、f2之差决定。
14.更进一步的,通过选择性地调控水平运动驱动模块中压电振子的激励信号,控制水平运动驱动模块上喷水口的驱动力f3、f4、f5和f6,可以控制压电机器人的水平运动状态;当控制水平运动驱动模块上同侧射流喷水口的驱动力f3+f5和f4+f6不相等时,可以实现水下压电机器人的前进和后退;当控制水平运动驱动模块上对侧射流喷水口的驱动力f3与f6、f4与f5大小关系,可以控制压电机器人的转弯半径;当对侧射流喷水口的驱动力相等时可以实现压电机器人的自转运动;当对侧射流喷水口的驱动力不等时可以实现压电机器人的某一角度的转向运动。
15.与现有技术相比,本发明的有益效果是:本发明解决了水下机器人在深海结构尺寸大、噪声和结构复杂,造价成本高等方面的问题。本发明以交叉型为基本结构布置相应的驱动模块,通过选择性的控制驱动模块内压电振子的振动状态,使得机器人的运动运动性能和姿态更加灵活多样,具有多自由度的运动形式。本发明采用压电陶瓷作为驱动单元,不但具有易微小型化的优势,而且经过简单的绝缘封装便可以适用于深海高压环境,无需增加压力平衡单元;且通过改变压电陶瓷的激励信号的波形与参数,便可控制水下压电机器
人的运动速度和转向半径。本发明采取模块化设计,结构简单,造价低廉,便于维修。
附图说明
16.图1为本发明所述的一种交叉结构的多自由度水下压电机器人结构示意图;
17.图2为本发明所述的竖直浮潜驱动模块结构示意图;
18.图3为本发明所述的水平运动驱动模块结构示意图;
19.图4为本发明所述的中间连接体结构示意图;
20.图5为本发明所述的浮力调整装置结构示意图;
21.图6为本发明所述的一种交叉结构的多自由度水下压电机器人排水动作示意图;
22.图7为本发明所述的一种交叉结构的多自由度水下压电机器人吸水动作示意图。
23.1:竖直浮潜驱动模块,2:水平运动驱动模块,3:中间连接体,4:浮力调整装置,1
‑1‑
1:上仓,1
‑1‑
2:第一中间组件,1
‑1‑3‑
1:第一压电陶瓷,1
‑1‑3‑
2:第一振动膜片,1
‑1‑
4:浮潜驱动壳盖,1
‑1‑
5:第一喷水口,2
‑1‑
1:运动驱动前壳盖,2
‑1‑2‑
1:第二压电陶瓷,2
‑1‑2‑
2:第二振动膜片,2
‑1‑
3:第二中间组件,2
‑1‑4‑
1:第三压电陶瓷,2
‑1‑4‑
2:第三振动膜片,2
‑1‑
5:运动驱动后壳盖,2
‑1‑
7:第二喷水口,3
‑
1:连接口,4
‑
1:连接杆,4
‑
2:支撑件,4
‑
3:中间圆形连接体,4
‑
4:螺母。
具体实施方式
24.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地阐述。
25.参见图1
‑
7说明本实施方式,一种交叉结构的多自由度水下压电机器人,它包括竖直浮潜驱动模块1、水平运动驱动模块2、中间连接体3和浮力调整装置4,所述竖直浮潜驱动模块1和水平运动驱动模块2数量均为n个,可以按需设置n个驱动模块,n为大于等于2的正整数,所述竖直浮潜驱动模块1和水平运动驱动模块2上均设有压电振子和射流喷水口,所述中间连接体3外围设置有n个连接口3
‑
1,各连接口3
‑
1位置的间隔角度可根据需求进行调整,所述竖直浮潜驱动模块1和水平运动驱动模块2与中间连接体3上的连接口3
‑
1一一对应,固定安装于中间连接体3的外围,构成交叉结构型,所述浮力调整装置4与中间连接体3紧固连接,通过改变加装浮力块的体积,控制水下压电机器人的初始浮沉状态。
26.在实施示例中,所述竖直浮潜驱动模块1数量为两个,每个竖直浮潜驱动模块1均包括上仓1
‑1‑
1、第一中间组件1
‑1‑
2、第一压电振子和浮潜驱动壳盖1
‑1‑
4,所述第一压电振子包括固连的第一压电陶瓷1
‑1‑3‑
1和第一振动膜片1
‑1‑3‑
2,所述上仓1
‑1‑
1与浮潜驱动壳盖1
‑1‑
4固定连接在第一中间组件1
‑1‑
2的两侧,所述第一压电振子通过非连接件连接方式固定安装在第一中间组件1
‑1‑
2与浮潜驱动壳盖1
‑1‑
4之间。
27.在实施示例中,所述水平运动驱动模块2数量为两个,每个水平运动驱动模块2均包括运动驱动前壳盖2
‑1‑
1、第二压电振子、第二中间组件2
‑1‑
3、第三压电振子和运动驱动后壳盖2
‑1‑
5,所述第二压电振子包括固连的第二压电陶瓷2
‑1‑2‑
1和第二振动膜片2
‑1‑2‑
2,所述第三压电振子包括固连的第三压电陶瓷2
‑1‑4‑
1和第三振动膜片2
‑1‑4‑
2,所述运动驱动前壳盖2
‑1‑
1和运动驱动后壳盖2
‑1‑
5固定连接在第二中间组件2
‑1‑
3的两侧,所述第二压电振子固定安装在运动驱动前壳盖2
‑1‑
1与第二中间组件2
‑1‑
3之间,所述第三压电振
子固定安装在第二中间组件2
‑1‑
3与运动驱动后壳盖2
‑1‑
5之间。
28.在实施示例中,所述竖直浮潜驱动模块1和水平运动驱动模块2的壳盖均为流线型外形,表面任意位置均可开设通孔,内腔为锥状收敛形结构。
29.在实施示例中,所述浮力调整装置4固定安装在中间连接体3的轴线上方,浮力调整装置4添加不同体积的浮力块并进行固定连接,从而调节水下压电机器人整体的浮力。
30.在实施示例中,所述浮力调整装置4包括连接杆4
‑
1、支撑件4
‑
2、中间圆形连接体4
‑
3和螺母4
‑
4,所述连接杆4
‑
1的底端与中间连接体3通过支撑件4
‑
2紧固连接,上端与中间圆形连接体4
‑
3为可拆卸连接,中间圆形连接体4
‑
3顶端设置有螺母4
‑
4,螺母4
‑
4与连接杆4
‑
1相连,通过调节中间圆形连接体4
‑
3在连接杆4
‑
1上的安装位置改变加装浮力块的体积,进而控制水下压电机器人的浮沉状态。
31.在实施示例中,所述竖直浮潜驱动模块1在下位置设有第一喷水口1
‑1‑
5,用于水下压电机器人的沉浮运动驱动,所述水平运动驱动模块2在前后位置设有第二喷水口2
‑1‑
7,用于水下压电机器人的水平前进和后退方向的驱动。
32.在实施示例中,圆形压电陶瓷极化方向为轴向,其厚度与直径可以调整,以满足不同的振动状态需求。压电陶瓷与振动膜片组成的压电振子产生径向的收缩扩张振动,压电振子四周固定,膜片产生弯曲,使得膜片与壳盖之间的封闭空间体积产生增减变化,驱动水从喷水口喷出。
33.在实施示例中,所述竖直浮潜驱动模块1和水平运动驱动模块2上均设有压电振子对压电振子施加电压信号使其产生形变,使驱动模块容腔体积发生变化,从而在同一射流喷水口完成吸排水动作产生驱动力,通过调控压电振子激励信号的电压、频率、占空比和波形等来控制相应射流喷水口驱动力的大小,由此控制水下压电机器人的运动速度和运动姿态。
34.在实施示例中,通过选择性地调控竖直浮潜驱动模块1中压电振子的激励信号,控制竖直浮潜驱动模块1上射流喷水口的驱动力f1和f2的大小,协调控制水下压电机器人重力、浮力和驱动力三者之间的关系,可以控制水下压电机器人的沉浮状态;当控制竖直浮潜驱动模块1上射流喷水口的驱动力f1、f2相等且与浮力之和大于压电机器人重力时,可以实现水下压电机器人的上沉;当控制竖直浮潜驱动模块1上射流喷水口的驱动力f1、f2相等且与浮力之和等于重力时,可以实现水下压电机器人的悬停;当控制竖直浮潜驱动模块1上射流喷水口的驱动力f1、f2相等且与浮力之和小于重力时,可以实现水下压电机器人的下沉;当控制竖直浮潜驱动模块1上射流喷水口的驱动力f1、f2不等但与浮力之和等于重力时,可以实现水下压电机器人的俯仰,俯仰角度由驱动力f1、f2之差决定。
35.在实施示例中,通过选择性地调控水平运动驱动模块2中压电振子的激励信号,控制水平运动驱动模块上喷水口的驱动力f3、f4、f5和f6,可以控制压电机器人的水平运动状态;当控制水平运动驱动模块2上同侧射流喷水口的驱动力f3+f5和f4+f6不相等时,可以实现水下压电机器人的前进和后退;当控制水平运动驱动模块2上对侧射流喷水口的驱动力f3与f6、f4与f5大小关系,可以控制压电机器人的转弯半径;当对侧射流喷水口的驱动力相等时可以实现压电机器人的自转运动;当对侧射流喷水口的驱动力不等时可以实现压电机器人的某一角度的转向运动。
36.以上对本发明所提供的一种交叉结构的多自由度水下压电机器人,进行了详细介
绍,本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。