1.本实用新型涉及一种用于减少船艇横摇运动的装置,特别是一种无人艇用减摇鳍的执行机构。
背景技术:
2.随着减摇鳍对船舶操纵性与耐波性的增强功能逐渐在国内被认知,减摇鳍已广泛应用于各类船舶当中;近年来随着智能化船舶的持续推进与发展,无人艇减摇鳍逐渐被市场所重视,与普通的中小型船舶不同,小型无人艇舱内空间小,吨位小,常规减摇鳍装置在普通的中小型船舶中有较为宽裕的布置空间和占用吨位,但在小型无人艇中,常规的减摇鳍装置在占舱空间上无法满足;同时常规减摇鳍通常采用一台驱动带一台鳍的方式,需要占用较多的调试调整的时间。
技术实现要素:
3.为了克服现有常规减摇鳍执行机构占舱空间大不利于无人艇减摇装置使用和布置,本实用新型提出一种新的无人艇减摇鳍执行机构,通过三个按一定角度布置的锥齿轮,将伺服电机的回转运动转变为两路转速大小相等,转动方向相反的两个回转运动,恰好能满足减摇鳍左右转鳍方向相反的工作需要。
4.为实现上述目的,本实用新型的技术方案是:一种基于锥齿轮传动的无人艇减摇鳍执行机构,包括伺服电机、减速器、锥齿轮组、电位器、传动轴、安装座、支承座,所述伺服电机通过减速器连接锥齿轮组,锥齿轮组中的主动锥齿轮与减速器输出轴固定连接,两个从动锥齿轮与主动锥齿轮啮合连接,两个从动锥齿轮分别通过传动轴连接无人艇减摇鳍。
5.进一步,所述传动轴与无人艇减摇鳍之间通过万向节连接。
6.进一步,所述万向节与穿过安装座的轴连接,轴末端连接无人艇减摇鳍。
7.进一步,两个所述从动锥齿轮呈一角度布置。
8.进一步,所述锥齿轮组安装于支承座上;所述支承座通过螺栓固定在无人艇底板。
9.进一步,所述伺服电机与减速器通过螺栓连接,并由键传递扭矩。
10.进一步,所述支承座上端面上装有电位器,所西安市电位器接收伺服电机带动减速器转动的位置信号,并将该位置信号输入电控系统,由电控系统输出控制信号给伺服电机,控制伺服电机带动减速器运动。
11.本实用新型的有益效果是:
12.本实用新型结构简化仅需一台伺服电机,大幅减少减摇鳍执行机构占舱空间;无需通过主动控制调节两台伺服电机保持同时以大小相等,方向相反的速度运转,简化了控制程序,降低了设备复杂性,减少了减摇鳍调试时间。
13.本实用新型通过引入两对锥齿轮传动,实现了通常由两个伺服电机驱动两个鳍到一个伺服电机驱动两个鳍的转变,大幅度降低了减摇鳍执行机构占舱空间,非常适应于无人艇对减摇装置占舱空间小的需求;无人艇减摇鳍的控制也由原来的控制两个伺服电机同
时反向旋转到仅需控制一个伺服电机正反转即可,大幅简化了控制程序,降低了设备复杂性减少了调试时间。
附图说明
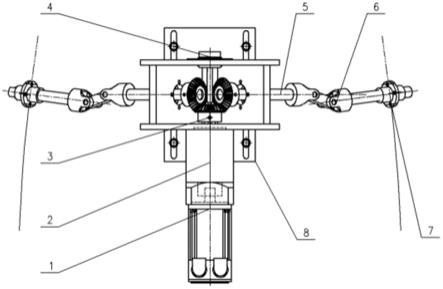
14.图1是本实用新型的无人艇减摇鳍执行机构结构示意图。
具体实施方式
15.下面结合附图与实施例对本实用新型作进一步说明。
16.如图1所示,本实用新型的无人艇减摇鳍执行机构,主要由伺服电机1、减速器2、锥齿轮组3、电位器4、传动轴5、万向节6、安装座7和支承座8等组成。伺服电机1与减速器2通过螺栓连接,并由键传递扭矩;减速器2输出轴与锥齿轮组3连接,锥齿轮组3安装于支承座8上;支承座8通过螺栓固定在无人艇底板;锥齿轮组3由三个按一定角度布置的锥齿轮,形成两对旋转副,其中,主动锥齿轮与减速器2输出轴固定连接,两个从动锥齿轮与主动锥齿轮啮合连接,两个从动锥齿轮呈一角度布置,两个从动锥齿轮分别通过传动轴5与万向节6连接;万向节6与穿过安装座7的轴连接,轴末端连接鳍,形成完整的传动链。
17.锥齿轮组3中三个按一定角度布置的锥齿轮,形成两对旋转副,通过设计的支承座保证锥齿轮的装配角度;同时为了简化减摇鳍执行机构与无人艇安装工艺,采用万向节连接锥齿轮与鳍。支承座8上端面上装有电位器4,电位器4接收伺服电机1带动减速器2转动的位置信号,并将该信号输入电控系统,电控系统的控制下驱动伺服电机1带动减速器2运动,减速器2与主动锥齿轮相连,通过两个从动锥齿轮将伺服电机1的旋转运动分解为两路速度大小相等方向相反的转鳍运动,从动锥齿轮通过传动轴5、万向节6与鳍相连,从而驱动鳍转鳍工作。
技术特征:
1.一种基于锥齿轮传动的无人艇减摇鳍执行机构,包括伺服电机、减速器、锥齿轮组、传动轴、安装座、支承座,其特征在于:所述伺服电机通过减速器连接锥齿轮组,锥齿轮组中的主动锥齿轮与减速器输出轴固定连接,两个从动锥齿轮与主动锥齿轮啮合连接,两个从动锥齿轮分别通过传动轴连接无人艇减摇鳍。2.根据权利要求1所述的基于锥齿轮传动的无人艇减摇鳍执行机构,其特征在于:所述传动轴与无人艇减摇鳍之间通过万向节连接。3.根据权利要求2所述的基于锥齿轮传动的无人艇减摇鳍执行机构,其特征在于:所述万向节与穿过安装座的轴连接,轴末端连接无人艇减摇鳍。4.根据权利要求1所述的基于锥齿轮传动的无人艇减摇鳍执行机构,其特征在于:两个所述从动锥齿轮呈一角度布置。5.根据权利要求1所述的基于锥齿轮传动的无人艇减摇鳍执行机构,其特征在于:所述锥齿轮组安装于支承座上;所述支承座通过螺栓固定在无人艇底板。6.根据权利要求1所述的基于锥齿轮传动的无人艇减摇鳍执行机构,其特征在于:所述伺服电机与减速器通过螺栓连接,并由键传递扭矩。7.根据权利要求1所述的基于锥齿轮传动的无人艇减摇鳍执行机构,其特征在于:所述支承座上端面上装有电位器,所西安市电位器接收伺服电机带动减速器转动的位置信号,并将该位置信号输入电控系统,由电控系统输出控制信号给伺服电机,控制伺服电机带动减速器运动。
技术总结
本实用新型涉及一种基于锥齿轮传动的无人艇减摇鳍执行机构,伺服电机通过减速器连接锥齿轮组,锥齿轮组中的主动锥齿轮与减速器输出轴固定连接,两个从动锥齿轮与主动锥齿轮啮合连接,两个从动锥齿轮分别通过传动轴连接无人艇减摇鳍。本实用新型通过引入两对锥齿轮传动,实现了通常由两个伺服电机驱动两个鳍到一个伺服电机驱动两个鳍的转变,大幅度降低了减摇鳍执行机构占舱空间,非常适应于无人艇对减摇装置占舱空间小的需求;无人艇减摇鳍的控制也由原来的控制两个伺服电机同时反向旋转到仅需控制一个伺服电机正反转即可,大幅简化了控制程序,降低了设备复杂性减少了调试时间。降低了设备复杂性减少了调试时间。降低了设备复杂性减少了调试时间。
技术研发人员:蒋衡捷 杨万富 杨奕 白庆虹
受保护的技术使用者:上海衡拓船舶设备有限公司
技术研发日:2021.03.29
技术公布日:2021/12/3