1.本发明属于无缆水下机器人技术领域,特别是涉及一种仿莱氏拟乌贼及虾姑的水下多自由度运动机器人。
背景技术:
2.无缆水下机器人(auv)是一种理想的测量仪器平台,其具有噪声辐射小、可贴近观测对象、可按设定高度进行海底地形跟踪的特点,并且可以获取采用常规手段所不能获取的高质量数据和图像,同时其还具有造价低、隐蔽性好、安全性高的特点,使无缆水下机器人(auv)正逐步成为海洋观察和探测的重要手段。
3.目前,无缆水下机器人(auv)的主要分为三种类型,包括鱼雷型、水下直升机型及仿生型。以仿生型为例,该类型中包含采用正弦波等类似波形模式进行推进的方案,由于正弦波等类似波形的特殊性,其波形推进的过程中对周围流体造成的上下部分作用力互相抵消,剩余作用力则作为向前或者向后的推力,并且通过组合还可实现转向及原地旋转。
4.但是,现有的采用正弦波等类似波形模式进行推进的仿生水下机器人,虽然具备了一定的水平运动能力,但因受到正弦波上下分作用力相互抵消的制约,此类仿生水下机器人在垂直方向上只受重力和浮力的影响,而水下环境中的浮力和重力又可以看作是基本不变的,这就导致此类仿生水下机器人无法实现在水中的悬停,也无法实现纵向高度的调整。此外,此类仿生水下机器人的水下运动自由度较差,可操作自由度被限定在一个平面内,也无法实现侧倾、翻滚等动作,从而严重限制了其环境适用性。
技术实现要素:
5.针对现有技术存在的问题,本发明提供一种仿莱氏拟乌贼及虾姑的水下多自由度运动机器人,首次将莱氏拟乌贼及虾姑的仿生设计应用在同一台仿生水下机器人中,通过对莱氏拟乌贼的仿生设计,使水下机器人具备了快速推进移动的能力,通过对虾姑的仿生设计,弥补了传统正弦波等类似波形模式进行推进方案中垂直方向上运动自由度不足的缺陷,具备了在水中悬停以及进行纵向高度调整的能力,同时还具备了在水中完成侧倾及翻滚动作的能力,大幅度提高了仿生水下机器人的运动灵活性,极大地提高了其环境适用性。
6.为了实现上述目的,本发明采用如下技术方案:一种仿莱氏拟乌贼及虾姑的水下多自由度运动机器人,包括头部机构、胸部机构及腹部机构;所述头部机构、胸部机构及腹部机构沿直线方向顺序布置;所述头部机构用于提供机器人快速推进的驱动力;所述胸部机构为箱式结构,在胸部机构的箱体内安装有控制器和电池;所述腹部机构用于提供机器人慢速推进的驱动力,且机器人在水中的悬停、纵向高度调整、侧倾及翻滚均通过腹部机构执行。
7.所述头部机构包括机器人快速推进执行组件和柔性外罩,所述机器人快速推进执行组件位于柔性外罩内部;所述机器人快速推进执行组件包括机器人快速推进执行电机、头部执行组件支撑底板、头部执行组件支撑筒、头部执行组件支撑顶板、主动齿轮、从动齿
轮及头部终端执行单元体;所述机器人快速推进执行电机通过壳体与胸部机构的箱体相固连,所述头部执行组件支撑底板固定连接在机器人快速推进执行电机的壳体上,所述头部执行组件支撑筒一端与头部执行组件支撑底板相固连,所述头部执行组件支撑顶板固连在头部执行组件支撑筒另一端,头部执行组件支撑顶板与头部执行组件支撑底板相平行,头部执行组件支撑筒与头部执行组件支撑顶板和头部执行组件支撑底板相垂直;所述主动齿轮位于头部执行组件支撑顶板外侧,主动齿轮与头部执行组件支撑顶板相平行,主动齿轮的中心齿轮轴通过轴承与头部执行组件支撑顶板相连,主动齿轮的中心齿轮轴位于头部执行组件支撑筒内部;所述机器人快速推进执行电机的电机轴与主动齿轮的中心齿轮轴同轴固连在一起;所述从动齿轮与主动齿轮相啮合,从动齿轮安装在头部终端执行单元体上,头部终端执行单元体连接在头部执行组件支撑底板与头部执行组件支撑顶板之间。
8.所述头部终端执行单元体的数量若干,若干头部终端执行单元体沿头部执行组件支撑筒周向均布设置,每个头部终端执行单元体上均配装有一个从动齿轮。
9.所述头部终端执行单元体包括头部执行组件曲轴、头部执行组件o型连杆、头部执行组件l型左摆杆及头部执行组件l型右摆杆;所述头部执行组件曲轴一端通过轴承与头部执行组件支撑底板相连接,头部执行组件曲轴另一端通过轴承与头部执行组件支撑顶板相连接,头部执行组件曲轴与头部执行组件支撑底板和头部执行组件支撑顶板相垂直;所述头部执行组件o型连杆通过内侧的o型孔套装在头部执行组件曲轴的偏心段;所述头部执行组件l型左摆杆的拐点处铰接在头部执行组件支撑顶板上,头部执行组件l型左摆杆的短支臂端部与头部执行组件o型连杆一端相铰接,头部执行组件l型左摆杆的长支臂为自由端;所述头部执行组件l型右摆杆的拐点处铰接在头部执行组件支撑顶板上,头部执行组件l型右摆杆的短支臂端部与头部执行组件o型连杆另一端相铰接,头部执行组件l型右摆杆的长支臂为自由端。
10.所述柔性外罩包括外罩顶板、外罩底板及柔性囊膜;所述外罩顶板与头部执行组件支撑顶板密封固连在一起;所述外罩底板与胸部机构的箱体密封固连在一起,外罩底板与外罩顶板相平行;所述柔性囊膜密封连接在外罩底板与外罩顶板之间;在所述外罩顶板中心开设有喷水孔,在喷水孔内安装有喷控水单向阀,喷控水单向阀的出水端朝外,喷控水单向阀的进水端朝内;在所述外罩底板上开设有若干吸水孔,在吸水孔内安装有吸控水单向阀,吸控水单向阀的出水端朝内,吸控水单向阀的进水端朝外;所述柔性囊膜与头部执行组件l型左摆杆和头部执行组件l型右摆杆的长支臂顶撑连接配合。
11.所述腹部机构包括腹部框架、仿乌贼肉鳍组件及仿虾姑游泳足组件;所述腹部框架采用双层结构,所述仿乌贼肉鳍组件设置在腹部框架的上层,所述仿虾姑游泳足组件设置在腹部框架的下层;所述仿乌贼肉鳍组件的数量为两组,两组仿乌贼肉鳍组件左右镜像对称分布;所述仿虾姑游泳足组件的数量为两组,两组仿虾姑游泳足组件左右并列分布。
12.所述仿乌贼肉鳍组件包括仿乌贼肉鳍运动执行电机、仿乌贼肉鳍运动执行曲轴、仿乌贼肉鳍运动执行光轴、仿乌贼肉鳍运动执行摆杆及仿乌贼肉鳍柔性膜;所述仿乌贼肉鳍运动执行电机通过壳体与胸部机构的箱体相固连;所述仿乌贼肉鳍运动执行曲轴两端通过轴承与腹部框架相连,所述仿乌贼肉鳍运动执行电机的电机轴与仿乌贼肉鳍运动执行曲轴一端同轴固连在一起;所述仿乌贼肉鳍运动执行光轴与仿乌贼肉鳍运动执行曲轴平行分布,仿乌贼肉鳍运动执行光轴两端与腹部框架固定连接;所述仿乌贼肉鳍运动执行摆杆采
用直线型结构,仿乌贼肉鳍运动执行摆杆依次分为直杆段、圆形孔段及o型孔段,仿乌贼肉鳍运动执行摆杆的o型孔段内侧的o型孔套装在仿乌贼肉鳍运动执行曲轴的偏心段,仿乌贼肉鳍运动执行摆杆的圆形孔段内侧的圆形孔通过轴承套装在仿乌贼肉鳍运动执行光轴上,仿乌贼肉鳍运动执行摆杆的直杆段为自由端并伸向腹部框架外侧;所述仿乌贼肉鳍柔性膜铺装在仿乌贼肉鳍运动执行摆杆的直杆段上。
13.所述仿乌贼肉鳍运动执行曲轴上等间距设置有若干偏心段,且所有相邻的偏心段均具有相同的相位角,每个偏心段与仿乌贼肉鳍运动执行光轴之间均设置有一根仿乌贼肉鳍运动执行摆杆。
14.所述仿虾姑游泳足组件包括仿虾姑游泳足运动执行电机、仿虾姑游泳足运动执行曲轴、仿虾姑游泳足运动执行o型连杆、仿虾姑游泳足运动执行旗型左摆杆、仿虾姑游泳足运动执行旗型右摆杆及仿虾姑游泳足拨水片;所述仿虾姑游泳足运动执行电机通过壳体与胸部机构的箱体相固连;所述仿虾姑游泳足运动执行曲轴两端通过轴承与腹部框架相连,仿虾姑游泳足运动执行电机的电机轴与仿虾姑游泳足运动执行曲轴一端同轴固连在一起;所述仿虾姑游泳足运动执行o型连杆通过内侧的o型孔套装在仿虾姑游泳足运动执行曲轴的偏心段;所述仿虾姑游泳足运动执行旗型左摆杆的三角旗面段顶端铰接在腹部框架上,仿虾姑游泳足运动执行旗型左摆杆的三角旗面段旗角端与仿虾姑游泳足运动执行o型连杆一端相铰接,仿虾姑游泳足运动执行旗型左摆杆的旗杆段为自由端;所述仿虾姑游泳足运动执行旗型右摆杆的三角旗面段顶端铰接在腹部框架上,仿虾姑游泳足运动执行旗型右摆杆的三角旗面段旗角端与仿虾姑游泳足运动执行o型连杆另一端相铰接,仿虾姑游泳足运动执行旗型右摆杆的旗杆段为自由端;所述仿虾姑游泳足拨水片连接在仿虾姑游泳足运动执行旗型左摆杆与仿虾姑游泳足运动执行旗型右摆杆的旗杆段之间。
15.所述仿虾姑游泳足运动执行曲轴上等间距设置有若干偏心段,且所有相邻的偏心段均具有相同的相位角,每个偏心段上均连接有一根仿虾姑游泳足运动执行o型连杆。
16.本发明的有益效果:
17.本发明的仿莱氏拟乌贼及虾姑的水下多自由度运动机器人,首次将莱氏拟乌贼及虾姑的仿生设计应用在同一台仿生水下机器人中,通过对莱氏拟乌贼的仿生设计,使水下机器人具备了快速推进移动的能力,通过对虾姑的仿生设计,弥补了传统正弦波等类似波形模式进行推进方案中垂直方向上运动自由度不足的缺陷,具备了在水中悬停以及进行纵向高度调整的能力,同时还具备了在水中完成侧倾及翻滚动作的能力,大幅度提高了仿生水下机器人的运动灵活性,极大地提高了其环境适用性。
附图说明
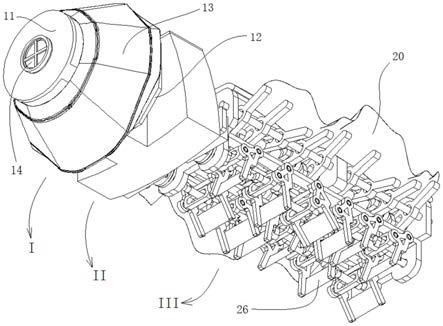
18.图1为本发明的仿莱氏拟乌贼及虾姑的水下多自由度运动机器人的结构示意图;
19.图2为本发明的仿莱氏拟乌贼及虾姑的水下多自由度运动机器人(头部机构的柔性外罩、腹部机构的仿乌贼肉鳍柔性膜及仿虾姑游泳足拨水片未示出)的结构示意图(视角一);
20.图3为本发明的仿莱氏拟乌贼及虾姑的水下多自由度运动机器人(头部机构的柔性外罩、腹部机构的仿乌贼肉鳍柔性膜及仿虾姑游泳足拨水片未示出)的结构示意图(视角二);
21.图中,i—头部机构,ii—胸部机构,iii—腹部机构,1—机器人快速推进执行电机,2—头部执行组件支撑底板,3—头部执行组件支撑筒,4—头部执行组件支撑顶板,5—主动齿轮,6—从动齿轮,7—头部执行组件曲轴,8—头部执行组件o型连杆,9—头部执行组件l型左摆杆,10—头部执行组件l型右摆杆,11—外罩顶板,12—外罩底板,13—柔性囊膜,14—喷水孔,15—腹部框架,16—仿乌贼肉鳍运动执行电机,17—仿乌贼肉鳍运动执行曲轴,18—仿乌贼肉鳍运动执行光轴,19—仿乌贼肉鳍运动执行摆杆,20—仿乌贼肉鳍柔性膜,21—仿虾姑游泳足运动执行电机,22—仿虾姑游泳足运动执行曲轴,23—仿虾姑游泳足运动执行o型连杆,24—仿虾姑游泳足运动执行旗型左摆杆,25—仿虾姑游泳足运动执行旗型右摆杆,26—仿虾姑游泳足拨水片。
具体实施方式
22.下面结合附图和具体实施例对本发明做进一步的详细说明。
23.如图1~3所示,一种仿莱氏拟乌贼及虾姑的水下多自由度运动机器人,包括头部机构i、胸部机构ii及腹部机构iii;所述头部机构i、胸部机构ii及腹部机构iii沿直线方向顺序布置;所述头部机构i用于提供机器人快速推进的驱动力;所述胸部机构ii为箱式结构,在胸部机构ii的箱体内安装有控制器和电池;所述腹部机构iii用于提供机器人慢速推进的驱动力,且机器人在水中的悬停、纵向高度调整、侧倾及翻滚均通过腹部机构iii执行。
24.所述头部机构i包括机器人快速推进执行组件和柔性外罩,所述机器人快速推进执行组件位于柔性外罩内部;所述机器人快速推进执行组件包括机器人快速推进执行电机1、头部执行组件支撑底板2、头部执行组件支撑筒3、头部执行组件支撑顶板4、主动齿轮5、从动齿轮6及头部终端执行单元体;所述机器人快速推进执行电机1通过壳体与胸部机构ii的箱体相固连,所述头部执行组件支撑底板2固定连接在机器人快速推进执行电机1的壳体上,所述头部执行组件支撑筒3一端与头部执行组件支撑底板2相固连,所述头部执行组件支撑顶板4固连在头部执行组件支撑筒3另一端,头部执行组件支撑顶板4与头部执行组件支撑底板2相平行,头部执行组件支撑筒3与头部执行组件支撑顶板4和头部执行组件支撑底板2相垂直;所述主动齿轮5位于头部执行组件支撑顶板4外侧,主动齿轮5与头部执行组件支撑顶板4相平行,主动齿轮5的中心齿轮轴通过轴承与头部执行组件支撑顶板4相连,主动齿轮5的中心齿轮轴位于头部执行组件支撑筒3内部;所述机器人快速推进执行电机1的电机轴与主动齿轮5的中心齿轮轴同轴固连在一起;所述从动齿轮6与主动齿轮5相啮合,从动齿轮6安装在头部终端执行单元体上,头部终端执行单元体连接在头部执行组件支撑底板2与头部执行组件支撑顶板4之间。
25.所述头部终端执行单元体的数量若干,若干头部终端执行单元体沿头部执行组件支撑筒3周向均布设置,每个头部终端执行单元体上均配装有一个从动齿轮6。本实施例中,头部终端执行单元体的数量为四个,从动齿轮6的数量为四个。
26.所述头部终端执行单元体包括头部执行组件曲轴7、头部执行组件o型连杆8、头部执行组件l型左摆杆9及头部执行组件l型右摆杆10;所述头部执行组件曲轴7一端通过轴承与头部执行组件支撑底板2相连接,头部执行组件曲轴7另一端通过轴承与头部执行组件支撑顶板4相连接,头部执行组件曲轴7与头部执行组件支撑底板2和头部执行组件支撑顶板4相垂直;所述头部执行组件o型连杆8通过内侧的o型孔套装在头部执行组件曲轴7的偏心
段;所述头部执行组件l型左摆杆9的拐点处铰接在头部执行组件支撑顶板4上,头部执行组件l型左摆杆9的短支臂端部与头部执行组件o型连杆8一端相铰接,头部执行组件l型左摆杆9的长支臂为自由端;所述头部执行组件l型右摆杆10的拐点处铰接在头部执行组件支撑顶板4上,头部执行组件l型右摆杆10的短支臂端部与头部执行组件o型连杆8另一端相铰接,头部执行组件l型右摆杆10的长支臂为自由端。
27.所述柔性外罩包括外罩顶板11、外罩底板12及柔性囊膜13;所述外罩顶板11与头部执行组件支撑顶板4密封固连在一起;所述外罩底板12与胸部机构ii的箱体密封固连在一起,外罩底板12与外罩顶板11相平行;所述柔性囊膜13密封连接在外罩底板12与外罩顶板11之间;在所述外罩顶板11中心开设有喷水孔14,在喷水孔14内安装有喷控水单向阀,喷控水单向阀的出水端朝外,喷控水单向阀的进水端朝内;在所述外罩底板12上开设有若干吸水孔,在吸水孔内安装有吸控水单向阀,吸控水单向阀的出水端朝内,吸控水单向阀的进水端朝外;所述柔性囊膜13与头部执行组件l型左摆杆9和头部执行组件l型右摆杆10的长支臂顶撑连接配合。
28.所述腹部机构iii包括腹部框架15、仿乌贼肉鳍组件及仿虾姑游泳足组件;所述腹部框架15采用双层结构,所述仿乌贼肉鳍组件设置在腹部框架15的上层,所述仿虾姑游泳足组件设置在腹部框架15的下层;所述仿乌贼肉鳍组件的数量为两组,两组仿乌贼肉鳍组件左右镜像对称分布;所述仿虾姑游泳足组件的数量为两组,两组仿虾姑游泳足组件左右并列分布。
29.所述仿乌贼肉鳍组件包括仿乌贼肉鳍运动执行电机16、仿乌贼肉鳍运动执行曲轴17、仿乌贼肉鳍运动执行光轴18、仿乌贼肉鳍运动执行摆杆19及仿乌贼肉鳍柔性膜20;所述仿乌贼肉鳍运动执行电机16通过壳体与胸部机构ii的箱体相固连;所述仿乌贼肉鳍运动执行曲轴17两端通过轴承与腹部框架15相连,所述仿乌贼肉鳍运动执行电机16的电机轴与仿乌贼肉鳍运动执行曲轴17一端同轴固连在一起;所述仿乌贼肉鳍运动执行光轴18与仿乌贼肉鳍运动执行曲轴17平行分布,仿乌贼肉鳍运动执行光轴18两端与腹部框架15固定连接;所述仿乌贼肉鳍运动执行摆杆19采用直线型结构,仿乌贼肉鳍运动执行摆杆19依次分为直杆段、圆形孔段及o型孔段,仿乌贼肉鳍运动执行摆杆19的o型孔段内侧的o型孔套装在仿乌贼肉鳍运动执行曲轴17的偏心段,仿乌贼肉鳍运动执行摆杆19的圆形孔段内侧的圆形孔通过轴承套装在仿乌贼肉鳍运动执行光轴18上,仿乌贼肉鳍运动执行摆杆19的直杆段为自由端并伸向腹部框架15外侧;所述仿乌贼肉鳍柔性膜20铺装在仿乌贼肉鳍运动执行摆杆19的直杆段上。
30.所述仿乌贼肉鳍运动执行曲轴17上等间距设置有若干偏心段,且所有相邻的偏心段均具有相同的相位角,每个偏心段与仿乌贼肉鳍运动执行光轴18之间均设置有一根仿乌贼肉鳍运动执行摆杆19。本实施例中,仿乌贼肉鳍运动执行曲轴17上等间距设置有九个偏心段,仿乌贼肉鳍运动执行摆杆19的数量也相应为九根。
31.所述仿虾姑游泳足组件包括仿虾姑游泳足运动执行电机21、仿虾姑游泳足运动执行曲轴22、仿虾姑游泳足运动执行o型连杆23、仿虾姑游泳足运动执行旗型左摆杆24、仿虾姑游泳足运动执行旗型右摆杆25及仿虾姑游泳足拨水片26;所述仿虾姑游泳足运动执行电机21通过壳体与胸部机构ii的箱体相固连;所述仿虾姑游泳足运动执行曲轴22两端通过轴承与腹部框架15相连,仿虾姑游泳足运动执行电机21的电机轴与仿虾姑游泳足运动执行曲
轴22一端同轴固连在一起;所述仿虾姑游泳足运动执行o型连杆23通过内侧的o型孔套装在仿虾姑游泳足运动执行曲轴22的偏心段;所述仿虾姑游泳足运动执行旗型左摆杆24的三角旗面段顶端铰接在腹部框架15上,仿虾姑游泳足运动执行旗型左摆杆24的三角旗面段旗角端与仿虾姑游泳足运动执行o型连杆23一端相铰接,仿虾姑游泳足运动执行旗型左摆杆24的旗杆段为自由端;所述仿虾姑游泳足运动执行旗型右摆杆25的三角旗面段顶端铰接在腹部框架15上,仿虾姑游泳足运动执行旗型右摆杆25的三角旗面段旗角端与仿虾姑游泳足运动执行o型连杆23另一端相铰接,仿虾姑游泳足运动执行旗型右摆杆25的旗杆段为自由端;所述仿虾姑游泳足拨水片26连接在仿虾姑游泳足运动执行旗型左摆杆24与仿虾姑游泳足运动执行旗型右摆杆25的旗杆段之间。
32.所述仿虾姑游泳足运动执行曲轴22上等间距设置有若干偏心段,且所有相邻的偏心段均具有相同的相位角,每个偏心段上均连接有一根仿虾姑游泳足运动执行o型连杆23。本实施例中,仿虾姑游泳足运动执行曲轴22上等间距设置有六个偏心段,仿虾姑游泳足运动执行o型连杆2的数量也相应为六根。
33.下面结合附图说明本发明的一次使用过程:
34.当机器人需要在水下快速推进时,首先启动机器人快速推进执行电机1,通过机器人快速推进执行电机1带动主动齿轮5转动,进而带动与之啮合的从动齿轮6转动,通过转动的从动齿轮6进一步带动头部执行组件曲轴7转动,转动的头部执行组件曲轴7会通过其偏心段带动头部执行组件o型连杆8往复移动,而往复移动的头部执行组件o型连杆8会带动头部执行组件l型左摆杆9及头部执行组件l型右摆杆10绕拐点处铰接轴往复摆动。
35.在头部执行组件l型左摆杆9及头部执行组件l型右摆杆10向外摆转过程中,摆杆的自由端会逐渐将柔性囊膜13撑大,使柔性囊膜13内部的体积逐渐变大,随着体积的增大,柔性囊膜13内部产生负压,在负压作用下,喷水孔14内的喷控水单向阀处于闭合状态,而吸水孔内的吸控水单向阀被顶开,环境内的水会通过吸水孔进入柔性囊膜13内部,吸水过程直到摆杆的自由端达到外摆极限为止。
36.当头部执行组件l型左摆杆9及头部执行组件l型右摆杆10的自由端从外摆极限位置向内摆转时,柔性囊膜13在自身弹性力作用下逐渐收缩,使柔性囊膜13内部的体积逐渐变小,随着体积的减小,柔性囊膜13收缩时会使其内部产生正压,在正压作用下,吸水孔内的吸控水单向阀处于闭合状态,喷水孔14内的喷控水单向阀被顶开,柔性囊膜13内部的水会通过喷水孔14高速喷出,喷水过程所产生的反作用力会推动机器人整体快速推进。
37.当机器人需要在水下慢速推进时,只需同步启动两组仿乌贼肉鳍组件内的仿乌贼肉鳍运动执行电机16即可,且两台仿乌贼肉鳍运动执行电机16的转向和转速保持相同,仿乌贼肉鳍运动执行电机16会带动仿乌贼肉鳍运动执行曲轴17转动,转动的仿乌贼肉鳍运动执行曲轴17则通过其偏心段带动仿乌贼肉鳍运动执行摆杆19绕仿乌贼肉鳍运动执行光轴18往复摆动,此时仿乌贼肉鳍柔性膜20便产生了类似正弦波的运动状态,进而由运动的仿乌贼肉鳍柔性膜20提供机器人水下慢速推进的驱动力。此外,在机器人执行水下慢速推进动作时,通过两台仿乌贼肉鳍运动执行电机16的转向调整,就可以实现机器人的前进和后退的转换。
38.当机器人执行水下慢速推进动作时需要转弯时,只需改变其中一台仿乌贼肉鳍运动执行电机16的转速,使两侧的仿乌贼肉鳍柔性膜20在运动时产生速度差,例如当左侧的
仿乌贼肉鳍柔性膜20运动速度慢,同时右侧的仿乌贼肉鳍柔性膜20运动速度快,则机器人整体就可以左转弯。反之同理,当右侧的仿乌贼肉鳍柔性膜20运动速度慢,同时左侧的仿乌贼肉鳍柔性膜20运动速度快,则机器人整体就可以右转弯。
39.当机器人需要在水下原地旋转时,也需要同步启动两组仿乌贼肉鳍组件的仿乌贼肉鳍运动执行电机16,且两台仿乌贼肉鳍运动执行电机16的转速需要保持相同,但两台仿乌贼肉鳍运动执行电机16的转向需要保持相反,此时左右两侧的仿乌贼肉鳍柔性膜20产生的驱动力相等且方向相反,进而就可以驱动机器人实现水下原地旋转。
40.当机器人需要在水下悬停和进行纵向高度调整时,只需同步启动两组仿虾姑游泳足组件内的仿虾姑游泳足运动执行电机21即可,且两台仿虾姑游泳足运动执行电机21的转向和转速保持相同,仿虾姑游泳足运动执行电机21会带动仿虾姑游泳足运动执行曲轴22转动,转动的仿虾姑游泳足运动执行曲轴22则通过其偏心段带动仿虾姑游泳足运动执行o型连杆23往复移动,而往复移动的仿虾姑游泳足运动执行o型连杆23会带动仿虾姑游泳足运动执行旗型左摆杆24和仿虾姑游泳足运动执行旗型右摆杆25绕三角旗面段顶端铰接轴往复摆动,最终带动仿虾姑游泳足拨水片26往复摆动,而往复摆动的仿虾姑游泳足拨水片26则用于产生向下的推力。
41.当机器人执行水下悬停动作时,只需调整仿虾姑游泳足运动执行电机21的转速,保证往复摆动的仿虾姑游泳足拨水片26所产生的向下推力与重力和浮力达到平衡状态即可。同理,也是通过调整仿虾姑游泳足运动执行电机21的转速,当往复摆动的仿虾姑游泳足拨水片26所产生的向下推力大于重力和浮力的合力时,机器人整体就可以进行上浮运动,反之当向下推力小于重力和浮力的合力时,则机器人整体就可以进行下潜运动。
42.当机器人需要在水下进行侧倾及翻滚时,只需同步启动两组仿虾姑游泳足组件内的仿虾姑游泳足运动执行电机21即可,且两台仿虾姑游泳足运动执行电机21的转向保持相同,但两台仿虾姑游泳足运动执行电机21的转速保持不同,而两台仿虾姑游泳足运动执行电机21因转速差便可以实现左右两侧仿虾姑游泳足拨水片26产生不同的向下推力,例如左侧的向下推力大,同时右侧的向下推力小,则机器人整体可以实现右倾或右旋翻滚,反之同理,当左侧的向下推力小,同时右侧的向下推力大时,则机器人整体可以实现左倾或左旋翻滚。
43.实施例中的方案并非用以限制本发明的专利保护范围,凡未脱离本发明所为的等效实施或变更,均包含于本案的专利范围中。