1.本发明涉及洗衣机智能控制的技术领域,特别涉及基于永磁无刷电机驱动的洗衣机智能称重方法和系统。
背景技术:
2.洗衣机通常都设定有相应的洗衣极限重量,当洗衣机内部装载的衣物重量超过该洗衣极限重量,会导致洗衣机无法以正常转速运转,并且在运转过程中还会发生偏心旋转的情况。若洗衣机长期处于超重运转的工作状态,会对洗衣机内部的电机造成损坏。因此,在洗衣机工作之前需要确定其内部装载的衣物重量,并根据该衣物重量指示洗衣机进入合适的工作模式。现有技术都是在洗衣机的滚筒底部设置重量传感器,通过该重量传感器直接对装载的衣物进行称重。但是上述方式需要在滚筒内部额外布置重量传感器,并且重量传感器的重量检测灵敏度较低和重量检测范围较窄,这不仅增加洗衣机的制造成本,并且还无法准确地对衣物进行称重,从而影响洗衣机的正常工作。
技术实现要素:
3.针对现有技术存在的缺陷,本发明提供基于永磁无刷电机驱动的洗衣机智能称重方法和系统,其通过拍摄和分析洗衣机的运转工作影像,以此判断洗衣机是否能够平稳旋转以及对洗衣机进行自动调平;接着,获取洗衣机在空载状态和装载衣物状态下,其内部的永磁无刷电机从启动起到以额定转速工作过程中各自的电机启动用时,来确定永磁无刷电机上述两种状态下各自带动的重量,继而确定洗衣机装载衣物的重量;最后根据装载衣物的重量,确定洗衣机当前装载的衣物是否超重以及确定对洗衣机注入的水的重量,其利用洗衣机自带的永磁无刷电机分别对洗衣机在空载状态和装载衣物状态进行工作,以结合电机在两个不同状态下的加速用时来间接测量装载衣物的重量,从而在不需要额外设置重量传感器的情况下也能够快速和准确获得装载衣物的重量,以及提高衣物称重的可靠性和便捷性。
4.本发明提供基于永磁无刷电机驱动的洗衣机智能称重方法,其特征在于,其包括如下步骤:
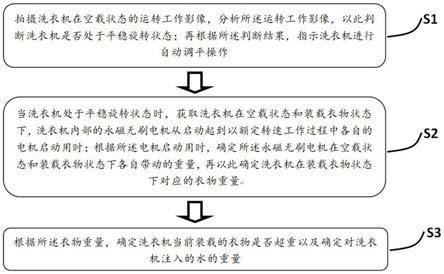
5.步骤s1,拍摄洗衣机在空载状态的运转工作影像,分析所述运转工作影像,以此判断洗衣机是否处于平稳旋转状态;再根据所述判断结果,指示洗衣机进行自动调平操作;
6.步骤s2,当洗衣机处于平稳旋转状态时,获取洗衣机在空载状态和装载衣物状态下,洗衣机内部的永磁无刷电机从启动起到以额定转速工作过程中各自的电机启动用时;根据所述电机启动用时,确定所述永磁无刷电机在空载状态和装载衣物状态下各自带动的重量,再以此确定洗衣机在装载衣物状态下对应的衣物重量;
7.步骤s3,根据所述衣物重量,确定洗衣机当前装载的衣物是否超重以及确定对洗衣机注入的水的重量;
8.进一步,在所述步骤s1中,拍摄洗衣机在空载状态的运转工作影像,分析所述运转
工作影像,以此判断洗衣机是否处于平稳旋转状态;再根据所述判断结果,指示洗衣机进行自动调平操作具体包括:
9.步骤s101,当洗衣机在空载状态下运转工作时,对洗衣机进行双目拍摄,以此获得洗衣机双目运转工作影像;根据所述洗衣机双目运转工作影像对应的双目影像视差,生成洗衣机三维运转工作影像;
10.步骤s102,对所述洗衣机三维运转工作影像进行识别,以此确定洗衣机在运转工作过程中于水平面上沿任意两个相互垂直方向上的摆动幅度值;
11.步骤s103,获取任意两个相互垂直方向上的摆动幅度值之间的幅度差值,将所述幅度差值与预设幅度差阈值进行比对,若所述幅度差值小于或者等于预设幅度差阈值,则确定洗衣机处于平稳旋转状态,否则,确定洗衣机不处于平稳旋转状态;当确定洗衣机不处于平稳旋转状态,指示洗衣机对滚筒进行俯仰角、偏航角和滚转角中任一者的调整,以此实现对洗衣机的自动调平操作;
12.进一步,在所述步骤s2中,当洗衣机处于平稳旋转状态时,获取洗衣机在空载状态和装载衣物状态下,洗衣机内部的永磁无刷电机从启动起到以额定转速工作过程中各自的电机启动用时;根据所述电机启动用时,确定所述永磁无刷电机在空载状态和装载衣物状态下各自带动的重量,再以此确定洗衣机在装载衣物状态下对应的衣物重量具体包括:
13.步骤s201,当洗衣机处于平稳旋转状态时,获取洗衣机在空载状态和装载衣物状态下,洗衣机内部的永磁无刷电机从静止状态起加速运转到以额定转速进行匀速旋转状态之间分别所需的加速用时,以此作为所述电机启动用时;
14.步骤s202,根据所述电机启动用时,确定洗衣机在空载状态和装载衣物状态下,洗衣机内部的永磁无刷电机从静止状态起加速运转到以额定转速进行匀速旋转状态分别对应的加速度;再根据所述加速度,确定所述永磁无刷电机在空载状态和装载衣物状态下各自带动的重量;
15.步骤s203,将所述永磁无刷电机在空载状态和装载衣物状态下各自带动的重量对应的重量差值,作为洗衣机在装载衣物状态下对应的衣物重量;
16.进一步,在所述步骤s202中,根据所述电机启动用时,确定洗衣机在空载状态和装载衣物状态下,洗衣机内部的永磁无刷电机从静止状态起加速运转到以额定转速进行匀速旋转状态分别对应的加速度;再根据所述加速度,确定所述永磁无刷电机在空载状态和装载衣物状态下各自带动的重量具体包括:
17.步骤s2021,利用下面公式(1),根据洗衣机在空载状态和装载衣物状态下,洗衣机内部的滚筒在永磁无刷电机驱动下从静止状态其加速运转到以额定转速进行匀速旋转状态分别对应所需的时间,以此得到滚筒在空载状态和装载衣物状态下,洗衣机内部的滚筒在永磁无刷电机驱动下从静止状态其加速运转到以额定转速进行匀速旋转状态分别对应角加速度,
[0018][0019]
在上述公式(1)中,ai表示第i个状态下洗衣机内部的滚筒的角加速度,i=1表示洗衣机当前处于空载状态,i=2表示洗衣机当前处于装载衣物状态;ω
max
表示洗衣机内部的滚筒的额定转动角速度,即洗衣机内部的永磁无刷电机达到额定转速时对应驱动滚筒的
转动角速度;θ0表示洗衣机内部的滚筒的转轴上的编码器在输出相邻两个编码脉冲是对应的永磁无刷电机的转动角度值;ni表示第i个状态下洗衣机内部的滚筒的转轴上的编码器当前输出的编码脉冲数量;t(ni)表示第i个状态下洗衣机内部的滚筒的转轴上的编码器当前输出第ni个编码脉冲对应的时刻;t(n
i-1)表示第i个状态下洗衣机内部的滚筒的转轴上编码其当前输出第n
i-1个编码脉冲对应的时刻;t0(i)表示第i个状态下永磁无刷电机开始启动运转的时刻;
[0020]
上述公式(1)具体含义为:洗衣机在转动过程中通过采集滚筒转轴上的编码器发出的编码脉冲的个数以及对应的编码脉冲发出时刻进行计算,当出现时,即洗衣机内部的永磁无刷电机从静止状态其加速运转到以额定转速进行匀速旋转状态,则记录此时t(n
i-1)-t0(i)对应的值、即为第i个状态下洗衣机内部的永磁无刷电机从静止状态其加速运转到以额定转速进行匀速旋转状态对应所需的时间;接着通过t(n
i-1)-t0(i)对应的值,计算出第i个状态下洗衣机内部的滚筒的角角速度ai,由于洗衣机内部的滚筒和永磁无刷电机是通过齿轮进行传动连接的,故洗衣机内部的永磁无刷电机的角加速度与滚筒的角加速度均为ai;
[0021]
步骤s2022,利用下面公式(2),根据洗衣机内部的永磁无刷电机的额定扭矩,以及其在空载状态下和装载衣物状态下,洗衣机内部的永磁无刷电机各自的角加速度,得到空载状态和装载衣物状态下永磁无刷电机的角动惯量,
[0022][0023]
在上述公式(2)中,ji表示第i个状态下永磁无刷电机的角动惯量;m
max
表示洗衣机内部的永磁无刷电机的额定扭矩;
[0024]
步骤s2023,利用下面公式(3),根据空载状态和装载衣物状态下永磁无刷电机的角动惯量,得到空载状态和装载衣物状态下永磁无刷电机各自带动重量,
[0025][0026]
在上述公式(3)中,gi表示第i个状态下永磁无刷电机的带动重量;r表示永磁无刷电机与洗衣机滚筒之间连接的齿轮中永磁无刷电机侧连接的齿轮分度圆半径;
[0027]
通过上述过程得到空载状态下永磁无刷电机带动重量g1,装载衣物状态下永磁无刷电机带动重量g2,则洗衣机在装载衣物状态下对应的衣物重量为g
2-g1;
[0028]
进一步,在所述步骤s3中,根据所述衣物重量,确定洗衣机当前装载的衣物是否超重以及确定对洗衣机注入的水的重量具体包括:
[0029]
步骤s301,将所述衣物重量与预设重量阈值进行比对,若所述衣物重量大于预设重量阈值,则确定洗衣机当前装载的衣物超重,否则,确定洗衣机当前装载的衣物不超重;
[0030]
步骤s302,当确定洗衣机当前装载的衣物超重时,指示洗衣机停止工作,并发出报警声音信号;
[0031]
步骤s303,当确定洗衣机当前装载的衣物不超重时,则预设衣物重量与洗涤用水量关系表,向洗衣机注入合适重量的水。
[0032]
本发明还提供基于永磁无刷电机驱动的洗衣机智能称重系统,其特征在于,其包
括洗衣机运转拍摄与分析模块,洗衣机调平模块,洗衣机装载衣物重量确定模块和洗衣机工作调整与注水控制模块;其中,
[0033]
所述洗衣机运转拍摄与分析模块用于拍摄洗衣机在空载状态的运转工作影像,分析所述运转工作影像,以此判断洗衣机是否处于平稳旋转状态;
[0034]
所述洗衣机调平模块用于根据所述判断结果,指示洗衣机进行自动调平操作;
[0035]
所述洗衣机装载衣物重量确定模块用于当洗衣机处于平稳旋转状态时,获取洗衣机在空载状态和装载衣物状态下,洗衣机内部的永磁无刷电机从启动起到以额定转速工作过程中各自的电机启动用时;根据所述电机启动用时,确定所述永磁无刷电机在空载状态和装载衣物状态下各自带动的重量,再以此确定洗衣机在装载衣物状态下对应的衣物重量;
[0036]
所述洗衣机工作调整与注水控制模块用于根据所述衣物重量,确定洗衣机当前装载的衣物是否超重以及确定对洗衣机注入的水的重量;
[0037]
进一步,所述洗衣机运转拍摄与分析模块拍摄洗衣机在空载状态的运转工作影像,分析所述运转工作影像,以此判断洗衣机是否处于平稳旋转状态具体包括:
[0038]
当洗衣机在空载状态下运转工作时,对洗衣机进行双目拍摄,以此获得洗衣机双目运转工作影像;根据所述洗衣机双目运转工作影像对应的双目影像视差,生成洗衣机三维运转工作影像;
[0039]
对所述洗衣机三维运转工作影像进行识别,以此确定洗衣机在运转工作过程中于水平面上沿任意两个相互垂直方向上的摆动幅度值;
[0040]
获取任意两个相互垂直方向上的摆动幅度值之间的幅度差值,将所述幅度差值与预设幅度差阈值进行比对,若所述幅度差值小于或者等于预设幅度差阈值,则确定洗衣机处于平稳旋转状态,否则,确定洗衣机不处于平稳旋转状态;
[0041]
以及,
[0042]
所述洗衣机调平模块根据所述判断结果,指示洗衣机进行自动调平操作具体包括:
[0043]
当确定洗衣机不处于平稳旋转状态,指示洗衣机对滚筒进行俯仰角、偏航角和滚转角中任一者的调整,以此实现对洗衣机的自动调平操作;
[0044]
进一步,所述洗衣机装载衣物重量确定模块当洗衣机处于平稳旋转状态时,获取洗衣机在空载状态和装载衣物状态下,洗衣机内部的永磁无刷电机从启动起到以额定转速工作过程中各自的电机启动用时;根据所述电机启动用时,确定所述永磁无刷电机在空载状态和装载衣物状态下各自带动的重量,再以此确定洗衣机在装载衣物状态下对应的衣物重量具体包括:
[0045]
当洗衣机处于平稳旋转状态时,获取洗衣机在空载状态和装载衣物状态下,洗衣机内部的永磁无刷电机从静止状态起加速运转到以额定转速进行匀速旋转状态之间分别所需的加速用时,以此作为所述电机启动用时;
[0046]
根据所述电机启动用时,确定洗衣机在空载状态和装载衣物状态下,洗衣机内部的永磁无刷电机从静止状态起加速运转到以额定转速进行匀速旋转状态分别对应的加速度;再根据所述加速度,确定所述永磁无刷电机在空载状态和装载衣物状态下各自带动的重量;
[0047]
将所述永磁无刷电机在空载状态和装载衣物状态下各自带动的重量对应的重量差值,作为洗衣机在装载衣物状态下对应的衣物重量;
[0048]
进一步,所述洗衣机工作调整与注水控制模块根据所述衣物重量,确定洗衣机当前装载的衣物是否超重以及确定对洗衣机注入的水的重量具体包括:
[0049]
将所述衣物重量与预设重量阈值进行比对,若所述衣物重量大于预设重量阈值,则确定洗衣机当前装载的衣物超重,否则,确定洗衣机当前装载的衣物不超重;
[0050]
当确定洗衣机当前装载的衣物超重时,指示洗衣机停止工作,并发出报警声音信号;
[0051]
当确定洗衣机当前装载的衣物不超重时,则预设衣物重量与洗涤用水量关系表,向洗衣机注入合适重量的水;
[0052]
进一步,在所述洗衣机智能称重系统中,永磁无刷电机的转子采用钕铁硼强磁体;当洗衣机工作时,所述钕铁硼强磁体能够反复进行正反转切换;所述永磁无刷电机的定子直接安装在洗衣机内滚筒的轴承座的主轴上,并且所述永磁无刷电机包括无变频其的驱动器来确定转子转动。
[0053]
相比于现有技术,该基于永磁无刷电机驱动的洗衣机智能称重方法和系统通过拍摄和分析洗衣机的运转工作影像,以此判断洗衣机是否能够平稳旋转以及对洗衣机进行自动调平;接着,获取洗衣机在空载状态和装载衣物状态下,其内部的永磁无刷电机从启动起到以额定转速工作过程中各自的电机启动用时,来确定永磁无刷电机上述两种状态下各自带动的重量,继而确定洗衣机装载衣物的重量;最后根据装载衣物的重量,确定洗衣机当前装载的衣物是否超重以及确定对洗衣机注入的水的重量,其利用洗衣机自带的永磁无刷电机分别对洗衣机在空载状态和装载衣物状态进行工作,以结合电机在两个不同状态下的加速用时来间接测量装载衣物的重量,从而在不需要额外设置重量传感器的情况下也能够快速和准确获得装载衣物的重量,以及提高衣物称重的可靠性和便捷性。
[0054]
本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
[0055]
下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
附图说明
[0056]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0057]
图1为本发明提供的基于永磁无刷电机驱动的洗衣机智能称重方法的流程示意图。
[0058]
图2为本发明提供的基于永磁无刷电机驱动的洗衣机智能称重系统的结构示意图。
[0059]
图3为本发明提供的基于永磁无刷电机驱动的洗衣机智能称重系统中永磁无刷电机的结构示意图。
[0060]
附图标记:1、电机固定受力点;2、传动主轴;3、轴承;4、电机主电源;5、无刷电机线圈;6、无刷电机散热固定支架;7、钕磁无刷电机外转子;8、电机外转子传动固定套。
具体实施方式
[0061]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0062]
参阅图1,为本发明实施例提供的基于永磁无刷电机驱动的洗衣机智能称重方法的流程示意图。该基于永磁无刷电机驱动的洗衣机智能称重方法包括如下步骤:
[0063]
步骤s1,拍摄洗衣机在空载状态的运转工作影像,分析该运转工作影像,以此判断洗衣机是否处于平稳旋转状态;再根据该判断结果,指示洗衣机进行自动调平操作;
[0064]
步骤s2,当洗衣机处于平稳旋转状态时,获取洗衣机在空载状态和装载衣物状态下,洗衣机内部的永磁无刷电机从启动起到以额定转速工作过程中各自的电机启动用时;根据该电机启动用时,确定该永磁无刷电机在空载状态和装载衣物状态下各自带动的重量,再以此确定洗衣机在装载衣物状态下对应的衣物重量;
[0065]
步骤s3,根据该衣物重量,确定洗衣机当前装载的衣物是否超重以及确定对洗衣机注入的水的重量。
[0066]
上述技术方案的有益效果为:该基于永磁无刷电机驱动的洗衣机智能称重方法通过拍摄和分析洗衣机的运转工作影像,以此判断洗衣机是否能够平稳旋转以及对洗衣机进行自动调平;接着,获取洗衣机在空载状态和装载衣物状态下,其内部的永磁无刷电机从启动起到以额定转速工作过程中各自的电机启动用时,来确定永磁无刷电机上述两种状态下各自带动的重量,继而确定洗衣机装载衣物的重量;最后根据装载衣物的重量,确定洗衣机当前装载的衣物是否超重以及确定对洗衣机注入的水的重量,其利用洗衣机自带的永磁无刷电机分别对洗衣机在空载状态和装载衣物状态进行工作,以结合电机在两个不同状态下的加速用时来间接测量装载衣物的重量,从而在不需要额外设置重量传感器的情况下也能够快速和准确获得装载衣物的重量,以及提高衣物称重的可靠性和便捷性。
[0067]
优选地,在该步骤s1中,拍摄洗衣机在空载状态的运转工作影像,分析该运转工作影像,以此判断洗衣机是否处于平稳旋转状态;再根据该判断结果,指示洗衣机进行自动调平操作具体包括:
[0068]
步骤s101,当洗衣机在空载状态下运转工作时,对洗衣机进行双目拍摄,以此获得洗衣机双目运转工作影像;根据该洗衣机双目运转工作影像对应的双目影像视差,生成洗衣机三维运转工作影像;
[0069]
步骤s102,对该洗衣机三维运转工作影像进行识别,以此确定洗衣机在运转工作过程中于水平面上沿任意两个相互垂直方向上的摆动幅度值;
[0070]
步骤s103,获取任意两个相互垂直方向上的摆动幅度值之间的幅度差值,将该幅度差值与预设幅度差阈值进行比对,若该幅度差值小于或者等于预设幅度差阈值,则确定洗衣机处于平稳旋转状态,否则,确定洗衣机不处于平稳旋转状态;当确定洗衣机不处于平稳旋转状态,指示洗衣机对滚筒进行俯仰角、偏航角和滚转角中任一者的调整,以此实现对
洗衣机的自动调平操作。
[0071]
上述技术方案的有益效果为:当洗衣机自身重心处于偏心状态时,该洗衣机的滚筒在旋转过程中会发生大幅度摆动,这种大幅度摆动不仅会对洗衣机内部的零部件产生冲击损坏,并且还会使洗衣机内部的永磁无刷电机长期处于超负荷的工作状态,从而严重影响洗衣机的正常工作。为此,通过对洗衣机在空载状态的运转工作过程进行双目拍摄,并根据拍摄得到的洗衣机双目运转工作影像,生成相应的洗衣机三维运转工作影像。接着对该洗衣机三维运转工作影像进行关于洗衣机边缘轮廓的识别处理,从而得到洗衣机在运转工作过程中于水平面上的摆动幅度值,若在任意两个相互垂直方向上的摆动幅度值之间的幅度差值大于预设幅度差阈值,则表明洗衣机在运转过程中其在水平面上的摆动幅度并不是均匀,这种不均匀摆动的状态正是洗衣机放置不平稳导致的偏心产生的,通过上述方式能够快速和准确地判断洗衣机是否处于平稳旋转状态,以便于后续有针对性地对洗衣机进行调平操作。在实际操作中,洗衣机的滚筒可通过若干调平支撑杆进行固定,当确定洗衣机不处于平稳旋转状态时,可以指示对应的调平支撑杆在六自由度方向上对滚筒的俯仰角、偏航角和滚转角中任一者的调整,从而使洗衣机进行调平。
[0072]
优选地,在该步骤s2中,当洗衣机处于平稳旋转状态时,获取洗衣机在空载状态和装载衣物状态下,洗衣机内部的永磁无刷电机从启动起到以额定转速工作过程中各自的电机启动用时;根据该电机启动用时,确定该永磁无刷电机在空载状态和装载衣物状态下各自带动的重量,再以此确定洗衣机在装载衣物状态下对应的衣物重量具体包括:
[0073]
步骤s201,当洗衣机处于平稳旋转状态时,获取洗衣机在空载状态和装载衣物状态下,洗衣机内部的永磁无刷电机从静止状态起加速运转到以额定转速进行匀速旋转状态之间分别所需的加速用时,以此作为该电机启动用时;
[0074]
步骤s202,根据该电机启动用时,确定洗衣机在空载状态和装载衣物状态下,洗衣机内部的永磁无刷电机从静止状态起加速运转到以额定转速进行匀速旋转状态分别对应的加速度;再根据该加速度,确定该永磁无刷电机在空载状态和装载衣物状态下各自带动的重量;
[0075]
步骤s203,将该永磁无刷电机在空载状态和装载衣物状态下各自带动的重量对应的重量差值,作为洗衣机在装载衣物状态下对应的衣物重量。
[0076]
上述技术方案的有益效果为:洗衣机的永磁无刷电机带动洗衣机的滚筒从静止状态加速运转到以额定转速进行匀速旋转状态完全是通过电机输出的力矩来实现的,当电机的工作参数不变,其输出的力矩也不变。但是在空载状态和装载衣物状态下,电机带动旋转的重量并不相应,这会导致带动滚筒旋转的加速度并不相同,相应地在空载状态和装载衣物状态下滚筒从静止状态加速运转到以额定转速进行匀速旋转状态所需要的加速时间也不相同。通过记录洗衣机在空载状态和装载衣物状态下对应的电机启动时间,并结合永磁无刷电机的力矩输出原理即可确定该永磁无刷电机在空载状态和装载衣物状态下各自带动的重量,继而进一步计算得到洗衣机在装载衣物状态下对应的衣物重量,这样能够在不需要设置重量传感器的情况下也可准确确定衣物重量。
[0077]
优选地,在该步骤s202中,根据该电机启动用时,确定洗衣机在空载状态和装载衣物状态下,洗衣机内部的永磁无刷电机从静止状态起加速运转到以额定转速进行匀速旋转状态分别对应的加速度;再根据该加速度,确定该永磁无刷电机在空载状态和装载衣物状
态下各自带动的重量具体包括:
[0078]
步骤s2021,利用下面公式(1),根据洗衣机在空载状态和装载衣物状态下,洗衣机内部的滚筒在永磁无刷电机驱动下从静止状态其加速运转到以额定转速进行匀速旋转状态分别对应所需的时间,以此得到滚筒在空载状态和装载衣物状态下,洗衣机内部的滚筒在永磁无刷电机驱动下从静止状态其加速运转到以额定转速进行匀速旋转状态分别对应角加速度,
[0079][0080]
在上述公式(1)中,ai表示第i个状态下洗衣机内部的滚筒的角加速度,i=1表示洗衣机当前处于空载状态,i=2表示洗衣机当前处于装载衣物状态;ω
max
表示洗衣机内部的滚筒的额定转动角速度,即洗衣机内部的永磁无刷电机达到额定转速时对应驱动滚筒的转动角速度;θ0表示洗衣机内部的滚筒的转轴上的编码器在输出相邻两个编码脉冲是对应的永磁无刷电机的转动角度值;ni表示第i个状态下洗衣机内部的滚筒的转轴上的编码器当前输出的编码脉冲数量;t(ni)表示第i个状态下洗衣机内部的滚筒的转轴上的编码器当前输出第ni个编码脉冲对应的时刻;t(n
i-1)表示第i个状态下洗衣机内部的滚筒的转轴上编码其当前输出第n
i-1个编码脉冲对应的时刻;t0(i)表示第i个状态下永磁无刷电机开始启动运转的时刻;
[0081]
上述公式(1)具体含义为:洗衣机在转动过程中通过采集滚筒转轴上的编码器发出的编码脉冲的个数以及对应的编码脉冲发出时刻进行计算,当出现时,即洗衣机内部的永磁无刷电机从静止状态其加速运转到以额定转速进行匀速旋转状态,则记录此时t(n
i-1)-t0(i)对应的值、即为第i个状态下洗衣机内部的永磁无刷电机从静止状态其加速运转到以额定转速进行匀速旋转状态对应所需的时间;接着通过t(n
i-1)-t0(i)对应的值,计算出第i个状态下洗衣机内部的滚筒的角角速度ai,由于洗衣机内部的滚筒和永磁无刷电机是通过齿轮进行传动连接的,故洗衣机内部的永磁无刷电机的角加速度与滚筒的角加速度均为ai;
[0082]
步骤s2022,利用下面公式(2),根据洗衣机内部的永磁无刷电机的额定扭矩,以及其在空载状态下和装载衣物状态下,洗衣机内部的永磁无刷电机各自的角加速度,得到空载状态和装载衣物状态下永磁无刷电机的角动惯量,
[0083][0084]
在上述公式(2)中,ji表示第i个状态下永磁无刷电机的角动惯量;m
max
表示洗衣机内部的永磁无刷电机的额定扭矩;
[0085]
步骤s2023,利用下面公式(3),根据空载状态和装载衣物状态下永磁无刷电机的角动惯量,得到空载状态和装载衣物状态下永磁无刷电机各自带动重量,
[0086][0087]
在上述公式(3)中,gi表示第i个状态下永磁无刷电机的带动重量;r表示永磁无刷电机与洗衣机滚筒之间连接的齿轮中永磁无刷电机侧连接的齿轮分度圆半径;
[0088]
通过上述过程得到空载状态下永磁无刷电机带动重量g1,装载衣物状态下永磁无刷电机带动重量g2,则洗衣机在装载衣物状态下对应的衣物重量为g
2-g1。
[0089]
上述技术方案的有益效果为:利用上述公式(1)根据洗衣机在空载状态或装载衣物状态下,洗衣机内部的转筒从静止状态起加速运转到转筒最大转速的时间,得到其空载状态和装载衣物状态下洗衣机内部的转筒的角加速度,进而以一种新的方式通过计算角加速度来计算出衣物重量,一是可以避开在老方法中洗衣机转筒下方安装压力传感器的复杂方法,因为洗衣机在旋转的过程中下方转轴处很难加装压力采集或重力采集装置,并且加装压力传感器采集到的重量还会受到转筒的质量或者旋转造成采集不准确的影响,通过计算角加速度可以在转轴处通过安装简易的编码器即简单又可靠,并且计算出的角加速度和最终的重量又准确,确保了装置的可靠性;再利用上述公式(2)根据洗衣机内部的永磁无刷电机的额定扭矩,以及其空载状态和装载衣物状态下洗衣机内部的永磁无刷电机的角加速度,得到空载状态和装载衣物状态下永磁无刷电机的角动惯量,目的是以角动惯量作为计算的中间物理量来将角加速度与永磁无刷电机带动的重量建立联系,最终求出永磁无刷电机带动的准确重量;最后利用上述公式(3)根据空载状态和装载衣物状态下永磁无刷电机的角动惯量,得到空载状态和装载衣物状态下所述永磁无刷电机的带动重量,通过求两个状态下永磁无刷电机的带动重量,目的是洗衣机中永磁无刷电机的带动重量包括:洗衣机转筒侧的齿轮、洗衣机转筒、洗衣机转筒的转轴、以及若转筒中存在衣物时衣物的重量,通过空载状态和装载衣物状态下两个带动重量作差即可将除转筒中衣物重量以外的其他重量全部消除掉,进而做到准确可靠的称重,确保了称重的可靠性以及准确性,并且在转筒转轴处安装编码器的成本以及复杂程度都要比在转轴处安装压力传感器和重力传感器的成本要少很多,节约了很大的资金成本以及人力安装成本。
[0090]
优选地,在该步骤s3中,根据该衣物重量,确定洗衣机当前装载的衣物是否超重以及确定对洗衣机注入的水的重量具体包括:
[0091]
步骤s301,将该衣物重量与预设重量阈值进行比对,若该衣物重量大于预设重量阈值,则确定洗衣机当前装载的衣物超重,否则,确定洗衣机当前装载的衣物不超重;
[0092]
步骤s302,当确定洗衣机当前装载的衣物超重时,指示洗衣机停止工作,并发出报警声音信号;
[0093]
步骤s303,当确定洗衣机当前装载的衣物不超重时,则预设衣物重量与洗涤用水量关系表,向洗衣机注入合适重量的水。
[0094]
上述技术方案的有益效果为:洗衣机都设置有洗衣极限重量,若洗衣机内部放置的衣物重量超过该洗衣极限重量,则洗衣机的滚筒将无法正常运转。通过将该衣物重量与预设重量阈值进行比对,能够判断洗衣机当前装载的衣物是否超重。同时不同衣物重量在洗涤过程中所需要的水量也是不同的,一般而言衣物重量越小,所需要的水量也越小。洗衣机中通常会预先设置不同衣物重量与洗涤用水量的对照关系数据,这样洗衣机能够根据该对照关系数据控制注水阀门的开关来向滚筒注入合适重量的水,从而有效地节省洗衣机的洗涤用水量。
[0095]
参阅图2,为本发明实施例提供的基于永磁无刷电机驱动的洗衣机智能称重系统的结构示意图。该基于永磁无刷电机驱动的洗衣机智能称重系统包括洗衣机运转拍摄与分析模块,洗衣机调平模块,洗衣机装载衣物重量确定模块和洗衣机工作调整与注水控制模
块;其中,
[0096]
该洗衣机运转拍摄与分析模块用于拍摄洗衣机在空载状态的运转工作影像,分析该运转工作影像,以此判断洗衣机是否处于平稳旋转状态;
[0097]
该洗衣机调平模块用于根据该判断结果,指示洗衣机进行自动调平操作;
[0098]
该洗衣机装载衣物重量确定模块用于当洗衣机处于平稳旋转状态时,获取洗衣机在空载状态和装载衣物状态下,洗衣机内部的永磁无刷电机从启动起到以额定转速工作过程中各自的电机启动用时;根据该电机启动用时,确定该永磁无刷电机在空载状态和装载衣物状态下各自带动的重量,再以此确定洗衣机在装载衣物状态下对应的衣物重量;
[0099]
该洗衣机工作调整与注水控制模块用于根据该衣物重量,确定洗衣机当前装载的衣物是否超重以及确定对洗衣机注入的水的重量。
[0100]
上述技术方案的有益效果为:该基于永磁无刷电机驱动的洗衣机智能称重系统通过拍摄和分析洗衣机的运转工作影像,以此判断洗衣机是否能够平稳旋转以及对洗衣机进行自动调平;接着,获取洗衣机在空载状态和装载衣物状态下,其内部的永磁无刷电机从启动起到以额定转速工作过程中各自的电机启动用时,来确定永磁无刷电机上述两种状态下各自带动的重量,继而确定洗衣机装载衣物的重量;最后根据装载衣物的重量,确定洗衣机当前装载的衣物是否超重以及确定对洗衣机注入的水的重量,其利用洗衣机自带的永磁无刷电机分别对洗衣机在空载状态和装载衣物状态进行工作,以结合电机在两个不同状态下的加速用时来间接测量装载衣物的重量,从而在不需要额外设置重量传感器的情况下也能够快速和准确获得装载衣物的重量,以及提高衣物称重的可靠性和便捷性。
[0101]
优选地,该洗衣机运转拍摄与分析模块拍摄洗衣机在空载状态的运转工作影像,分析该运转工作影像,以此判断洗衣机是否处于平稳旋转状态具体包括:
[0102]
当洗衣机在空载状态下运转工作时,对洗衣机进行双目拍摄,以此获得洗衣机双目运转工作影像;根据该洗衣机双目运转工作影像对应的双目影像视差,生成洗衣机三维运转工作影像;
[0103]
对该洗衣机三维运转工作影像进行识别,以此确定洗衣机在运转工作过程中于水平面上沿任意两个相互垂直方向上的摆动幅度值;
[0104]
获取任意两个相互垂直方向上的摆动幅度值之间的幅度差值,将该幅度差值与预设幅度差阈值进行比对,若该幅度差值小于或者等于预设幅度差阈值,则确定洗衣机处于平稳旋转状态,否则,确定洗衣机不处于平稳旋转状态;
[0105]
以及,
[0106]
该洗衣机调平模块根据该判断结果,指示洗衣机进行自动调平操作具体包括:
[0107]
当确定洗衣机不处于平稳旋转状态,指示洗衣机对滚筒进行俯仰角、偏航角和滚转角中任一者的调整,以此实现对洗衣机的自动调平操作。
[0108]
上述技术方案的有益效果为:当洗衣机自身重心处于偏心状态时,该洗衣机的滚筒在旋转过程中会发生大幅度摆动,这种大幅度摆动不仅会对洗衣机内部的零部件产生冲击损坏,并且还会使洗衣机内部的永磁无刷电机长期处于超负荷的工作状态,从而严重影响洗衣机的正常工作。为此,通过对洗衣机在空载状态的运转工作过程进行双目拍摄,并根据拍摄得到的洗衣机双目运转工作影像,生成相应的洗衣机三维运转工作影像。接着对该洗衣机三维运转工作影像进行关于洗衣机边缘轮廓的识别处理,从而得到洗衣机在运转工
作过程中于水平面上的摆动幅度值,若在任意两个相互垂直方向上的摆动幅度值之间的幅度差值大于预设幅度差阈值,则表明洗衣机在运转过程中其在水平面上的摆动幅度并不是均匀,这种不均匀摆动的状态正是洗衣机放置不平稳导致的偏心产生的,通过上述方式能够快速和准确地判断洗衣机是否处于平稳旋转状态,以便于后续有针对性地对洗衣机进行调平操作。在实际操作中,洗衣机的滚筒可通过若干调平支撑杆进行固定,当确定洗衣机不处于平稳旋转状态时,可以指示对应的调平支撑杆在六自由度方向上对滚筒的俯仰角、偏航角和滚转角中任一者的调整,从而使洗衣机进行调平。
[0109]
优选地,该洗衣机装载衣物重量确定模块当洗衣机处于平稳旋转状态时,获取洗衣机在空载状态和装载衣物状态下,洗衣机内部的永磁无刷电机从启动起到以额定转速工作过程中各自的电机启动用时;根据该电机启动用时,确定该永磁无刷电机在空载状态和装载衣物状态下各自带动的重量,再以此确定洗衣机在装载衣物状态下对应的衣物重量具体包括:
[0110]
当洗衣机处于平稳旋转状态时,获取洗衣机在空载状态和装载衣物状态下,洗衣机内部的永磁无刷电机从静止状态起加速运转到以额定转速进行匀速旋转状态之间分别所需的加速用时,以此作为该电机启动用时;
[0111]
根据该电机启动用时,确定洗衣机在空载状态和装载衣物状态下,洗衣机内部的永磁无刷电机从静止状态起加速运转到以额定转速进行匀速旋转状态分别对应的加速度;再根据该加速度,确定该永磁无刷电机在空载状态和装载衣物状态下各自带动的重量;
[0112]
将该永磁无刷电机在空载状态和装载衣物状态下各自带动的重量对应的重量差值,作为洗衣机在装载衣物状态下对应的衣物重量。
[0113]
上述技术方案的有益效果为:洗衣机的永磁无刷电机带动洗衣机的滚筒从静止状态加速运转到以额定转速进行匀速旋转状态完全是通过电机输出的力矩来实现的,当电机的工作参数不变,其输出的力矩也不变。但是在空载状态和装载衣物状态下,电机带动旋转的重量并不相应,这会导致带动滚筒旋转的加速度并不相同,相应地在空载状态和装载衣物状态下滚筒从静止状态加速运转到以额定转速进行匀速旋转状态所需要的加速时间也不相同。通过记录洗衣机在空载状态和装载衣物状态下对应的电机启动时间,并结合永磁无刷电机的力矩输出原理即可确定该永磁无刷电机在空载状态和装载衣物状态下各自带动的重量,继而进一步计算得到洗衣机在装载衣物状态下对应的衣物重量,这样能够在不需要设置重量传感器的情况下也可准确确定衣物重量。
[0114]
优选地,该洗衣机工作调整与注水控制模块根据该衣物重量,确定洗衣机当前装载的衣物是否超重以及确定对洗衣机注入的水的重量具体包括:
[0115]
将该衣物重量与预设重量阈值进行比对,若该衣物重量大于预设重量阈值,则确定洗衣机当前装载的衣物超重,否则,确定洗衣机当前装载的衣物不超重;
[0116]
当确定洗衣机当前装载的衣物超重时,指示洗衣机停止工作,并发出报警声音信号;
[0117]
当确定洗衣机当前装载的衣物不超重时,则预设衣物重量与洗涤用水量关系表,向洗衣机注入合适重量的水。
[0118]
上述技术方案的有益效果为:洗衣机都设置有洗衣极限重量,若洗衣机内部放置的衣物重量超过该洗衣极限重量,则洗衣机的滚筒将无法正常运转。通过将该衣物重量与
预设重量阈值进行比对,能够判断洗衣机当前装载的衣物是否超重。同时不同衣物重量在洗涤过程中所需要的水量也是不同的,一般而言衣物重量越小,所需要的水量也越小。洗衣机中通常会预先设置不同衣物重量与洗涤用水量的对照关系数据,这样洗衣机能够根据该对照关系数据控制注水阀门的开关来向滚筒注入合适重量的水,从而有效地节省洗衣机的洗涤用水量。
[0119]
优选地,在该洗衣机智能称重系统中,永磁无刷电机的转子采用钕铁硼强磁体;当洗衣机工作时,该钕铁硼强磁体能够反复进行正反转切换;该永磁无刷电机的定子直接安装在洗衣机内滚筒的轴承座的主轴上,并且该永磁无刷电机包括无变频其的驱动器来确定转子转动。
[0120]
上述技术方案的有益效果为:采用钕铁硼强磁体作为永磁无刷电机的转子,能够提高转子的功率密度、减小转子的体积和提高转子的结构紧凑性,并且该永磁无刷电机的起动转矩较大、效率高和具有良好的节能效果。此外,将该永磁无刷电机的定子直接安装在洗衣机内滚筒轴承座的主轴上,其安装简单、快捷以及提高洗衣机的生产效率,同时还省去了皮带轮、皮带和电机安装座等零部件,从而使永磁无刷电机的体积小、结构紧凑和大大节省电机生产的原材料和成本。还有,该永磁无刷电机采用专用的驱动器来驱动转子转动,该专有的驱动器省去了通用变频器,从而降低电机的生产成本。
[0121]
参阅图3,为本发明提供的基于永磁无刷电机驱动的洗衣机智能称重系统中永磁无刷电机的结构示意图。该永磁无刷电机由下至上包括电机固定受力点1、传动主轴2、轴承3、无刷电机线圈5、无刷电机散热固定支架6、钕磁无刷电机外转子7、电机外转子传动固定套8和免键轴套(图中未示出)。该传动主轴2固定设置在该电机固定受力点1上,该轴承3套设在该传动主轴2上,该无刷电机线圈5套设在该轴承3的外周,并且该无刷电机线圈5上设置有电机主电源4,该电机主电源4用于对该无刷电机线圈5进行供电;该无刷电机散热固定支架6设置在该轴承3与该无刷电机线圈5之间的区域,其用于对无刷电机线圈5进行散热,该钕磁无刷电机外转子7罩设在该无刷电机线圈5的上部,其能够在该无刷电机线圈5的作用下进行转动,该电机外转子传动固定套8设置在该钕磁无刷电机外转子7的转动轴线上,其能够在该钕磁无刷电机外转子7的带动下进行转动,该免键轴套则与该电机外转子传动固定套8连接,这样能够简化该永磁无刷电机的内部结构和降低其生产成本。
[0122]
从上述实施例的内容可知,该基于永磁无刷电机驱动的洗衣机智能称重方法和系统通过拍摄和分析洗衣机的运转工作影像,以此判断洗衣机是否能够平稳旋转以及对洗衣机进行自动调平;接着,获取洗衣机在空载状态和装载衣物状态下,其内部的永磁无刷电机从启动起到以额定转速工作过程中各自的电机启动用时,来确定永磁无刷电机上述两种状态下各自带动的重量,继而确定洗衣机装载衣物的重量;最后根据装载衣物的重量,确定洗衣机当前装载的衣物是否超重以及确定对洗衣机注入的水的重量,其利用洗衣机自带的永磁无刷电机分别对洗衣机在空载状态和装载衣物状态进行工作,以结合电机在两个不同状态下的加速用时来间接测量装载衣物的重量,从而在不需要额外设置重量传感器的情况下也能够快速和准确获得装载衣物的重量,以及提高衣物称重的可靠性和便捷性。
[0123]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。