1.本发明涉及一种伸缩式特殊人群出行辅助设备,属于拐杖结构改进技术领域。
背景技术:
2.截至2017年底,中国60岁以上老年人口已经达到2.409亿,占总人口的17.3%;世界卫生组织(简称世卫组织)于国际老年人日(10月1日)发布的最新报告,60岁以上人口预计将于2050年达到现在的两倍;中国老年人护理技术及辅助器具展览会的工作报告显示,70岁以上的老年人中有72.8%使用拐杖;中华人民共和国国家统计局报告指出身体不太健康但是生活可以自理的老人约有939万,约占53%。预计到 2020 年中国老年消费市场的规模将达到3.3万亿元。
3.与旺盛的市场需求和老年人的消费愿望相比,中国相关企业的行动显得相当滞后,国内致力于生产拐杖的集团其中优秀拐杖品牌有鱼跃、方太、康发、优康德、互邦、泰康、康祝、凯洋和新城彩虹大药房等,但其均是生产医疗器械方面,而对于一般老年人出行需求,并没有成型的品牌。
4.中国目前的老年人消费市场还不是很成熟,老年产品相对较少,远远不能满足需求,所以对老年产品的开发和研究有着广阔的前景,且以老年人为消费者的银色市场的开发会在很大程度上提高我国居民的消费指数,对在当前经济形势下扩大内需也有着重大的意义。
5.目前常见的拐杖都是普通拐杖,老年人存在诸多问题,比如腰不好等情况,当他的拐杖倒地时他是没有弯腰捡起拐杖的能力的,并且这个市面上的绝大部分的拐杖并不具备这种自动站立的功能,在专利库所检索到仅有一款通过不倒翁原理设计的自动站立拐杖,但该拐杖理论的重量过大,导致新的问题,即因为重力过大而老年人无法正常使用。本发明从这个角度出发,力求研究一款满足老年人正常使用的自动站立拐杖。因此,本发明是有实际价值作用的。
技术实现要素:
6.本发明提供一种伸缩式特殊人群出行辅助设备,其目的在于通过对拐杖结构设计的改进,巧妙地综合运用了物理原理,通过微型吸气泵及微型充气泵的作用往拐杖内部吸气及排气,通过气压的作用增长及收缩伸缩杆,改变拐杖在倒地时形成的杠杆模型的力矩及力臂,在不增加拐杖重量的原则上使得拐杖在倒地时能自动站立,合理最优状态分配受力,使其能够保持稳定直立状态,省去了老人弯腰捡拐杖的麻烦,同时在满足基础功能的情况下增加了led照明灯,满足老人夜间出行的需要,具有实际应用价值。
7.本发明采用的技术方案是:一种伸缩式特殊人群出行辅助设备,其特征在于:包括手柄、伸缩杆、圆台底座、光照传感器、单片机、微型充气泵、微型吸气泵、双通电控阀门、led照明灯、蓄电池、重力传感器、充电口、控制开关,手柄下端与伸缩杆上顶部结构连接并固定,伸缩杆底部与圆台底座顶部结构连接并固定,控制开关设置在手柄侧面不影响握持的
位置,光照传感器和充电口设置在圆台底座外侧并固定,微型充气泵、微型吸气泵、双通电控阀门固定在圆台底座的承托台上,微型充气泵、微型吸气泵、双通电控阀门呈直线布置,微型充气泵、微型吸气泵在两端,双通电控阀门在正中,微型充气泵与微型吸气泵均有两个通道,一个和外界连接的通道一个和双通电控阀门连接的通道,与外界连接的通道管道固定圆台底座上,保留通道口,此通道设置有滤网,防止灰尘进入杆体内部,双通电控阀门有三个通道,两个分别与微型充气泵和微型吸气泵连接,连接方式均为固定连接,相对不能运动,一个与拐杖内部连通,拐杖内部为中空结构,可实现内外气体吸进排出,单片机、蓄电池、重力传感器固定在圆台底座的底部平面上,位于微型充气泵、微型吸气泵、双通电控阀门的下方,单片机、蓄电池、重力传感器与微型充气泵、微型吸气泵、双通电控阀门无接触,led照明灯为弧形片状结构,沿圆台底座外侧设置,沿圆台底座外侧环绕一圈无缝接触并固定,光照传感器、微型充气泵、微型吸气泵、双通电控阀门、led照明灯、重力传感器均与单片机有线连接并受其控制,拐杖倒地时,在以拐杖上圆台底座与地面接触的支撑点为基点的力矩模型中,开始的时候支撑点左端,即靠近圆台底座的底部平面端的质量大,但与圆台底座与地面接触的支撑点的距离短,即力臂短,力矩模型中支撑点右端,即靠近手柄的一端,这一端的质量小,但与圆台底座与地面接触的支撑点的距离长,此时左端悬空,右端接触地面,力矩模型平衡,但在气泵的作用下,伸缩杆从以圆台底座与地面接触的支撑点的右端进入左端,进而左端质量增大而右端质量减小,同时由于伸缩杆的收缩,左端的力臂不变,右端的力臂随着伸缩杆的收缩逐步变短,在伸缩杆收缩完成后,此时的力矩模型已经改变,与原模型相比,新模型左端的质量变大且力臂不变,右端的质量与力臂均变小,原有模型稳定被破坏,以圆台底座与地面接触的支撑点为基点的杠杆模型中原平衡为右端大进而与地面接触,此时变为左边大进而与地面接触,而设置的圆台底座为碗状,即侧面为弧形,此时左端下降右端上升,拐杖顺着圆台底座侧面的弧形站立起来,而底部为平面结构,拐杖站立稳定。
8.进一步的,所述的圆台底座内部固定微型充气泵、微型吸气泵和双通电控阀门的承托台,该承托台位于拐杖倒地时手柄与圆台底座两个支撑点其中圆台底座上支撑点的左边,也就是以该支撑点为中心,圆台底座上底部平台的一端,其目的是为了增加在拐杖倒地时以拐杖上圆台底座支撑点为基点形成的杠杆圆台底座一端的质量,这样的话便于拐杖沿圆台底座外侧弧形站立。
9.进一步的,双通电控阀门三个通道中,顶部通道无控制开关,该通道一直处于打开状态,下部两端通道均有电控阀门进行控制,可开启及关闭,微型充气泵及微型吸气泵的两端均无控制阀门,通道一直处于打开状态,但由于微型充气泵及微型吸气泵均有与双通电控阀门连接的通道,故微型充气泵及微型吸气泵通道是否打开的最终效果由双通电控阀门决定。
10.进一步的,拐杖杆体密闭,在单片机对微型充气泵、微型吸气泵、双通电控阀门的控制下,实现气体吸进及排出。
11.进一步的,当伸缩杆处于伸展状态时,内部空气多,当伸缩杆处于收缩状态时,内部空气少。
12.进一步的,所述的手柄顶部手握处外侧还设置有红外触摸传感器,红外触摸传感器与单片机有线连接并受单片机控制。
13.进一步的,由于工作时伸缩杆会进行伸缩,故红外触摸传感器和控制开关与单片机连接的线路长度大于伸缩杆长度,保证在伸缩杆处于完全伸展状态,即杆体最长时线路长度依然够用。
14.进一步的,红外触摸传感器能对是否有人握有手把进行检测,当红外触摸传感器检测到有热源触摸,则说明此时有人在使用拐杖。
15.进一步的,当有人使用拐杖时,这个信息会传递给单片机,红外触摸传感器与重力传感器构成判断拐杖是否工作的检测端,单片机进行控制的依据就是红外触摸传感器与重力传感器检测的数据,进而单片机会根据这个信息以及角度信息对气泵进行控制。
16.进一步的,所述的红外触摸传感器、重力传感器、微型充气泵、微型吸气泵、双通电控阀门、单片机构成该装置的主体,即实现拐杖伸缩控制功能。
17.进一步的,当装置工作时,首先通过红外触摸传感器检测使用者状态,即是否有使用者,重力传感器检测拐杖与地面角度信息,共四种状态:无使用者且与地面角度达到给定阈值、无使用者且与地面角度未达到给定阈值、有使用者且与地面角度达到给定阈值、有使用者且与地面角度未达到给定阈值。
18.进一步的,只有在无使用者且与地面角度达到给定阈值这一种状态时,装置开始工作,其他三种状态装置均不工作。
19.进一步的,此时单片机控制双通电控阀门与微型吸气泵一端连接的通道打开,与微型充气泵一端连接的通道关闭,此时微型充气泵不工作,微型吸气泵开始工作,将内部的气体往外界排出,内部气体变少,气压变小,在压强的作用下伸缩杆开始收缩,直至伸缩杆收缩至最短,进入到圆台底座内,拐杖站立。
20.进一步的,在拐杖通过杠杆原理进行站立起来时,此时伸缩杆处于收缩状态,在这个时候重力传感器检测到拐杖与地面的角度已经大于设定的角度,达到站立状态且稳定,此时单片机控制双通电控阀门与微型吸气泵一端连接的通道关闭,与微型充气泵一端连接的通道打开,此时微型充气泵开始工作,微型吸气泵不工作,将外部的气体往拐杖内部吸入,内部气体变多,气压变大。
21.进一步的,在压强的作用下伸缩杆开始伸展,直至伸缩杆伸展至原长,气泵停止工作。
22.进一步的,单片机控制双通电控阀门底部的两个通道阀门同时关闭,此时外部气体无法进入拐杖内部,拐杖内部气体无法进入外界,整个拐杖站立工作完成。
23.进一步的,所述的圆台底座外侧为凹凸不平的防滑设计,确保拐杖在站立时不会打滑,圆台底座中间空隔处可全部容纳伸缩杆缩短后进入。
24.进一步的,伸缩杆由多节伸缩短杆连接组成,伸缩短杆从上至下每节短杆直径逐渐变大,结构无创新,采用市面常见的多节伸缩杆设计。
25.进一步的,红外触摸传感器、光照传感器、led照明灯、单片机构成该装置的照明系统,由光照传感器对外界照度进行检测,红外触摸传感器检测是否有人使用。
26.进一步的,当有人使用且外界照度小于设定的照度值时,单片机控制led照明灯点亮,当红外触摸传感器检测到无人使用或有人使用但外界照度大于设定的照度值时,单片机控制led照明灯熄灭。
27.进一步的,所述的控制开关为整个装置的控制开关,当控制开关关闭时,此时整个
装置处于断电状态,装置完全不工作,杆体取决于关闭时状态。
28.进一步的,当控制开关打开时,装置正常工作,使用者可自行选择打不打开控制开关,在不打开控制开关时,拐杖可与正常拐杖无区别。
29.进一步的,当使用者不使用拐杖时关闭控制开关(13),此时该拐杖不工作,不会造成错误判定,且避免不使用时造成电量浪费,延长单次充电使用时长。
30.进一步的,采用重力传感器对拐杖与地表的角度进行检测,控制泵体工作的角度阈值设置为50
°
;控制led照明灯的照度阈值为5lx,阈值可根据实际情况进行调整。
31.进一步的,所述的红外触摸传感器、光照传感器、单片机、微型充气泵、微型吸气泵、双通电控阀门、led照明灯、重力传感器均由蓄电池供电,蓄电池通过充电口对其充电。
32.进一步的,增设便携模式,在不使用时,可通过两个气泵收缩伸缩杆,使拐杖最短,方便携带。
33.一种伸缩式特殊人群出行辅助设备,其操作方法步骤如下:步骤一:由检测组件完成各种检测任务,即由红外触摸传感器和重力传感器检测使用者信息,进而当使用者使用拐杖或拐杖偏移角度小于50度时,拐杖内部的伸缩组件不工作;步骤二:当红外触摸传感器和重力传感器检测到拐杖离开人手且偏移角度大于50度时,将信息发送到单片机,单片机会结合重力传感器和红外触摸传感器的信息综合处理,获取拐杖倾倒信息,进而促使伸缩组件工作,当拐杖倾倒时,利用负压原理,通过微型充气泵、微型吸气泵、双通电控阀门的共同作用使伸缩杆在外界大气压作用下实现伸缩,伸缩至圆台底座内部,同理,当拐杖站立后,拐杖又逐渐恢复原长;步骤三:利用光照传感器对周围环境的灯光进行检测,当单片机收到来自光照传感器检测到的光照强度小于所设定打开led照明灯的阈值时,单片机控制led照明灯进行照明,反之,控制led照明灯关闭。
34.与现有技术相比,本发明具有以下优点:1、利用红外触摸传感器检测使用者信息,利用重力传感器检测拐杖与竖直方向之间的角度信息,可根据使用者情况进行调整,智能可控;2、通过利用物理重心原理和自动伸缩的设计进而实现拐杖的自动站立伸缩平衡,结构巧妙新颖;3、与利用不倒翁原理设置的自动站立拐杖相比,该方案设计的拐杖重量更轻,更便携;4、夜间时提供照明,方便使用者全时段出行;5、可增设便携模式,即在不使用时收缩伸缩杆,方便携带。
附图说明
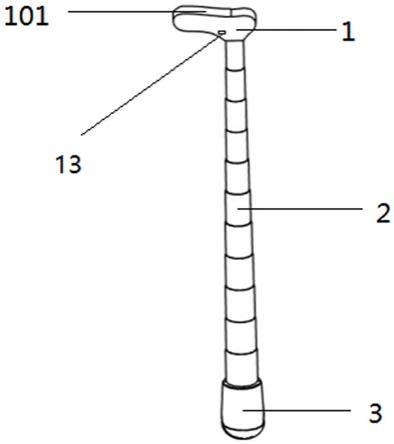
35.图1为本发明的整体结构设计图;图2为本发明的局部结构设计图;图3为本发明的信号处理逻辑图;图4为本发明的整体电路图;图中各标号为1-手柄、101-红外触摸传感器、2-伸缩杆、3-圆台底座、4-光照传感器、5-单片机、6-微型充气泵、7-微型吸气泵、8-双通电控阀门、9-led照明灯、10-蓄电池、11-重力传感器、12-充电口、13-控制开关。
具体实施方案
36.为使本发明的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本发明作进一步说明。应该理解,这些描述只是实例性的,而并非要限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
37.请参阅图1-3;本发明提供一种伸缩式特殊人群出行辅助设备,其目的在于通过对拐杖结构设计的改进,巧妙地综合运用了物理原理,通过微型吸气泵7及微型充气泵6的作用往拐杖内部吸气及排气,通过气压的作用增长及收缩伸缩杆,改变拐杖在倒地时形成的杠杆模型的力矩及力臂,在不增加拐杖重量的原则上使得拐杖在倒地时能自动站立,合理最优状态分配受力,使其能够保持稳定直立状态,省去了老人弯腰捡拐杖的麻烦,同时在满足基础功能的情况下增加了led照明灯9,满足老人夜间出行的需要,具有实际应用价值。
38.本发明采用的技术方案是:一种伸缩式特殊人群出行辅助设备,其特征在于:包括手柄1、伸缩杆2、圆台底座3、光照传感器4、单片机5、微型充气泵6、微型吸气泵7、双通电控阀门8、led照明灯9、蓄电池10、重力传感器11、充电口12、控制开关13,手柄1下端与伸缩杆2上顶部结构连接并固定,伸缩杆2底部与圆台底座3顶部结构连接并固定,控制开关13设置在手柄1侧面不影响握持的位置,光照传感器4和充电口12设置在圆台底座3外侧并固定,微型充气泵6、微型吸气泵7、双通电控阀门8固定在圆台底座3的承托台上,微型充气泵6、微型吸气泵7、双通电控阀门8呈直线布置,微型充气6泵、微型吸气泵7在两端,双通电控阀门8在正中,微型充气泵6与微型吸气泵7均有两个通道,一个和外界连接的通道一个和双通电控阀门8连接的通道,与外界连接的通道管道固定圆台底座3上,保留通道口,此通道设置有滤网,防止灰尘进入杆体内部,双通电控阀门8有三个通道,两个分别与微型充气泵6和微型吸气泵7连接,连接方式均为固定连接,相对不能运动,一个与拐杖内部连通,拐杖内部为中空结构,可实现内外气体吸进排出,单片机5、蓄电池10、重力传感器11固定在圆台底座3的底部平面上,位于微型充气泵6、微型吸气泵7、双通电控阀门8的下方,单片机5、蓄电池10、重力传感器11与微型充气泵6、微型吸气泵7、双通电控阀门8无接触,led照明灯9为弧形片状结构,沿圆台底座3外侧设置,沿圆台底座3外侧环绕一圈无缝接触并固定,光照传感器4、微型充气泵6、微型吸气泵7、双通电控阀门8、led照明灯9、重力传感器11均与单片机5有线连接并受其控制,拐杖倒地时,在以拐杖上圆台底座3与地面接触的支撑点为基点的力矩模型中,开始的时候支撑点左端,即靠近圆台底座3的底部平面端的质量大,但与圆台底座3与地面接触的支撑点的距离短,即力臂短,力矩模型中支撑点右端,即靠近手柄1的一端,这一端的质量小,但与圆台底座3与地面接触的支撑点的距离长,此时左端悬空,右端接触地面,力矩模型平衡,但在气泵的作用下,伸缩杆2从以圆台底座3与地面接触的支撑点的右端进入左端,进而左端质量增大而右端质量减小,同时由于伸缩杆2的收缩,左端的力臂不变,右端的力臂随着伸缩杆2的收缩逐步变短,在伸缩杆2收缩完成后,此时的力矩模型已经改变,与原模型相比,新模型左端的质量变大且力臂不变,右端的质量与力臂均变小,原有模型稳定被破坏,以圆台底座3与地面接触的支撑点为基点的杠杆模型中原平衡为右端大进而与地面接触,此时变为左边大进而与地面接触,而设置的圆台底座3为碗状,即侧面为弧形,此时左端下降右端上升,拐杖顺着圆台底座3侧面的弧形站立起来,而底部为平面结构,拐杖站立稳定。
39.进一步的,所述的圆台底座3内部固定微型充气泵6、微型吸气泵7和双通电控阀门8的承托台,该承托台位于拐杖倒地时手柄1与圆台底座3两个支撑点其中圆台底座3上支撑点的左边,也就是以该支撑点为中心,圆台底座3上底部平台的一端,其目的是为了增加在拐杖倒地时以拐杖上圆台底座3支撑点为基点形成的杠杆圆台底座3一端的质量,这样的话便于拐杖沿圆台底座3外侧弧形站立。
40.进一步的,双通电控阀门8三个通道中,顶部通道无控制开关,该通道一直处于打开状态,下部两端通道均有电控阀门进行控制,可开启及关闭,微型充气泵6及微型吸气泵7的两端均无控制阀门,通道一直处于打开状态,但由于微型充气泵6及微型吸气泵7均有与双通电控阀门8连接的通道,故微型充气泵6及微型吸气泵7通道是否打开的最终效果由双通电控阀门8决定。
41.进一步的,拐杖杆体密闭,在单片机5对微型充气泵6、微型吸气泵7、双通电控阀门8的控制下,实现气体吸进及排出。
42.进一步的,当伸缩杆2处于伸展状态时,内部空气多,当伸缩杆2处于收缩状态时,内部空气少。
43.进一步的,所述的手柄1顶部手握处外侧还设置有红外触摸传感器101,红外触摸传感器101与单片机5有线连接并受单片机5控制。
44.进一步的,由于工作时伸缩杆2会进行伸缩,故红外触摸传感器101和控制开关13与单片机5连接的线路长度大于伸缩杆2长度,保证在伸缩杆2处于完全伸展状态,即杆体最长时线路长度依然够用。
45.进一步的,红外触摸传感器101能对是否有人握有手把进行检测,当红外触摸传感器101检测到有热源触摸,则说明此时有人在使用拐杖。
46.进一步的,当有人使用拐杖时,这个信息会传递给单片机5,红外触摸传感器101与重力传感器11构成判断拐杖是否工作的检测端,单片机5进行控制的依据就是红外触摸传感器101与重力传感器11检测的数据,进而单片机5会根据这个信息以及角度信息对气泵进行控制。
47.进一步的,所述的红外触摸传感器101、重力传感器11、微型充气泵6、微型吸气泵7、双通电控阀门8、单片机5构成该装置的主体,即实现拐杖伸缩控制功能。
48.进一步的,当装置工作时,首先通过红外触摸传感器101检测使用者状态,即是否有使用者,重力传感器11检测拐杖与地面角度信息,共四种状态:无使用者且与地面角度达到给定阈值、无使用者且与地面角度未达到给定阈值、有使用者且与地面角度达到给定阈值、有使用者且与地面角度未达到给定阈值。
49.进一步的,只有在无使用者且与地面角度达到给定阈值这一种状态时,装置开始工作,其他三种状态装置均不工作。
50.进一步的,此时单片机5控制双通电控阀门8与微型吸气泵7一端连接的通道打开,与微型充气泵6一端连接的通道关闭,此时微型充气泵6不工作,微型吸气泵7开始工作,将内部的气体往外界排出,内部气体变少,气压变小,在压强的作用下伸缩杆2开始收缩,直至伸缩杆2收缩至最短,进入到圆台底座3内,拐杖站立。
51.进一步的,在拐杖通过杠杆原理进行站立起来时,此时伸缩杆2处于收缩状态,在这个时候重力传感器11检测到拐杖与地面的角度已经大于设定的角度,达到站立状态且稳
定,此时单片机5控制双通电控阀门8与微型吸气泵7一端连接的通道关闭,与微型充气泵6一端连接的通道打开,此时微型充气泵6开始工作,微型吸气泵7不工作,将外部的气体往拐杖内部吸入,内部气体变多,气压变大。
52.进一步的,在压强的作用下伸缩杆2开始伸展,直至伸缩杆2伸展至原长,气泵停止工作。
53.进一步的,单片机5控制双通电控阀门8底部的两个通道阀门同时关闭,此时外部气体无法进入拐杖内部,拐杖内部气体无法进入外界,整个拐杖站立工作完成。
54.进一步的,所述的圆台底座3外侧为凹凸不平的防滑设计,确保拐杖在站立时不会打滑,圆台底座3中间空隔处可全部容纳伸缩杆2缩短后进入。
55.进一步的,伸缩杆2由多节伸缩短杆连接组成,伸缩短杆从上至下每节短杆直径逐渐变大,结构无创新,采用市面常见的多节伸缩杆设计。
56.进一步的,红外触摸传感器101、光照传感器4、led照明灯9、单片机5构成该装置的照明系统,由光照传感器4对外界照度进行检测,红外触摸传感器101检测是否有人使用。
57.进一步的,当有人使用且外界照度小于设定的照度值时,单片机5控制led照明灯9点亮,当红外触摸传感器101检测到无人使用或有人使用但外界照度大于设定的照度值时,单片机5控制led照明灯9熄灭。
58.进一步的,所述的控制开关13为整个装置的控制开关,当控制开关13关闭时,此时整个装置处于断电状态,装置完全不工作,杆体取决于关闭时状态。
59.进一步的,当控制开关13打开时,装置正常工作,使用者可自行选择打不打开控制开关13,在不打开控制开关13时,拐杖可与正常拐杖无区别。
60.进一步的,当使用者不使用拐杖时关闭控制开关13,此时该拐杖不工作,不会造成错误判定,且避免不使用时造成电量浪费,延长单次充电使用时长。
61.进一步的,采用重力传感器11对拐杖与地表的角度进行检测,控制泵体工作的角度阈值设置为50
°
;控制led照明灯9的照度阈值为5lx,阈值可根据实际情况进行调整。
62.进一步的,所述的红外触摸传感器101、光照传感器4、单片机5、微型充气泵6、微型吸气泵7、双通电控阀门8、led照明灯9、重力传感器11均由蓄电池10供电,蓄电池10通过充电口12对其充电。
63.进一步的,增设便携模式,在不使用时,可通过两个气泵收缩伸缩杆2,使拐杖最短,方便携带。
64.请参阅图4:供电部分使用12v锂电池供电,通过电源转换模块,降压到3.3v给各个模块供电。电路左边第一列是单片机5最小系统电路,保证单片机5正常工作,包括mcu,复位电路,晶振电路。单片机5通过in1引脚双通电控阀门8out1的微型充气泵6,in2引脚控制out2的微型吸气泵7。重力传感器11与单片机5相连,通过spi通信读取拐杖的姿态信息。光照传感器4与单片机5相连,通过iic通信读取光照的信息。红外触摸传感器101与单片机5相连,通过引脚out判断是否有人在使用。led照明电路通过单片机5引脚led控制,通过三极管放大电路,让流过led的电流更大,led照明灯9亮度更强。
65.应当理解的是,本发明的上述具体实施方式仅仅用于示例性说明或解释本发明的原理,而不构成对本发明的限制。因此,在不偏离本发明的精神和范围的情况下所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。此外,本发明所附权利要求旨
在涵盖落入所附权利要求范围和边界、或者这种范围和边界的等同形式内的全部变化和修改例子。