1.本发明属于机器人技术领域,特别涉及一种水上垃圾收集机器人。
背景技术:
2.在现代化建设过程中,人口的指数型增长与城镇化进程加快给水体环境造成了极大的压力,水上的垃圾严重的威胁到了生态的平衡和水上运输的发展,直接或间接的带来了经济上的损失。
3.我国水域覆盖面极广,贯彻东西南北,为了解决水上垃圾问题,多数地区解决小面积水域漂浮垃圾的方法仍采用人工打捞,大面积水域中往往依靠大型打捞船采用传送带打捞的方式治理,然而人工打捞存在效率低、耗时长等问题,打捞船又存在噪音大、耗资源等问题。
技术实现要素:
4.本发明的目的是针对现有技术中存在的上述问题,提供了一种水上垃圾收集机器人。
5.本发明的目的可通过下列技术方案来实现:一种水上垃圾收集机器人,其特征在于,包括船体以及设置在船体上的垃圾打捞模块、垃圾压缩模块、垃圾储存装置和船体推进装置,所述的船体推进装置用来控制船体的正常航行与转向,所述的垃圾打捞模块用于将垃圾打捞上来并投放到垃圾压缩模块上,所述的垃圾压缩模块用于压缩垃圾并把垃圾推入垃圾储存装置。
6.本发明的工作原理:船体在水面上航行,同时垃圾打捞模块将水面上的垃圾打捞上来,然后掉入到垃圾压缩模块中,垃圾压缩模块将打捞上来的垃圾进行压缩,然后推入到垃圾储存装置中,从而该发明能够在水面上航行且自动对水面上的垃圾进行打捞,取代了人工打捞,实现了自动打捞垃圾,提升了垃圾打捞的效率,并且通过垃圾压缩模块将垃圾进行压缩排水,使得垃圾体积以及重量减小,提高了垃圾储存装置的载荷量。
7.在上述的一种水上垃圾收集机器人,所述的船体由两个对称的小型船体连接组成,两个所述的小型船体靠内侧均设置有支撑挡板,所述的支撑挡板用于固定输送装置与垃圾压缩模块。
8.在上述的一种水上垃圾收集机器人,所述的垃圾打捞模块包括第一驱动装置、传动装置和输送装置,所述的第一驱动装置通过传动装置带动输送装置进行运转,所述的输送装置用来打捞垃圾并把打捞上来的垃圾输入到垃圾压缩模块中,所述的输送装置包括滚子链和设置在滚子链上的带板,所述的滚子链通过传动装置驱动,所述的带板上设置有筛孔以及组隔板。
9.在上述的一种水上垃圾收集机器人,所述的垃圾压缩模块包括第二驱动装置、丝杆、挤压板、挤压仓和挡板,所述的第二驱动装置与丝杆连接并用于带动丝杆进行旋转,所述的挤压板通过滚珠丝杆设置在丝杆上且可在丝杆上做往返直线运动,所述的挤压板用于
压缩挤压仓中的垃圾并将垃圾中的水从挡板上滤出,所述的挡板上设置有滤水孔。
10.在上述的一种水上垃圾收集机器人,所述的挤压仓底部设置有固定板和弹力板,所述的弹力板靠近挡板且弹力板通过弹力装置支撑,所述的垃圾储存装置通过支撑板固定在垃圾压缩模块的下方,所述的垃圾储存装置能向上抬升后抽离。
11.在上述的一种水上垃圾收集机器人,每个所述的支撑挡板上均设置有第一条形限位孔和第二条形限位孔,所述的第一条形限位孔用于供挡板插入,所述的第二条形限位孔用于搭接挤压板并且挤压板可以沿着第二条形限位孔的长度方向往复运动,所述的第一条形限位孔的长度方向与第二条形限位孔的长度方向相互垂直。
12.在上述的一种水上垃圾收集机器人,所述的船体上设置有水箱、水泵和太阳能蓄电池,所述的船体中间底部设置有连接柱。
13.与现有技术相比,本发明能够实现自动清理水上垃圾,实现水上垃圾的自动化代替人工打捞垃圾,提升了水上垃圾清理的效率,且垃圾载荷量高。
附图说明
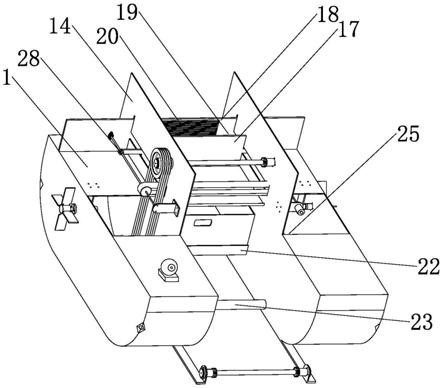
14.图1是本发明的整体结构立体示意图,
15.图2是本发明的俯视示意图,
16.图3是本发明的立体结构示意图,
17.图4是本发明的丝杆示意图,
18.图5是本发明的传动装置示意图,
19.图中,1、船体;2、打捞模块;3、垃圾压缩模块;4、垃圾储存模块;5、船体推进装置;6、第一驱动装置;7、传动装置;8、输送装置;9、滚子链;10、带板;11、筛孔;12、水泵;13、小型船体;14、支撑挡板;15、第二驱动装置;16、丝杆;17、挤压板;18、挡板;19、挤压仓;20、滤水孔;21、弹力板;22、支撑板;23、连接柱;24、水箱;25、太阳能蓄电池;26、固定板;27组隔板;28、滚珠丝杆;29、第一条形限位孔;30、第二条形限位孔。
具体实施方式
20.以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
21.如图1
‑
5所示,一种水上垃圾收集机器人,包括船体1以及设置在船体1上的垃圾打捞模块2、垃圾压缩模块3、垃圾储存装置4和船体推进装置5,船体推进装置5用来控制船体1的正常航行与转向,垃圾打捞模块2用于将垃圾打捞上来并投放到垃圾压缩模块3上,垃圾压缩模块3用于压缩垃圾并把垃圾推入垃圾储存装置4。
22.进一步细说,船体1由两个对称的小型船体13连接组成,两个小型船体13靠内侧均设置有支撑挡板14,支撑挡板14用于固定输送装置8与垃圾压缩模块3。本设置中输送装置8一端固定在支撑挡板14上且另一端固定在船体1的前沿底部,然后把垃圾从船体1前沿底部水面的垃圾打捞,带入到支撑挡板14上方,然后掉落到垃圾压缩模块3中进行压缩。
23.进一步细说,垃圾打捞模块2包括第一驱动装置6、传动装置7和输送装置8,第一驱动装置6通过传动装置7带动输送装置8进行运转,输送装置8用来打捞垃圾并把打捞上来的垃圾输入到垃圾压缩模块3中。本设置中第一驱动装置6带动传动装置7,传动装置7带动输
送装置8开始运转,输送装置8将水中的垃圾带入到垃圾压缩模块3中,便于下一步垃圾压缩。
24.进一步细说,输送装置8包括滚子链9和设置在滚子链9上的带板10,滚子链9通过传动装置7驱动,带板10上设置有筛孔11以及组隔板27。本设置中带板10安装在滚子链9上,跟随滚子链9进行运转,然后带板10将水中的垃圾带入到垃圾压缩模块3中,同时筛孔11用于去掉带板10上的水并且则组隔板27能够杜绝塑料瓶等较大垃圾从带板10滑落。
25.进一步细说,垃圾压缩模块3包括第二驱动装置15、丝杆16、挤压板17、挤压仓19和挡板18,第二驱动装置15与丝杆16连接并用于带动丝杆16进行旋转,挤压板17通过滚珠丝杆28设置在丝杆16上且可在丝杆16上做往返直线运动,挤压板17用于压缩挤压仓19中的垃圾并将垃圾中的水从挡板18上滤出,挡板18上设置有滤水孔20。本设置中第二驱动装置15驱动丝杆16旋转,同时同步带带动另一边丝杆16运动,最后通过滚珠丝杆28将旋转运动转为挤压板17在丝杆16上的直线运动,从而挤压板17压缩挤压仓19中的垃圾,然后垃圾紧贴挡板18,且垃圾中别挤出的水从挡板18上的滤水孔20中流出。
26.进一步细说,挤压仓19底部设置有固定板26和弹力板21,弹力板21靠近挡板18且弹力板21通过弹力装置支撑。本设置被挤压后的垃圾堆积到弹力板21上方,当堆积的垃圾重量达到一定量的时候,堆积的垃圾会压缩弹力板21,然后弹力板21打开,垃圾掉入垃圾储存装置4中。
27.进一步细说,垃圾储存装置4通过支撑板22固定在垃圾压缩模块3的下方,垃圾储存装置4能向上抬升后抽离。本设置中垃圾储存装置4通过支撑板22放置在垃圾压缩模块3的下方,且垃圾储存装置4可以向上抬升然后从垃圾压缩模块3与支撑板22之间抽离,以此便于将垃圾储存装置4中的垃圾倒出。
28.进一步细说,每个支撑挡板14上均设置有第一条形限位孔29和第二条形限位孔30,第一条形限位孔29用于供挡板18插入,第二条形限位孔30用于搭接挤压板17并且挤压板17可以沿着第二条形限位孔30的长度方向往复运动,第一条形限位孔29的长度方向与第二条形限位孔30的长度方向相互垂直。本设置中通过第一条形限位孔29使得挡板18被限位,同时因为第二条形限位孔30与第一条形限位孔29相互垂直,所以挤压板17可以沿着第二条形限位孔30的长度方向移动,从而将垃圾推向挡板18上,其中第二条形限位孔30能够为挤压板17提供方向上的限定,使得挤压板17移动呈直线型向挡板18移动,挤压垃圾的时候更加稳定。
29.进一步细说,船体1上设置有水箱24、水泵12和太阳能蓄电池25。本设置中通过水箱24以及水泵12便于控制船体1的排水量,太阳能蓄电池25为船体1提供电力,经济有效,通过连接柱23加强了船体1的连接以及牢固程度,使得船体1的使用寿命增加。
30.本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
31.尽管本文较多地使用了大量术语,但并不排除使用其它术语的可能性。使用这些术语仅仅是为了更方便地描述和解释本发明的本质;把它们解释成任何一种附加的限制都是与本发明精神相违背的。