1.本实用新型涉及一种浆板,尤其涉及一种立式浆板。
背景技术:
2.划水板又名浆板,是靠使用者站立或者蹲坐在浆板上,使用船桨作为动力驱动浆板行驶或者转弯,是现在非常流行的水上运动,现有的浆板行驶方向主要是由使用者通过船桨的划动来控制浆板的行驶方向,浆板的尾部安装有尾鳍,尾鳍主要是控制浆板行驶时的导向,防止浆板发生旋转,当浆板行驶至水流非常喘急的水面上时,使用者很难单靠船桨来控制浆板的行驶方向,容易偏离航道发生危险。
技术实现要素:
3.为了克服使用者很难单靠船桨来控制浆板的行驶方向,容易偏离航道发生危险的缺点,本实用新型的技术问题是:提供一种可通过转动尾鳍控制行驶方向的立式浆板。
4.技术方案如下:一种立式浆板,包括有浆板、第一尾鳍、第二尾鳍、第三尾鳍、固定网、防滑球、密封盖、尾鳍控制机构和尾鳍转动机构,浆板下侧后部中间位置设置有第一尾鳍,第二尾鳍与第三尾鳍设置于浆板下侧后部两侧,固定网设置于浆板上侧前部,防滑球固定设置于浆板上侧,第一下压槽与第二下压槽设置于浆板中间位置,连通洞设置于浆板中间位置,并连通第一下压槽与第二下压槽,后安装槽设置于浆板后端,密封盖设置于浆板后端后安装槽上方,将后安装槽密封,尾鳍控制机构设置浆板中间位置的第一下压槽、第二下压槽和连通洞内,尾鳍控制机构用于尾鳍的转动控制,尾鳍转动机构设置于浆板后部后安装槽内,尾鳍转动机构与第一尾鳍、第二尾鳍和第三尾鳍固定连接,尾鳍转动机构用于尾鳍的转动动力的传送。
5.优选的技术方案,尾鳍控制机构包括有第一控制板、第二控制板,第一弹簧、控制杆、轴杆和连接机构,第一控制板设置于第一下压槽内,第一控制板与浆板滑动连接,第二控制板设置于第二下压槽内,第二控制板与浆板滑动连接,第一弹簧设置有多个,多个第一弹簧设置于第一下压槽与第二下压槽内部,第一弹簧的一端固定连接于第一下压槽与第二下压槽底部,第一弹簧的另一端固定连接于第一控制板与第二控制板的下侧,控制杆穿过连通洞,控制杆的两端分别设置有滑动槽,轴杆设置于浆板的连通洞与后安装槽的中间位置,轴杆与浆板转动连接,控制杆的中间位置转动连接于轴杆的一端,连接机构设置有两个,两个连接机构的一端分别固定连接于第一控制板与第二控制板的下侧,两个连接机构的另一端分别滑动连接于控制杆两端的滑槽内。
6.优选的技术方案,连接机构包括有滑动器、滑块、滑动杆和圆轴,滑动器的上端固定连接于第一控制板与第二控制板的下侧,滑动杆的一端设置于滑动器内部与其滑动连接,滑块固定连接于滑动杆的一端,滑块与滑动器内部滑槽滑动连接,圆轴转动连接于滑动杆的另一端,圆轴与控制杆两端的滑槽滑动练连接。
7.优选的技术方案,尾鳍转动机构包括有第一转轴、竖支架、第一锥齿轮、第二锥齿
轮、第二转轴、第一带轮、第二带轮、第三转轴、第三带轮和第四带轮,第一转轴、第二转轴和第三转轴的下端设置于后安装槽内并与浆板转动连接,第一转轴、第二转轴和第三转轴的上端转动连接于密封盖,第一尾鳍的上端固定连接于第一转轴的下端,第二尾鳍的上端固定连接于第二转轴的下端,第三尾鳍的上端固定连接于第三转轴的下端,竖支架的一端固定连接于后安装槽的底部,轴杆的一端与竖支架的另一端转动连接,第一锥齿轮固定连接于轴杆靠近竖支架的一端,第二锥齿轮固定连接于第一转轴,第二锥齿轮与第一锥齿轮啮合,第一带轮与第四带轮分别固定连接于第一转轴,第二带轮固定连接于第二转轴,第二带轮与第一带轮上饶有动力皮带,第三带轮固定连接于第三转轴,第三带轮与第四带轮上饶有动力皮带。
8.优选的技术方案,还包括有控制板锁制机构,控制板锁制机构包括有直齿轮、转杆、第一锁杆、第二锁杆、转动手柄、盖板和锁块,控制板锁制机构设置于浆板上侧中间位置的凹槽内,转杆的一端固定连接于浆板,直齿轮转动连接于转杆,转动手柄的一端固定连接于直齿轮的偏心位置,锁块设置有两个,两个锁块分别固定连接于第一控制板与第二控制板下侧,第一锁杆与第二锁杆均穿过浆板,第一锁杆与第二锁杆靠近直齿轮的一部均设置有齿条,第一锁杆与第二锁杆的齿条部分均与直齿轮啮合,第一锁杆与第二锁杆靠近锁块的一端设置为圆角,并与锁块配合,盖板固定连接于浆板,盖板设置有弧形滑槽,转动手柄穿过盖板的弧形滑槽。
9.优选的技术方案,还包括有尾鳍锁制机构,尾鳍锁制机构包括有固定架、固定块、滑动架、固定板、拉力簧、第一锁板、第二锁板和第二弹簧,密封盖的中间位置设置有安装孔,固定架固定连接于密封盖的中间位置的安装孔内,固定块固定连接于轴杆靠近竖支架的一端,滑动架滑动设置于固定架内部,滑动架为四棱柱下端设置有凹槽,固定板与拉力簧分别设置有两个,两个固定板的一端分别固定设置于滑动架的两侧,两个拉力簧的一端固定连接于两个固定板的一侧,两个拉力簧的另一端固定连接于密封盖的下侧,第一锁板与第二锁板分别滑动设置于滑动架上端的凹槽内,第二弹簧设置于第一锁板与第二锁板的中间位置,第二弹簧的两端分别与第一锁板与第二锁板固定连接,固定架设置有上锁制孔和下锁制孔。
10.优选的技术方案,还包括有防滑球,防滑球设置为硅胶材质,防滑球均匀固定设置于浆板、第一控制板与第二控制板上侧。
11.本实用新型通过使用者利用身体,控制双脚踩压第一控制板与第二控制板来带动轴杆正时针转动或逆时针转动,来调节尾鳍的转动方向,轴杆正时针转动带动尾鳍转动实现了浆板的向右转弯行驶,轴杆逆时针转动带动尾鳍转动实现了浆板的向左转弯行驶,当不需要控制尾鳍转动,来控制浆板的行驶方向时,通过向下压动滑动架,使滑动架的凹槽将固定块锁死,实现了轴杆的锁死,轴杆的锁死实现了尾鳍的锁死,防止尾鳍受到水流的作用力自由转动。
附图说明
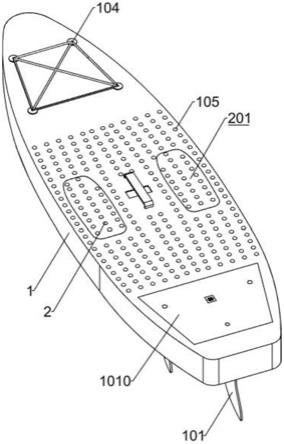
12.图1为本实用新型的立体结构示意图。
13.图2为本实用新型的尾鳍分布立体结构示意图。
14.图3为本实用新型的剖面立体结构示意图。
15.图4为本实用新型的尾鳍控制机构结构示意图。
16.图5为本实用新型的尾鳍转动机构立体结构示意图。
17.图6为本实用新型的第一下压槽与第二下压槽立体结构示意图。
18.图7为本实用新型的后安装槽立体结构示意图。
19.图8为本实用新型的控制杆与连接机构立体结构示意图。
20.图9为本实用新型的连接机构立体结构示意图。
21.图10为本实用新型的尾鳍转动机构立体结构示意图。
22.图11为本实用新型的控制板锁制机构下侧立体结构示意图。
23.图12为本实用新型的控制板锁制机构上侧立体结构示意图。
24.图13为本实用新型的控制板锁制机构内部立体结构示意图。
25.图14为本实用新型的尾鳍锁制机构与轴杆立体结构示意图。
26.图15为本实用新型的尾鳍锁制机构立体结构示意图。
27.图16为本实用新型的尾鳍锁制机构内部立体结构示意图。
28.图中附图标记的含义:1、浆板,101、第一尾鳍,102、第二尾鳍,103、第三尾鳍,104、固定网,105、防滑球,106、第一下压槽,107、第二下压槽,108、连通洞,109、后安装槽,1010、密封盖,2、第一控制板,201、第二控制板,202、第一弹簧,3、控制杆,301、轴杆,4、滑动器,401、滑块,402、滑动杆,403、圆轴,5、第一转轴,501、竖支架,502、第一锥齿轮,503、第二锥齿轮,504、第二转轴,505、第一带轮,506、第二带轮,507、第三转轴,508、第三带轮,509、第四带轮,6、直齿轮,601、转杆,602、第一锁杆,603、第二锁杆,604、转动手柄,605、盖板,606、锁块,7、固定架,701、固定块,702、滑动架,703、固定板,704、拉力簧,705、第一锁板,706、第二锁板,707、第二弹簧。
具体实施方式
29.下面结合具体实施例对技术方案做进一步的说明,需要注意的是:本文中所说的上、下、左、右等指示方位的字词仅是针对所示结构在对应附图中位置而言。本文中为零部件所编序号本身,例如:第一、第二等,仅用于区分所描述的对象,不具有任何顺序或技术含义。而本技术所说如:连接、联接,如无特别说明,均包括直接和间接连接。
30.实施例1
31.一种立式浆板,如图1
‑
图3所示,包括有浆板1、第一尾鳍101、第二尾鳍102、第三尾鳍103、固定网104、防滑球105、密封盖1010、尾鳍控制机构和尾鳍转动机构,浆板1下侧后部中间位置设置有第一尾鳍101,第二尾鳍102与第三尾鳍103设置于浆板1下侧后部两侧,第一尾鳍101、第二尾鳍102和第三尾鳍103设置为三角状态,固定网104设置于浆板1上侧前部,防滑球105固定设置于浆板1上侧,第一下压槽106与第二下压槽107设置于浆板1中间位置,连通洞108设置于浆板1中间位置,并连通第一下压槽106与第二下压槽107,后安装槽109设置于浆板1后端,密封盖1010设置于浆板1后端后安装槽109上方,将后安装槽109密封,尾鳍控制机构设置浆板1中间位置的第一下压槽106、第二下压槽107和连通洞108内,尾鳍控制机构用于尾鳍的转动控制,尾鳍转动机构设置于浆板1后部后安装槽109内,尾鳍转动机构与第一尾鳍101、第二尾鳍102和第三尾鳍103固定连接,尾鳍转动机构用于尾鳍的转动动力的传送。
32.使用时使用者双脚站立在浆板1上的尾鳍控制机构上,通过划动船桨使浆板1向前行驶,通过身体控制双脚在尾鳍控制机构上的不同压力来带动尾鳍转动机构转动,尾鳍转动机构转动带动第一尾鳍101、第二尾鳍102和第三尾鳍103转动来控制浆板1的行驶方向。
33.实施例2
34.在实施例1的基础之上,如图3、图4、图6和图8所示,尾鳍控制机构包括有第一控制板2、第二控制板201,第一弹簧202、控制杆3、轴杆301和连接机构,第一控制板2设置于第一下压槽106内,第一控制板2与浆板1滑动连接,第二控制板201设置于第二下压槽107内,第二控制板201与浆板1滑动连接,第一弹簧202设置有8个,4个第一弹簧202设置于第一下压槽106内部,4个第一弹簧202设置于第二下压槽107内部,第一弹簧202的下端固定连接于第一下压槽106与第二下压槽107底部,第一弹簧202的上端固定连接于第一控制板2与第二控制板201的下侧,控制杆3穿过连通洞108,控制杆3的两端分别设置有滑动槽,轴杆301设置于浆板1的连通洞108与后安装槽109的中间位置,轴杆301与浆板1转动连接,控制杆3的中间位置转动连接于轴杆301的前端,连接机构设置有两个,两个连接机构的上端分别固定连接于第一控制板2与第二控制板201的下侧,两个连接机构的下端分别滑动连接于控制杆3两端的滑槽内。
35.使用者的双脚分别站立在第一控制板2与第二控制板201上,通过划动船桨使浆板1向前行驶,当身体控制双脚对第一控制板2与第二控制板201相同的下压力时控制杆3保持水平状态,通过身体控制双脚在第一控制板2与第二控制板201上的不同压力,实现第一控制板2与第二控制板201上的上升和下降,当身体控制左脚向下踩压时右脚向上抬起,第一控制板2向下移动压缩第一弹簧202,第一控制板2向下通过连接机构向下压动控制杆3的左部,控制杆3的左部向下运动,控制杆3的右部向上运动,实现了控制杆3的向左摆动带动轴杆301逆时针转动,当身体控制右脚向下踩压时左脚向上抬起,第二控制板201向下移动压缩第一弹簧202,第二控制板201向下通过连接机构向下压动控制杆3的右部,控制杆3的右部向下运动,控制杆3的左部向上运动,实现了控制杆3的向右摆动带动轴杆301正时针转动。
36.如图3、图8和图9所示,连接机构包括有滑动器4、滑块401、滑动杆402和圆轴403,滑动器4的上端固定连接于第一控制板2与第二控制板201的下侧,滑动杆402的一端设置于滑动器4内部与其滑动连接,滑块401固定连接于滑动杆402的上端与滑动器4内部滑槽滑动连接,圆轴403转动连接于滑动杆402的下端,圆轴403与控制杆3两端的滑槽滑动练连接。
37.使用时当身体控制双脚对第一控制板2与第二控制板201实现不同的下压力时,第一控制板2与第二控制板201分别向下压动滑动器4,滑动器4向下运动当滑动杆402的上端,顶住滑动器4内部下侧时,带动滑动杆402向下运动,滑动杆402向下运动带动圆轴403向下运动,圆轴403向下运动按照控制杆3上滑槽的轨道运动向下压动控制杆3,使用者在驾驶浆板1时,由于为了控制身体在浆板1上的平衡,出现了幅度较小的双脚对第一控制板2与第二控制板201不同的下压力时,滑动杆402与滑动器4的空行程,使控制杆3保持平衡不会带动轴杆301转动。
38.如图3、图5、图7和图10所示,尾鳍转动机构包括有第一转轴5、竖支架501、第一锥齿轮502、第二锥齿轮503、第二转轴504、第一带轮505、第二带轮506、第三转轴507、第三带轮508和第四带轮509,第一转轴5、第二转轴504和第三转轴507的下端设置于后安装槽109
内并与浆板1转动连接,第一转轴5、第二转轴504和第三转轴507的上端转动连接于密封盖1010,第一尾鳍101的上端固定连接于第一转轴5的下端,第二尾鳍102的上端固定连接于第二转轴504的下端,第三尾鳍103的上端固定连接于第三转轴507的下端,竖支架501的下端固定连接于后安装槽109的底部,轴杆301的后端与竖支架501的上端转动连接,第一锥齿轮502固定连接于轴杆301靠近竖支架501的一端,第二锥齿轮503固定连接于第一转轴5,第二锥齿轮503与第一锥齿轮502啮合,第一带轮505与第四带轮509分别固定连接于第一转轴5,第二带轮506固定连接于第二转轴504,第二带轮506与第一带轮505上饶有动力皮带,第三带轮508固定连接于第三转轴507,第三带轮508与第四带轮509上饶有动力皮带。
39.当使用者通过双脚控制第一控制板2与第二控制板201来带动轴杆301正时针或逆时针转动时,轴杆301转动带动第一锥齿轮502转动,第一锥齿轮502转动带动第二锥齿轮503转动,第二锥齿轮503转动带动第一转轴5转动,第一转轴5转动带动第一尾鳍101转动,第一转轴5转动带动第一带轮505与第四带轮509转动,第一带轮505与第四带轮509转动分别通过动力皮带带动第二带轮506与第三带轮508转动,第二带轮506与第三带轮508转动分别带动第二转轴504与第三转轴507转动,第二转轴504与第三转轴507转动分别带动第二尾鳍102与第三尾鳍103转动,轴杆301正时针转动带动第一尾鳍101、第二尾鳍102与第三尾鳍103逆时针转动,使浆板1向右转弯行驶,轴杆301逆时针转动带动第一尾鳍101、第二尾鳍102与第三尾鳍103正时针转动,使浆板1向左转弯行驶,实现了浆板1的转弯控制。
40.实施例3
41.在实施例2的基础之上,如图11
‑
图13所示,还包括有控制板锁制机构,控制板锁制机构包括有直齿轮6、转杆601、第一锁杆602、第二锁杆603、转动手柄604、盖板605和锁块606,控制板锁制机构设置于浆板1上侧中间位置的凹槽内,转杆601的下端固定连接于浆板1,直齿轮6转动连接于转杆601,转动手柄604的下端固定连接于直齿轮6上侧的偏心位置,锁块606设置有两个,两个锁块606分别固定连接于第一控制板2与第二控制板201下侧靠近直齿轮6的一边,第一锁杆602与第二锁杆603均穿过浆板1,第一锁杆602与第二锁杆603靠近直齿轮6的一部均设置有齿条,第一锁杆602与第二锁杆603的齿条部分均与直齿轮6啮合,第一锁杆602与第二锁杆603靠近锁块606的一端设置为圆角,并与锁块606配合,盖板605固定连接于浆板1,盖板605设置有弧形滑槽,转动手柄604穿过盖板605的弧形滑槽。
42.当使用者不需要通过双脚踩压第一控制板2与第二控制板201来控制尾鳍转动来实现浆板1的行驶方向时,通过正时针转动手柄604带动直齿轮6正时针转动,直齿轮6正时针转动带动第一锁杆602与第二锁杆603向两侧伸出,第一锁杆602与第二锁杆603插入第一控制板2与第二控制板201下侧的锁块606内,将第一控制板2与第二控制板201锁住,防止第一控制板2与第二控制板201向下运动,实现了尾鳍的垂直不受使用者的控制,通过船桨来控制浆板1的行驶方向,通过逆时针转动手柄604带动直齿轮6逆时针转动,直齿轮6逆时针转动带动第一锁杆602与第二锁杆603向中间收缩,实现了第一控制板2与第二控制板201的解锁,解锁后的第一控制板2与第二控制板201可实现通过双脚的踩压自由上下运动,控制尾鳍的转动来控制浆板1的行驶方向。
43.如图14
‑
图16所示,还包括有尾鳍锁制机构,尾鳍锁制机构包括有固定架7、固定块701、滑动架702、固定板703、拉力簧704、第一锁板705、第二锁板706和第二弹簧707,密封盖1010的中间位置设置有安装孔,固定架7固定连接于密封盖1010的中间位置的安装孔内,固
定块701固定连接于轴杆301靠近竖支架501的一端,滑动架702滑动设置于固定架7内部,滑动架702为四棱柱下端设置有凹槽,固定板703与拉力簧704分别设置有两个,两个固定板703的一端分别固定设置于滑动架702的两侧,两个拉力簧704的下端固定连接于两个固定板703的上侧,两个拉力簧704的上端固定连接于密封盖1010的下侧,第一锁板705与第二锁板706分别滑动设置于滑动架702上端的凹槽内,第二弹簧707设置于第一锁板705与第二锁板706的中间位置,第二弹簧707的两端分别与第一锁板705与第二锁板706固定连接,固定架7设置有上锁制孔和下锁制孔。
44.当使用者不需要通过双脚踩压第一控制板2与第二控制板201来控制尾鳍转动来实现浆板1的行驶方向时,将第一锁板705与第二锁板706向中间挤压,同时压缩第二弹簧707,将第一锁板705与第二锁板706从固定架7上锁制孔内收缩出来,向下按压滑动架702,同时拉伸拉力簧704,滑动架702下方的凹槽将固定块701卡死,被压缩的第二弹簧707复位将第一锁板705与第二锁板706向外推出插入固定架7下锁制孔内,固定块701的卡死将防止轴杆301转动,实现了轴杆301的固定锁死,轴杆301的固定锁死实现了第一转轴5、第二转轴504和第三转轴507的锁死,防止了第一尾鳍101、第二尾鳍102和第三尾鳍103的转动,实现了尾鳍的锁死,当需要尾鳍控制浆板1的行驶方向时,将第一锁板705与第二锁板706向中间挤压,同时压缩第二弹簧707,将第一锁板705与第二锁板706从固定架7下锁制孔内收缩出来,被拉伸的拉力簧704复位,将滑动架702向上拉动,使滑动架702和固定块701分离,被压缩的第二弹簧707复位将第一锁板705与第二锁板706向外推动,插入固定架7上锁制孔内,实现了轴杆301的转动,轴杆301的转动可控制尾鳍的转动,实现了尾鳍控制浆板1的行驶方向。
45.还包括有防滑球105,防滑球105设置为硅胶材质,防滑球105均匀固定设置于浆板1、第一控制板2与第二控制板201上侧。
46.使用者站立或者蹲坐在浆板1上时,硅胶材质的防滑球105将增加使用者与浆板1的摩擦力,防止摩擦力不足将使用者从浆板1上滑倒跌入水中。
47.本行业的技术人员应该了解,上述实施例不以任何形式限制本实用新型,凡采用等同替换或等效变换的方式所获得的技术方案,均落在本实用新型的保护范围内。