1.本技术涉及无人航行控制技术领域,特别涉及一种无人艇的航行控制方法、计算机可读存储介质及无人艇。
背景技术:
2.近年来,随着无人艇自主控制技术的快速发展,国内外无人艇的研发和应用逐渐呈现爆发式增长。无人艇主要应用于海洋勘测、侦察巡逻等任务,这对无人艇平台的稳定性和快速性有严苛的要求。目前,国内外主流的措施是通过主动减摇陀螺减少横摇角,但主动减摇陀螺对纵向减摇的效果不明显;并且,减摇陀螺占用舱内宝贵的布置空间并需要持续消耗能源;此外,减摇陀螺增加了艇体排水量,对无人艇的航行速度也不利。因此,有必要提供一种能够在低能源消耗的基础上有效减少无人艇纵摇角度的解决方案。
技术实现要素:
3.本技术实施例的目的在于提供一种无人艇的航行控制方法,旨在提供一种能够有效解决无人艇纵摇角度、降低能源消耗的解决方案。
4.本技术实施例是这样实现的,一种无人艇的航行控制方法,包括:
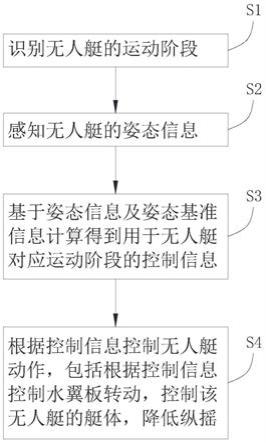
5.确认所述无人艇的运动阶段;
6.感知所述无人艇的姿态信息;
7.基于所述姿态信息及姿态基准信息计算所述无人艇在对应所述运动阶段的控制信息;以及
8.根据所述控制信息控制所述无人艇动作,包括:根据所述控制信息控制水翼板转动,通过所述水翼板的转动控制所述无人艇的艇体。
9.在一个实施例中,所述运动阶段包括起滑阶段、高速滑行阶段及波浪阶段中的至少一个;
10.所述姿态基准信息对应所述起滑阶段包括第一基准角度,所述姿态基准信息对应所述高速滑行阶段包括第二基准角度,所述姿态基准信息对应所述波浪阶段包括第三基准角度;
11.所述姿态信息包括所述无人艇的倾角;
12.所述计算所述无人艇的控制信息包括:获取所述姿态基准信息,通过比较对应所述运动阶段的所述姿态基准信息与所述姿态信息计算得到所述控制信息。
13.在一个实施例中,所述控制水翼板转动包括:控制组件根据所述控制信息控制驱动组件,所述驱动组件动作并控制所述水翼板转动。
14.在一个实施例中,所述确认所述无人艇的运动阶段包括:获取所述无人艇的航行速度,并比较所述航行速度与基准速度。
15.在一个实施例中,在所述起滑阶段,当所述无人艇的艉倾角大于所述第一基准角度时,所述控制组件根据第一控制信息控制所述驱动组件,所述驱动组件控制水翼板转动
并使船艏下倾。
16.在一个实施例中,在所述高速滑行阶段,当所述无人艇的艉倾角大于所述第二基准角度时,所述控制组件根据第二控制信息控制所述驱动组件,所述驱动组件控制水翼板转动并使船艏下倾;当所述无人艇的艏倾角大于第二基准角度时,所述控制组件根据第三控制信息控制所述驱动组件,所述驱动组件控制水翼板转动并使船艏上倾。
17.在一个实施例中,在所述波浪阶段,当所述无人艇的艉倾角度逐渐降低至所述第三基准角度时,所述控制组件根据第四控制信息控制所述驱动组件,所述驱动组件控制水翼板并使船艏上倾;当所述无人艇的艉倾角度逐渐增大至所述第三基准角度时,所述控制组件根据第五控制信息控制所述驱动组件,所述驱动组件控制水翼板转动并使船艏下倾。
18.在一个实施例中,所述姿态基准信息对应所述波浪阶段还包括第四基准角度,所述第四基准角度包括所述无人艇的倾角随波浪的周期性变化信息;当所述无人艇的所述姿态信息呈与所述第四基准角度一致时,所述控制组件确认所述无人艇处于所述波浪阶段。
19.本技术的另一目的在于提供一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时实现如上述各实施例所说的控制方法。
20.本技术的又一目的在于提供一种无人艇,包括如上述实施例所说的计算机可读存储介质,且通过上述各实施例所说的控制方法控制,包括艇体以及设于所述艇体上的水翼装置;所述水翼装置包括:
21.水翼板;
22.驱动组件;以及
23.控制组件,包括通过有线或无线方式连接的解算模块和惯性导航模块,所述惯性导航模块用于感知所述无人艇的姿态信息,所述解算模块用于接收所述姿态信息,比较所述姿态信息和所述姿态基准信息,并根据比较结果控制所述驱动组件,所述驱动组件用于根据所述解算模块的控制信息驱动所述水翼板转动。
24.本技术实施例提供的无人艇的航行控制方法、计算机可读存储介质和无人艇,其有益效果在于:
25.本技术实施例提供的无人艇的航行控制方法,包括确认所述无人艇的运动阶段、感知所述无人艇的姿态信息、基于所述姿态信息及姿态基准信息计算所述无人艇在对应所述运动阶段的控制信息,以及根据所述控制信息控制所述无人艇动作,包括根据所述控制信息控制水翼板转动,通过所述水翼板的转动控制所述无人艇动作并降低纵摇,能够有效降低该无人艇不同阶段的纵摇角度,保证航行过程整体的稳定性,能源消耗低。
附图说明
26.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
27.图1是本技术实施例提供的水翼装置的结构示意图;
28.图2是本技术实施例提供的无人艇的结构示意图;
29.图3是图2所示无人艇的控制路径示意图;
30.图4是本技术实施例提供的无人艇的控制方法的步骤示意图;
31.图5是本技术实施例提供的无人艇的控制方法中针对无人艇航行第一阶段的控制示意图;
32.图6是本技术实施例提供的无人艇的控制方法针对无人艇航行第二阶段的控制示意图;
33.图7是本技术实施例提供的无人艇的控制方法针对无人艇航行第三阶段的控制示意图。
34.图中标记的含义为:
35.200
‑
无人艇,9
‑
艇体,90
‑
槽道,91
‑
舟体,92
‑
中控器;
36.100
‑
水翼装置;
[0037]1‑
水翼板;
[0038]2‑
传动件,21
‑
第一传动轴,22
‑
第二传动轴,23
‑
第三传动轴;
[0039]3‑
动力件,31
‑
液压泵站,32
‑
电磁阀,33
‑
液压缸;
[0040]4‑
驱动组件;
[0041]5‑
控制组件,51
‑
解算模块,52
‑
惯性导航模块;
[0042]6‑
角度传感器。
具体实施方式
[0043]
为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本技术,并不用于限定本技术。
[0044]
需说明的是,当部件被称为“固定于”或“设置于”另一个部件,它可以直接或者间接固定或设置在该另一个部件上。当一个部件被称为是“连接于”另一个部件,它可以是直接或者间接连接至该另一个部件上。术语“上”、“下”、“左”、“右”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本专利的限制。术语“第一”、“第二”仅用于便于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明技术特征的数量。“多个”的含义是两个或两个以上,除非另有明确具体的限定。
[0045]
请参阅图1和图2,本技术实施例首先提供一种水翼装置100,其用于无人航行装置中,如无人艇200等,用于辅助该无人艇200进行艇体9的纵摇角度的调整。具体地,请结合参阅图1和图3,该水翼装置100包括水翼板1、驱动组件4和控制组件5,其中,控制组件5包括以有线连接或无线连接的方式实现通信连接的解算模块51和惯性导航模块52,惯性导航模块52用于感知无人艇200的姿态信息(图3中惯性导航模块52和艇体9之间的虚线箭头表示惯性导航模块52获取艇体9的姿态信息,其他实线箭头表示信息的传递方向),解算模块51用于接收来自惯性导航模块52的姿态信息,解算模块51内预存储有该无人艇200的姿态基准信息,解算模块51比较所接收的姿态信息和姿态基准信息,并根据比较结果控制驱动组件4,驱动组件4用于根据解算模块51的控制信息驱动水翼板1转动。
[0046]
水翼板1转动后,其与迎向无人艇200的来流(通常为水流)方向之间形成相应的夹角,该夹角即为水翼板1的攻角。根据攻角的不同,水流作用在水翼板1上的力的大小和方向
不同,从而能够使得无人艇200的纵摇角度作相应变化。例如,水翼板1转动后具有正攻角和负攻角,其中,负攻角时,水流作用于水翼板1的上表面,对水翼板1产生向下的作用力;正攻角时,来流作用于水翼板1的下表面,并对水翼板1产生向上的作用力。
[0047]
本技术实施例提供的水翼装置100中,惯性导航模块52用于感知无人艇200的姿态信息,解算模块51用于接收姿态信息,并用于比较姿态信息和姿态基准信息,还根据比较结果控制驱动组件4,驱动组件4进一步根据解算模块51的控制信息驱动水翼板1转动,以使得无人艇200的纵摇角度降低,并使得无人艇200航行过程中保持稳定;并且,水翼板1等设置在艇体9之外,不会占用舱内的空间;无人艇200的电能消耗也低。
[0048]
请参阅图1,水翼板1的迎向水流的一侧呈渐缩的锥状。这样设置的目的是,可以减少水翼板1与水流之间的阻力(除水流作用于水翼板1表面上的力之外的力),也有利于水翼板1的正攻角和负攻角之间的转换。
[0049]
请继续参阅图1和图3,在一个实施例中,驱动组件4包括相连接的动力件3和传动件2,动力件3与解算模块51连接,传动件2与水翼板1连接。动力件3用于在解算模块51的控制下输出动力,传动件2将动力进行方向转换后传递至水翼板1。
[0050]
具体地,本实施例中,如图1所示,动力件3包括依次连接的液压泵站31、电磁阀32和液压缸33,电磁阀32和液压缸33均与解算模块51连接,液压缸33还与传动件2连接。当电磁阀32和液压缸33接收到解算模块51的一控制信号后,电磁阀32打开,液压泵站31提供的液压油通过电磁阀32进入液压缸33,液压油作用于液压缸33,液压缸33的输出轴输出动力至传动件2;反过来,当电磁阀32和液压缸33接收到解算模块51的另一控制信号后,液压缸33反向动作,其输出轴输出反向动力,液压缸33的液压油通过电磁阀32进入液压泵站31。
[0051]
当然,不限于此,在其他可选实施例中,动力件3还可以有其他形式,如动力件3可以是电动动力结构件或空气动力结构件等。
[0052]
请继续参阅图1,在一个实施例中,传动件2包括相连接第一传动轴21和第二传动轴22,第一传动轴21与水翼板1连接,第二传动轴22与第一传动轴21连接,且第一传动轴21和第二传动轴22具有相同的转动中心轴线。液压缸33连接于第二传动轴22,并用于带动第二传动轴22转动,第二传动轴22带动第一传动轴21转动,从而,水翼板1被带动转动。
[0053]
在实际应用中,第一传动轴21和/或第二传动轴22转动安装在无人艇200的艇体9上,艇体9在允许第一传动轴21、第二传动轴22转动的同时还对第一传动轴21和第二传动轴22的位置起到大体固定的作用。
[0054]
如图1所示,根据液压缸33与第二传动轴22之间的具体位置关系,传动件2还可以包括连接在第二传动轴22和液压缸33之间的第三传动轴23。
[0055]
在一个实施例中,如图3所示,该水翼装置100还包括角度传感器6,其设于水翼板1上,并与解算模块51连接。角度传感器6用于监测水翼板1的角度(图3中水翼板1和角度传感器6之间的虚线箭头表示角度传感器6获取水翼板1的角度信息),并将水翼板1的角度信息传递至解算模块51。如此,解算模块51对水翼板1的控制形成了闭环,水翼板1的角度能够得到更为准确的控制,从而,该无人艇200的航行稳定性也进一步得以保证。
[0056]
如图2所示,本技术实施例还提供一种无人艇200,包括艇体9以及设于艇体9上的、如上述各实施例所说的水翼装置100。水翼装置100的特征可结合参考图1、图3以及参考上述各实施例所述,在此不再赘述。
[0057]
本技术实施例提供的无人艇200,其水翼装置100中,惯性导航模块52用于感知无人艇200的姿态信息,解算模块51用于接收姿态信息,并用于比较姿态信息和姿态基准信息,还根据比较结果控制驱动组件4,驱动组件4进一步根据解算模块51的控制信息驱动水翼板1转动,以使得无人艇200的纵摇角度降低,并使得无人艇200航行过程中保持稳定;并且,水翼板1等设置在艇体9之外,不会占用舱内的空间,电能消耗也低。
[0058]
上述所说的无人艇200可以是任何形式的艇。在本实施例中,如图2所示,该无人艇200为槽道船,也即为双体船,其底部有槽道90,槽道90两侧分别有一个单元舟体91。
[0059]
在该无人艇200中,至少水翼板1设于槽道90内。控制组件5可以设于艇体9内,也即舱内。驱动组件4也可以至少部分设于槽道90内,以与水翼板1直接连接,当然,根据需要,水翼板1和驱动组件4也可以设置在艇体9的侧面,如相对两侧。
[0060]
在其他可选实施例中,上述所说的无人艇200可以为单体船、三体船等。
[0061]
在一个实施例中,该无人艇200的槽道90内设有至少多个水翼装置100,且多个水翼装置100沿槽道90的延伸方向(从船艏至船艉方向)间隔排列。
[0062]
例如,本实施例中,如图2所示,槽道90内设有两个水翼装置100,其中一个水翼装置100相对靠近船艏,另一个水翼装置100相对靠近船艉。
[0063]
请结合参阅图3所示,无人艇200包括设于其艇体9内的中控器92,水翼装置100的控制组件5可与中控器92通信连接,以从中控器92获得相应的航行信息,如航行速度等,以进一步对无人艇200的航行过程进行控制(下文会具体描述)。
[0064]
可选地,控制组件5还可以将其所接受的信息以及对驱动组件4的控制信息等同时反馈至中控器92,以进行相应信息的存储或者是进一步反馈至服务器等以供操作人员查看,在此不再赘述。
[0065]
其中,控制组件5可以与中控器92独立设置,也可以与中控器92集成在一起。
[0066]
请结合参阅图3和图4,本技术实施例还提供一种用于上述的无人艇200的航行控制方法,包括:
[0067]
步骤s1,确认无人艇200的运动阶段;
[0068]
步骤s2,感知无人艇200的姿态信息;
[0069]
步骤s3,基于姿态信息及姿态基准信息计算得到用于无人艇200在对应运动阶段的控制信息;
[0070]
步骤s4,根据上述的控制信息控制无人艇200动作,包括根据控制信息控制水翼板1转动,通过水翼板1的转动控制该无人艇200的艇体9,并降低纵摇。
[0071]
具体地,结合其水翼装置100,则该控制方法具体是:控制组件5确认到该无人艇200的运动阶段;通过惯性导航模块52感知无人艇200的艇体9的姿态,惯性导航模块52将所感知的姿态信息传递至解算模块51,解算模块51比较姿态信息和姿态基准信息,并根据比较结果进行计算,得到用于该无人艇200在相对应的运动阶段的控制信息,然后,该解算模块51控制驱动组件4,驱动组件4根据解算模块51的控制相应地驱动水翼板1以降低无人艇200的艇体9的纵摇的方式转动。
[0072]
本技术实施例提供的无人艇200的航行控制方法,通过惯性导航模块52感知无人艇200的姿态信息,通过解算模块51接收姿态信息,并比较姿态信息和姿态基准信息,根据比较结果控制驱动组件4,驱动组件4进一步根据解算模块51的控制信息驱动水翼板1转动,
使得无人艇200的纵摇角度降低,航行稳定性提高,对无人艇200的电能消耗低,由于水翼板1等一部分结构设置在艇体9外,也减少了对舱内空间的占据。
[0073]
如上所述,根据该无人艇200在航行过程中不同航行阶段的航行稳定性需求,该航行控制方法同样具有不同的控制阶段。其中,所说的运动阶段包括起滑阶段、高速滑行阶段及波浪阶段中的至少一个。所说的姿态基准信息对应起滑阶段包括第一基准角度,对应高速滑行阶段包括第二基准角度,姿态基准信息对应波浪阶段包括第三基准角度。所说的姿态信息即包括无人艇200的倾角。上述说说的计算无人艇200的控制信息包括:获取姿态基准信息,通过比较对应运动阶段的姿态基准信息与实时所感知的姿态信息,计算得到该控制信息。
[0074]
在此,还需对无人艇200的艇体9的倾角作如下说明。
[0075]
无人艇200的艇体9的倾角以艏倾和艉倾来描述,其中,艏倾指的是船艏相对于船艉下倾、船艉相对于船艏上抬,艉倾指的是船艉相对于船艏下倾、船艏相对于船艉上抬。当船艉入水(船艉吃水深)时,以艉倾进行定义,当船艏入水(船艏吃水深)时,以艏倾进行定义。当然,该无人艇200整体为刚性装置,在船艏相对于水面的倾角变化的同时,船艉相对于水面的角度也同时变化。
[0076]
在一个实施例中,上述所说的确认无人艇200的运动阶段包括:获取该无人艇200的航行速度,并比较航行速度与基准速度信息。也即,在不同航行阶段,无人艇200具有不同的航行速度的特征,如数值范围、变化范围、变化趋势等,通过航行速度来判断该无人艇200处于何种运动阶段。
[0077]
以下,以无人艇200包括两个水翼装置100为例进行说明。其中一个水翼装置100相对靠近船艏,另一个水翼装置100相对靠近船艉。
[0078]
第一个阶段,该无人艇200的起滑阶段。在该起滑阶段,无人艇200的艇体9受迎向而来的水流作用而呈艉倾状态,且其需要保持艉倾状态才能快速地达到所需要的速度。上述的姿态基准信息包括第一基准角度,第一基准角度为艉倾a至0
°
,a大于0。如图5所示,在该起滑阶段,该控制方法包括:
[0079]
步骤s51,控制组件5确认该无人艇200处于起滑阶段,且解算模块51比较惯性导航模块52所感知到的无人艇200的艉倾角和第一基准角度;
[0080]
步骤s52,当无人艇200的艉倾角大于第一基准角度时,解算模块51得出用于该起滑阶段的第一控制信息;
[0081]
步骤s53,解算模块51根据第一控制信息控制驱动组件4,进而控制水翼板1。
[0082]
也即,当控制组件5确认该无人艇200处于起滑阶段,且当惯性导航模块52感知到的无人艇200的艉倾角大于第一基准角度时,解算模块51控制驱动组件4,驱动组件4控制水翼板1转动,并使船艏下倾,直至艇体9的艉倾角度降低并达到第一基准角度。
[0083]
具体是,当艉倾角度大于a时,解算模块51控制电磁阀32开启,并控制液压缸33工作,位于船艏的水翼装置100通过液压缸33的输出轴和传动件2控制水翼板1转动,使得靠近船艏的水翼板1产生负攻角,在艇体9的重心的前方产生一个向下的力;和/或,位于船艉的水翼装置100通过液压缸33的输出轴和传动件2控制水翼板1转动,使得船艉的水翼板1产生正攻角,在艇体9的重心的后方产生一个向上的力。作用于船艏的向下的力和作用于船艉的向上的力形成一个转动扭矩(埋艏扭矩),将艇体9的艉倾角度降低。
[0084]
设于水翼板1上的角度传感器6实时监测水翼板1的攻角的变化,并将水翼板1的角度信息反馈给解算模块51,解算模块51接收该角度信息,解算模块51根据该角度信息和惯性导航模块52所反馈的艇体9倾角信息进一步决定是否对水翼板1进行进一步控制,如此,该航行控制方法中对水翼板1的控制形成闭环。
[0085]
通过上述控制,使得艇体9的艉倾角度保持在a
°
以内(艉倾a
°
至0
°
)。这样能够提高艇体9的滑行效率,降低越峰阻力,使得该无人艇200能够越过起滑阶段的阻力峰并顺利起滑。
[0086]
在一个实施例中,a=2.5,第一基准角度为艉倾2.5
°
至0
°
。当然,根据具体需要,a也可以为一个数值范围,例如,a为大于0
°
且小于等于4
°
,第一基准角度为艉倾4
°
至0
°
,也即,当无人艇200的艉倾角度大于4
°
时,解算模块51对水翼板1进行上述控制,直至无人艇200的艉倾角在0
°
至4
°
之间;可选地,a为大于1
°
且小于2
°
,第一基准角度为艉倾1
°
至2
°
,也即,当无人艇200的艉倾角度大于2
°
时,解算模块51对水翼板1进行上述控制,直至无人艇200的艉倾角在1
°
至2
°
之间。
[0087]
在该实施例中,通过无人艇200的速度来确认无人艇200处于该起滑阶段具体包括:解算模块51从中控器92获取无人艇200此时的航行速度,并比较该航行速度与速度基准信息,当解算模块51确认该航行速度为第一基准速度时,可确认此时无人艇200处于起滑阶段。
[0088]
例如,第一基准速度可以为0至x,当解算模块51确认所获取、接收到该无人艇200的滑行速度为从0开始逐渐增大,并增大至x时,可以认为此时该无人艇200处于起滑阶段,从而,解算模块51可以对艇体9进行上述的控制。x的具体数值在此不作特别限定,具体根据无人艇200的类型和实用场景等进行限定。
[0089]
第二个阶段,无人艇200的高速滑行阶段。在该高速滑行阶段,无人艇200的艇体9也需要保持在艉倾状态才能稳定地进行高速滑行。上述的姿态基准信息包括第二基准角度,第一基准角度为艉倾b
°
至0
°
(b大于0)。
[0090]
如图6所示,在该高速航行阶段,该控制方法包括:
[0091]
步骤s61,控制组件5确认该无人艇200处于高速航行阶段,且解算模块51比较惯性导航模块52所感知到的无人艇200的艉倾角和第二基准角度;
[0092]
步骤s62,当无人艇200的艉倾角大于第二基准角度时,解算模块51得出用于该高速航行阶段的第二控制信息;或,当无人艇200的艉倾角度小于第二基准角度时,解算模块51得出用于该高速航行阶段的第三控制信息;
[0093]
步骤s63,解算模块51根据第二控制信息或第三控制信息控制驱动组件4,进而控制水翼板1。
[0094]
也即,当控制组件5确认该无人艇200处于高速滑行阶段,且当惯性导航模块52感知到的无人艇200的艉倾角大于第二基准角度时,解算模块51控制驱动组件4,驱动组件4控制水翼板1转动,并使船艏下倾。当控制组件5确认该无人艇200处于高速滑行阶段,且当惯性导航模块52感知到无人艇200的船艏倾角大于第二基准角度时,解算模块51控制驱动组件4,驱动组件4控制水翼板1转动,并使船艉下倾,直至恢复至艉倾b
°
至0
°
。
[0095]
具体是,当艉倾角度大于第二基准角度(艉倾大于b
°
)时,解算模块51控制电磁阀32开启,并控制液压缸33工作,位于船艏的水翼装置100通过液压缸33的输出轴和传动件2
控制水翼板1转动,使得船艏的水翼板1产生负攻角,在艇体9的重心的前方产生一个向下的力;和/或,位于船艉的水翼装置100通过液压缸33的输出轴和传动件2控制水翼板1转动,使得船艉的水翼板1产生正攻角,在艇体9的重心的后方产生一个向上的力。作用于船艏的向下的力和作用于船艉的向上的力形成一个转动扭矩(埋艏扭矩),将艇体9的艉倾角降低。
[0096]
具体是,当艉倾角度小于第二基准角度(艉倾小于0表示艇体9为艏倾,或者说艏倾角度大于第二基准角度(艏倾大于0
°
))时,解算模块51控制电磁阀32开启,并控制液压缸33工作,位于船艏的水翼装置100通过液压缸33的输出轴和传动件2控制水翼板1转动,使得船艏的水翼板1产生正攻角,在艇体9的重心的前方产生一个向上的力;位于船艉的水翼装置100通过液压缸33的输出轴和传动件2控制水翼板1转动,使得船艉的水翼板1产生负攻角,在艇体9的重心的后方产生一个下的力。作用于船艏的向上的力和作用于船艉的向下的力形成一个转动扭矩(抬艏扭矩),将艇体9的艉倾角增大,和/或艏倾角降低。
[0097]
同时,设于水翼板1上的角度传感器6实时监测水翼板1的攻角的变化,并将水翼板1的角度信息反馈给解算模块51,解算模块51接收该角度信息,解算模块51根据该角度信息和惯性导航模块52所反馈的艇体9的倾角信息进一步决定是否对水翼板1进行进一步控制,如此,该航行控制方法中对水翼板1的控制形成闭环。
[0098]
通过上述控制,使得艇体9的艉倾角度保持在b
°
至0
°
以内。这样能够提高艇体9在该阶段滑行稳定性,使得无人艇200保持稳定的航行速度。
[0099]
在一个实施例中,b为4
°
,第一基准角度为艉倾4
°
至0
°
。进一步地,当然,根据具体需要,b也可以为一个数值范围或者是其他具体数值,不再特别限定。
[0100]
在该实施例中,通过无人艇200的速度来确认无人艇200处于该高速滑行阶段具体包括:解算模块51从中控器92获取无人艇200此时的航行速度,并比较该航行速度与速度基准信息,当解算模块51确认该航行速度处于第二基准速度时,可确认此时无人艇200处于高速滑行阶段。
[0101]
例如,第二基准速度可以为y至z,当解算模块51确认所获取、接收到的该无人艇200的滑行速度在y至z之间时,可以认为此时该无人艇200处于高速航行阶段,从而,解算模块51可以对艇体9进行上述的控制。y和z的具体数值在此不作特别限定,具体根据无人艇200的类型和实用场景等进行限定。
[0102]
第三阶段,波浪阶段。该阶段表示无人艇200正遭遇波浪。当然,可以理解,该阶段是无人艇200在不同的海况下可能遭遇的阶段。
[0103]
在该波浪阶段,艇体9随着波浪的形状而起伏,其艇体9在艉倾和艏倾之间不断地、逐渐地变化,也即艇体9的倾角也大体呈周期性变化。但为了保证无人艇200的航行稳定性,其艇体9需要保持在艉倾状态为佳,船艏和船艉的连线与水平线平齐也可以,但至少不能船艏下倾。在该波浪阶段,上述的姿态基准信息包括第三基准角度。第三基准角度为艉倾c1~c2,c1大于c2,c2大于或等于0;或者,c1=c2≥0以使得第三基准角度为一个确定值也是可以的。可选地,c2>0。
[0104]
如图7所示,在该波浪阶段,该控制方法包括:
[0105]
步骤s71,控制组件5确认该无人艇200处于波浪阶段,且解算模块51比较惯性导航模块52所感知到的无人艇200的艉倾角和第三基准角度;
[0106]
步骤s72,当无人艇200的艉倾角度逐渐增大且大于第三基准角度之前,解算模块
51得出用于该波浪阶段的第四控制信息;或,当无人艇200的艉倾角度逐渐减小且小于第三基准角度之前,解算模块51得出用于该波浪阶段的第五控制信息;
[0107]
步骤s73,解算模块51根据第四控制信息或第五控制信息控制驱动组件4,进而控制水翼板1。
[0108]
也即,当控制组件5确认该无人艇200处于高速滑行阶段,且解算模块51通过分析惯性导航模块52输入的无人艇200姿态变化信息,根据艇体9当前的倾角来提前控制艇体9的下一阶段的倾角。也即,当控制组件5确认该无人艇200处于波浪阶段时,且惯性导航模块52感知到该艇体9的艉倾角度逐渐减小且小于第三基准角度(可以理解,若c1大于c2,则此时指小于c2)之前,即开始控制水翼装置100使得艇体9产生抬艏,从而使得下一阶段艇体9的艉倾增大至第三基准角度;在该艇体9的艉倾角度逐渐增大且大于第三基准角度(可以理解,若c1大于c2,则此时指大于c1)之前,即开始控制水翼装置100使得艇体9产生埋艏,从而使得下一阶段艇体9的艉倾降低至第三基准角度。艉倾c1和艉倾c2即为在该波浪阶段控制组件5开始实施该提前控制策略的时间节点。
[0109]
具体是,在无人艇200的艇体9的艉倾角度逐渐增大且大于第三基准角度之前,通过提前控制电磁阀32和液压缸33,并控制水翼板1,使得位于船艏和/或船艉的水翼装置100产生压艏转矩,降低抬艏,从而在下一阶段,艇体9的艉倾角度增大并保持在第三基准角度内;在无人艇200的艇体9的艉倾角度逐渐减小且小于第三基准角度之前,通过提前控制电磁阀32和液压缸33,并控制水翼板1,使得位于船艏和/或船艉的水翼装置100产生抬艏转矩,降低埋艏幅度,从而在下一阶段,艇体9可保持艉倾并保持在第三基准角度内。如此,可以保证艇体9的纵摇角度保持在一定范围内;同时,通过该控制,还可以降低艇体9在该波浪阶段的升沉幅值,抬升艇体9,降低艇体9的湿表面积和船艏砰击,减阻增效,提高航行效率。
[0110]
当惯性导航模块52感知到艇体9的艉倾角度逐渐降低时,解算模块51开始提前控制驱动组件4,以使得水翼装置100提前转动。
[0111]
在一个可选实施例中,当惯性导航模块52感知到艇体9的艉倾角度逐渐降低且艉倾角度为c2时,解算模块51控制驱动组件4,驱动组件4开始控制水翼板1转动并使船艏上倾、船艉下倾;如此,在下一阶段内,艇体9可以保持合适的艉倾角度。
[0112]
当惯性导航模块52感知到艇体9的艉倾角度逐渐增大时,解算模块51开始提前控制驱动组件4,以使得水翼装置100提前转动。
[0113]
在一个可选实施例中,当惯性导航模块52感知到艇体9的艏倾角度逐渐增大且艉倾角度为c1时,解算模块51开始控制驱动组件4,驱动组件4开始控制水翼板1转动并使船艏下倾、船艉上倾;如此,下一阶段内,艇体9可以保持合适的艉倾角度。
[0114]
在一个可选实施例中,上述的第三基准角度为艉倾3
°
~2.5
°
;在其他可选实施例中,上述的第三基准角度可以为3
°
或2.5
°
等具体数值。不限于此,在其他可选实施例中,上述的第三基准角度的数值或范围还可以根据实际需求而设定。
[0115]
可选地,在该实施例中,在波浪阶段,上述所说的确认无人艇200的航行阶段还可结合该无人艇200的倾角变化信息。也即,解算模块51存储的姿态基准信息还可包括第四基准角度,该第四基准角度为在无人艇200遭遇波浪时其倾角的周期性变化信息。也即,在波浪阶段,惯性导航模块52感知到艇体9在艉倾和艏倾之间不断地呈周期性变化,并将该艇体9的倾角的周期性变化信息反馈至解算模块51,解算模块51接收该倾角的周期性变化信息。
当解算模块51比较得出此时艇体9的倾角变化信息与第四基准角度一致后,即可确认无人艇200正处于波浪阶段,然后,解算模块51可以通过上述的提前控制策略对艇体9的倾角进行控制,以使得水翼装置100预转动。可以理解的是,上述所说的“一致”可以包括所接收的信息与第四基准角度中周期和幅度(倾角的值)均完全一致,也包括所接收的信息与第四基准角度中周期和/或幅度允许一定的偏差范围而趋于一致。
[0116]
其中,可选地,当解算模块51接收到无人艇200的倾角的一个周期的变化信息后,即可确认无人艇200正处于波浪阶段;或者,当解算模块51接收到无人艇200倾角的两个周期的变化信息后,即可确认无人艇200正处于波浪阶段。当然,在其他可选实施例中,当解算模块51接收到无人艇200的倾角的更多个周期的变化信息后,即可确认无人艇200正处于波浪阶段。具体可以根据实际需求
[0117]
在该实施例中,通过无人艇200的速度来确认无人艇200处于该波浪阶段具体包括:解算模块51从中控器92获取无人艇200此时的航行速度,并比较该航行速度与速度基准信息,当解算模块51确认该航行速度处于第三基准速度时,可确认此时无人艇200处于波浪阶段。
[0118]
例如,第三基准速度为无人艇200的速度值呈在一定的周期范围和幅值范围内周期性变化。当解算模块51接收到该无人艇200的航行速度也处于周期性变化时,也即与第三基准速度趋于一致(此处的“趋于一致”可参考上述描述)时,可以认为此时该无人艇200处于波浪阶段,从而,解算模块51可以对艇体9进行上述的控制。航行速度具体的周期性变化数值和范围在此不作特别限定,具体根据无人艇200的类型和实用场景等进行限定。
[0119]
本技术实施例还提供一种计算机可读存储介质,其应用于上述的无人艇200中。该计算机可读存储介质存储有计算机程序,该计算机程序被处理器执行时实现如上述各实施例所述的控制方法,从而通过该控制方法控制无人艇200的航行。
[0120]
以上所述仅为本技术的较佳实施例而已,并不用以限制本技术,凡在本技术的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本技术的保护范围之内。