1.本实用新型涉及船模试验设备技术领域,具体涉及一种拖拽小车及调速控制拖拽系统。
背景技术:
2.拖曳水池是船模水池试验的主要场所,是进行船舶快速性试验的基本设施,其主要作用在于使船模在水中不同深度下做匀速直线运动,从而完成船模快速性及耐波性试验项目。拖曳水池中最重要的技术设备是拖车,拖车匀速运动的精度直接影响到船模运动速度和试验结果的精度。传统的拖车结构复杂,电机等操作系统都设置在拖车上,存在一定的安全隐患;而且,船模稳定性不佳,容易发生侧翻,影响最终的实验结果。
技术实现要素:
3.本实用新型所要解决的技术问题是提供一种拖拽小车及调速控制拖拽系统,旨在解决上述技术问题。
4.本实用新型解决上述技术问题的技术方案如下:
5.一种拖拽小车,包括载体板、滚筒和两个定滑轮,所述滚筒可转动的安装在所述载体板一侧的中部,用于穿插船模的牵引绳索;两个所述定滑轮相对转动的安装在所述载体板一侧的两端,其中心轴线与所述滚筒的中心轴线平行,并分别用于穿插船模两侧的平衡绳索。
6.本实用新型的有益效果是:试验时,牵引绳索带动船舶水平移动,同时两根平衡绳索定位住船模的两侧,保证船模的稳定性,避免发生侧翻,有利于试验的进行。本实用新型结构简单,既可实现船模在一定吃水深度的水平移动,又可保证船模的稳定性,避免侧翻,通过让船模在保持平衡的状态下在不同深度进行运动,从而获取实验数据进行船舶航行性能的预测。
7.在上述技术方案的基础上,本实用新型还可以做如下改进。
8.进一步,还包括滑轨,所述载体板可滑动的安装在所述滑轨上并定位。
9.采用上述进一步方案的有益效果是试验时,通过上述载体板在滑轨上移动以改变船模的吃水深度,对水中船模所在深度进行精准的调节。
10.进一步,所述滑轨上安装有用于驱动所述载体板滑动的驱动组件。
11.采用上述进一步方案的有益效果是试验时,通过驱动组件驱动载体板在滑轨上移动,以改变船模的吃水深度,对水中船模所在深度进行精准的调节。
12.进一步,所述驱动组件包括升降电机和轮子,所述轮子可转动的安装在所述滑轨的一端,所述升降电机固定安装在所述滑轨的另一端,其驱动端上缠绕有升降绳索,所述升降绳索的一端与所述载体板的一端固定连接,另一端绕过所述轮子后与所述载体板的另一端固定连接。
13.采用上述进一步方案的有益效果是试验时,通过升降电机正转或反转以改变升降
绳索两端的长度,从而改变载体板的位置,进而改变船模的吃水深度,实现船模吃水深度的精确自动调节。
14.进一步,所述载体板上设有至少一组滑动组件,每组所述滑动组件均包括至少一个滚轮,所述滚轮通过支架转动的安装在所述载体板的另一侧上,并与所述滑轨滑动配合。
15.采用上述进一步方案的有益效果是载体板通过滚轮与滑轨滑动配合,滚轮将载体板与滑轨的滑动摩擦转变为滚动摩擦,可以减小摩擦力,保证载体板在滑轨上的快速滑动。
16.进一步,所述滑轨的截面呈工字形结构,每组所述滑动组件均包括两个滚轮,两个所述滚轮相对转动的安装在所述载体板的另一侧上,其分别设置在所述滑轨一侧端的两侧,并分别与所述滑轨的两侧端延伸出的平板滑动配合。
17.采用上述进一步方案的有益效果是滑轨的结构设计特殊,并利用其结构的特殊性与两个滚轮滑动配合,实现载体板与滑轨的滑动配合,且滑动的稳定性较佳。
18.进一步,每组所述滑动组件均还包括压轮,所述压轮可转动的安装在所述载体板的另一侧上,其与所述滚轮分别位于所述滑轨的两侧,且所述压轮与所述滑轨的一侧转动贴合。
19.采用上述进一步方案的有益效果是行走时,通过压轮压住滑轨的另一侧,并与滚轮配合,实现载体板在滑轨上的快速行走。
20.进一步,所述滑动组件的数量为两组,两组所述滑动组件沿所述载体板滑动的方向间隔分布在所述载体板的另一侧上。
21.采用上述进一步方案的有益效果是结构简单,设计合理,进一步保证了载体板在滑轨上滑动的稳定性。
22.本实用新型还涉及一种调速控制拖拽系统,包括两个拖拽电机、一个绷紧电机以及两个如上所述的拖拽小车,两个所述滑轨相对竖直固定安装在试验池的两侧;两个所述拖拽电机分别固定安装在两个所述滑轨上,其驱动端分别与两根所述牵引绳索的一端固定连接,两根所述牵引绳索的另一端分别绕过两个所述滚筒,并与船模两侧的中心处固定连接;所述绷紧电机固定安装在其中一个所述滑轨上,其驱动端分别与两根所述平衡绳索的一端固定连接,两根所述平衡绳索的另一端分别绕过其中一个所述载体板上的两个所述定滑轮后穿过船模两端的定位件,并分别绕过另一个所述载体板上的两个所述定滑轮后与所述另一个所述滑轨固定连接。
23.采用上述进一步方案的有益效果是试验时,两个拖拽电机通过工作,并利用两根牵引绳索实现船模的水平移动;同时,绷紧电机通过两根平衡绳索实现船模两侧的定位,避免船模发生侧翻,保证船模的稳定性,从而保证试验的顺利进行。
24.进一步,两个所述定位件分别为定位环。
25.采用上述进一步方案的有益效果是结构简单,设计合理,能够很好的与两根平衡绳索配合,保证船模的稳定性。
附图说明
26.图1为本实用新型的结构示意图之一;
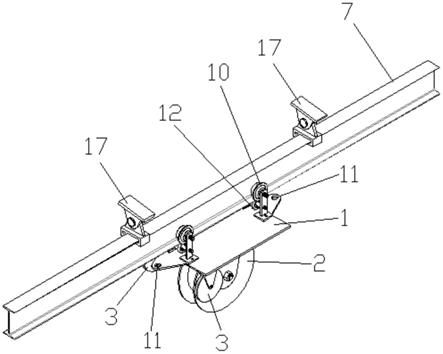
27.图2为本实用新型的结构示意图之二;
28.图3为本实用新型试验时的结构示意图;
29.图4为图3中a的放大图;
30.图5为图3中b的放大图;
31.图6为本实用新型中船模试验时的部分俯视图。
32.附图中,各标号所代表的部件列表如下:
33.1、载体板;2、滚筒;3、定滑轮;4、船模;5、牵引绳索;6、平衡绳索;7、滑轨;8、轮子;9、升降绳索;10、滚轮;11、圆孔;12、压轮;13、拖拽电机;14、绷紧电机;15、试验池;16、定位件;17、连接座。
具体实施方式
34.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
35.如图1至图6所示,本实用新型提供一种拖拽小车,包括载体板1、滚筒2和两个定滑轮3,滚筒2可转动的安装在载体板1一侧的中部,用于穿插船模4的牵引绳索5;载体板1上焊接有支架,滚筒2通过转轴与支架转动连接;两个定滑轮3相对转动的安装在载体板1一侧的两端,其中心轴线与滚筒2的中心轴线平行,并分别用于穿插船模4两侧的平衡绳索6;载体板1上分别设有两个支架,两个定滑轮3分别通过转轴与两个支架转动连接。试验时,牵引绳索5带动船舶4水平移动,同时两根平衡绳索6定位住船模4的两侧,保证船模4的稳定性,避免船模4发生侧翻,有利于试验的进行。本实用新型结构简单,既可实现船模4在一定吃水深度的水平移动,又可保证船模4的稳定性,避免侧翻,通过让船模4在保持平衡的状态下在不同深度进行运动,从而获取实验数据进行船舶航行性能的预测。
36.实施例1
37.在上述结构的基础上,本实施例还包括滑轨7,载体板1可滑动的安装在滑轨7上并定位。试验时,通过上述载体板1在滑轨7上移动以改变船模4的吃水深度,对水中船模4所在深度进行精准的调节。
38.实施例2
39.在实施例一的基础上,本实施例中,滑轨7上安装有用于驱动载体板1滑动的驱动组件。试验时,通过驱动组件驱动载体板1在滑轨7上移动,以改变船模4的吃水深度,对水中船模4所在深度进行精准的调节。
40.实施例3
41.在实施例二的基础上,本实施例中,驱动组件包括升降电机和轮子8,轮子8可转动的安在滑轨7的一端,升降电机固定安装在滑轨7的另一端,其驱动端上缠绕有升降绳索9,升降绳索9的一端与载体板1的一端固定连接,另一端绕过轮子8后与载体板1的另一端固定连接。试验时,通过升降电机正转或反转以改变升降绳索9两端的长度,从而改变载体板1的位置,带动船模4上下移动,进而改变船模4的吃水深度,实现船模4吃水深度的精确自动调节。
42.优选地,本实施例中,上述载体板1的两端上分别设有与升降绳索9两端配合的圆孔11,结构简单,方便快速连接升降绳索9,操作简便,省时省力。
43.应用时,轮子8位于滑轨7的下端。
44.实施例4
45.在上述结构的基础上,本实施例中,载体板1上设有至少一组滑动组件,每组滑动组件均包括至少一个滚轮10,滚轮10通过支架转动的安装在载体板1的另一侧上,并与滑轨7滑动配合;支架与载体板1一体成型,结构简单。载体板1通过滚轮10与滑轨7滑动配合,滚轮10将载体板1与滑轨7的滑动摩擦转变为滚动摩擦,可以减小摩擦力,保证载体板1在滑轨7上的快速滑动。
46.实施例5
47.在实施例四的基础上,优选地,本实施例中,滑轨7的截面呈工字形结构,每组滑动组件均包括两个滚轮10,两个滚轮10相对转动的安装在载体板1的另一侧上,其分别设置在滑轨7一侧端的两侧,并分别与滑轨7的两侧端延伸出的平板滑动配合。滑轨7的结构设计特殊,并利用其结构的特殊性与两个滚轮10滑动配合,实现载体板1与滑轨7的滑动配合,且滑动的稳定性较佳。
48.除上述结构外,每组滑动组件中的滚轮10也可以采用一个,此时滑轨7的截面可以呈u形结构,滚轮10转动的安装在u形槽内。
49.实施例6
50.在实施例四的基础上,本实施例中,每组滑动组件均还包括压轮12,压轮12可转动的安装在载体板1的另一侧上,其与滚轮10分别位于滑轨7的两侧,且压轮12与滑轨7的一侧转动贴合。行走时,通过压轮12压住滑轨7的另一侧,并与滚轮10配合,实现载体板1在滑轨7上的快速行走。
51.上述压轮12方案可以与实施例五的方案并存,也可以单独存在。
52.实施例7
53.在实施例四的基础上,优选地,本实施例中,滑动组件的数量为两组,两组滑动组件沿载体板1滑动的方向间隔分布在载体板1的另一侧上,结构简单,设计合理,进一步保证了载体板1在滑轨7上滑动的稳定性。
54.实施例8
55.在上述结构的基础上,本实施例还涉及一种调速控制拖拽系统,包括两个拖拽电机13、一个绷紧电机14以及两个如上的拖拽小车,两个滑轨7相对竖直固定安装在试验池15的两侧;两个拖拽电机13分别固定安装在两个滑轨7上,其驱动端分别与两根牵引绳索5的一端固定连接,两根牵引绳索5的另一端分别绕过两个滚筒2,并与船模4两侧的中心处固定连接;绷紧电机14固定安装在其中一个滑轨7上,其驱动端分别与两根平衡绳索6的一端固定连接,两根平衡绳索6的另一端分别绕过其中一个载体板1上的两个定滑轮3后穿过船模4两端的定位件16,并分别绕过另一个载体板1上的两个定滑轮3后与另一个滑轨7固定连接。试验时,两个拖拽电机13通过工作,并利用两根牵引绳索5实现船模4的水平移动;同时,绷紧电机14通过两根平衡绳索6实现船模4两侧的定位,避免船模4发生侧翻,保证船模4的稳定性,从而保证试验的顺利进行。
56.上述两个滑轨7可以通过螺栓直接与试验池15的池壁固定连接,也可以利用滑轨7的特殊结构,在工字形滑轨7上卡接有至少一个连接座17,连接座17通过螺栓与试验池15的池壁固定连接。
57.上述连接座17的数量优选为两个,两个连接座17分别靠近滑轨7的两端,保证滑轨7安装的稳定性。
58.另外,上述船模4的两侧分别焊接有系环,牵引绳索5直接与系环连接。
59.上述两个拖拽电机13、一个绷紧电机14以及两个升降电机可以固定在试验池15的边缘上,安全可靠,也可以部分固定在试验池15的边缘上,部分固定在滑轨7的对应端上。
60.实施例9
61.在实施例八的基础上,优先地,本实施例中,两个定位件16分别为定位环,结构简单,设计合理,能够很好的与两根平衡绳索6配合,保证船模4的稳定性。
62.上述两个定位环均与船模4一体成型,结构简单。
63.本实用新型的工作原理如下:
64.试验时,两个升降电机同步正转或反转以改变升降绳索9两端的长度,从而改变载体板1的位置,带动船模4上下移动,进而改变船模4的吃水深度,实现船模4吃水深度的精确自动调节;
65.另外,两个拖拽电机13中,其中一个收缩对应的牵引绳索5,同时另一个释放对应的牵引绳索5使得船模4水平移动;
66.同时,绷紧电机14通过两根平衡绳索6实现船模4两侧的定位,避免船模4发生侧翻,保证船模4的稳定性,从而保证试验的顺利进行。
67.需要说明的是,本实用新型所涉及到的各个电子部件均采用现有技术,并且上述各个部件与控制器电连接,控制器与各个部件之间的控制电路为现有技术。
68.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。