1.本发明涉及一种自动化设备,特别是一种换模设备。
背景技术:
2.在制鞋的产业中,需要对打胶的鞋底和鞋帮进行加热或压合,其中对鞋的脚掌部分需要用专用的模具即鞋掌支撑件来支撑,撑件来支撑保证加热和压合能加工到位,保证产品质量,但是在制鞋的过程中,一个生产线会生产各种款式的鞋子,产线需要根据不同款式的鞋子来更换不同的鞋掌支撑件,目前均是通过人工将用过的鞋掌支撑件取下来,然后安装上待用的鞋掌支撑件。
3.但本技术发明人在实施本技术实施例的过程中,发现上述技术至少存在如下技术问题:
4.1.更换鞋掌支撑件需要用人工来操作,耽误时间,影响生产效率,也增加了人力成本。
5.2.不能实现自动化换模操作。
技术实现要素:
6.本发明提供一种换模设备,用于解决需要人工更换鞋掌支撑件,从而影响生产效率,增加人力成本和不能实现自动化操作的问题。
7.根据本发明的一个方面,提供了一种换模设备,用于更换鞋掌支撑件,换模设备包括换模机构和底座,换模机构设置在底座上,换模机构包括:
8.直线导轨,直线导轨与底座固定连接,直线导轨的长度方向与鞋掌支撑件的长度方向垂直;
9.气缸固定架,气缸固定架设置在直线导轨上且与直线导轨滑动连接,气缸固定架内设有移动板和至少一根导柱,导柱沿垂直方向设置,移动板在气缸固定架内可沿导柱上下移动;
10.第一换模气缸,第一换模气缸水平设置,第一换模气缸与直线导轨平行,第一换模气缸的缸体与底座固定连接,第一换模气缸的活塞杆与气缸固定架固定连接;
11.第二换模气缸,第二换模气缸沿垂直方向设置,第二换模气缸的缸体与气缸固定架或移动板其中之一固定连接,第二换模气缸的活塞杆与气缸固定架或移动板中的另一件固定连接;
12.第三换模气缸,第三换模气缸的缸体固设在移动板上;
13.夹持机构,夹持机构与第三换模气缸的活塞杆固定连接,夹持机构包括一双活塞杆气缸和两个夹持件,双活塞杆气缸两端的活塞杆分别固定连接一夹持件,两夹持件的相对方向分别设有定位部,定位部用于固定鞋掌支撑件。
14.进一步地,换模机构设有位置控制机构,位置控制机构用于控制气缸固定架在直线导轨上的位置。
15.进一步地,位置控制机构包括感应开关和三位五通电磁阀,感应开关设置在直线导轨下方;
16.其中,当感应开关感应到第一换模气缸的位置后,发送信号给中央处理器,中央处理器接到位置信号后通过三位五通电磁阀控制第一换模气缸停止。
17.进一步地,位置控制机构包括第一换模气缸为双行程气缸。
18.进一步地,换模机构还包括第一工作台,第一工作台用于放置待更换的鞋掌支撑件,第一工作台内设有预热零件,预热零件用于对备用的鞋掌支撑件进行预加热,第一工作台设置在直线导轨和第三工作台之间,第三工作台为鞋掌支撑件的固定位置。
19.进一步地,第一工作台上表面固定设置有第一定位柱,第一定位柱和鞋掌支撑件对应的定位孔相匹配。
20.进一步地,换模机构还包括第二工作台,第二工作台用于放置使用后的鞋掌支撑件,第二工作台设置在直线导轨和第三工作台之间,第三工作台为鞋掌支撑件的固定位置。
21.进一步地,第二工作台上表面固定设置有第二定位柱,第二定位柱和鞋掌支撑件对应的定位孔相匹配。
22.进一步地,定位部为平行设置的至少两个柱体,柱体与定位部垂直。
23.根据本发明的有益效果:
24.本发明通过三个换模气缸来控制方向,第一换模气缸控制了模具的左右移动方向,第二换模气缸控制了模具的上下移动方向,第三换模气缸控制了模具的前后移动方向,夹持机构在双活塞杆气缸的控制下对模具即鞋掌支撑件进行夹紧和松开,通过上述四个气缸的联动,实现了模具即鞋掌支撑件的取出、运输及放置的自动化过程,不需要人工来操作,节省了人力和时间,也提高了生产效率。
附图说明
25.构成本技术的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
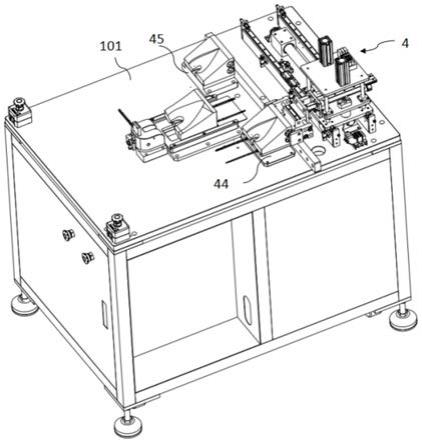
26.图1为本发明换模设备的立体结构示意图;
27.图2为本发明一具体实施例换模机构的立体结构示意图;
28.图3为本发明另一具体实施例换模机构的立体结构示意图;
29.图中:101-底座;111-鞋掌支撑件,4-换模机构;41-直线导轨;42-气缸固定架;421-导柱;422-移动板;431-第一换模气缸;432-第二换模气缸;433-第三换模气缸;434-双活塞杆气缸;44-第一工作台;45-第二工作台;46-第三工作台;47-感应开关;48-挡位器。
具体实施方式
30.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
31.需要指出的是,除非另有指明,本技术使用的所有技术和科学术语具有与本技术所属技术领域的普通技术人员通常理解的相同含义。
32.在本发明中,在未作相反说明的情况下,使用的方位词如“上、下、顶、底”通常是针对附图所示的方向而言的,或者是针对部件本身在竖直、垂直或重力方向上而言的;同样
地,为便于理解和描述,“内、外”是指相对于各部件本身的轮廓的内、外,但上述方位词并不用于限制本发明。
33.为了解决现有技术中需要人工更换鞋掌支撑件111,从而影响生产效率,增加人力成本和不能实现自动化操作的问题,本发明提供了一种换模设备,具体方案如下。
34.本发明所提及的换模设备是更换鞋掌支撑件111的设备,不是泛指所有的模具或夹具。
35.请参阅图1和图2所示,为本发明一种换模设备的一具体实施方式。
36.一种换模设备,用于更换鞋掌支撑件111,换模设备包括换模机构4和底座101,换模机构4设置在底座101上,换模机构4包括:
37.直线导轨41,直线导轨41水平设置且与底座101固定连接,直线导轨41的长度方向与鞋掌支撑件111的长度方向垂直;
38.气缸固定架42,气缸固定架42设置在直线导轨41上且与直线导轨41滑动连接,气缸固定架42内设有移动板422和至少一根导柱421,导柱421沿垂直方向设置,移动板422在气缸固定架42内可沿导柱421上下移动;
39.第一换模气缸431,第一换模气缸431水平设置且与直线导轨41平行,第一换模气缸431的缸体与底座101固定连接,第一换模气缸431的活塞杆与气缸固定架42固定连接;
40.第二换模气缸432,第二换模气缸432沿垂直方向设置,第二换模气缸432的缸体与气缸固定架42或移动板422其中之一固定连接,第二换模气缸432的活塞杆与气缸固定架42或移动板422中的另一件固定连接,优选第二换模气缸432为两个,设置在气缸固定架42的顶面上;
41.第三换模气缸433,第三换模气缸433的缸体固设在移动板422上;
42.夹持机构,夹持机构与第三换模气缸433的活塞杆固定连接,夹持机构包括一双活塞杆气缸434和两个夹持件,双活塞杆气缸434两端的活塞杆分别固定连接一夹持件,两夹持件的相对方向分别设有定位部,定位部用于固定鞋掌支撑件111。
43.本实施例通过三个换模气缸来控制方向,第一换模气缸431控制了模具的左右移动方向,第二换模气缸432控制了模具的上下移动方向,第三换模气缸433控制了模具的前后移动方向,夹持机构在双活塞杆气缸434的控制下对模具即鞋掌支撑件111进行夹紧和松开,通过上述四个气缸的联动,实现了模具即鞋掌支撑件111的自动更换,不需要人工来操作,节省了人力和时间,也提高了生产效率。
44.进一步的,换模机构4设有位置控制机构,位置控制机构用于控制气缸固定架42在直线导轨41上的位置。
45.优选的,位置控制机构包括感应开关47和三位五通电磁阀。
46.其中,当感应开关47感应到第一换模气缸的位置后,发送信号给中央处理器,中央处理器接到位置信号后通过三位五通电磁阀控制第一换模气缸停止,感应开关47可以是磁性开关、接近开关、限位开关或光电开关。
47.优选的,第一换模气缸431为双行程气缸。
48.通过位置控制机构,可以控制气缸固定架42在直线导轨41上的位置,当调整了鞋掌支撑件111在底座101上的位置,相应的调整位置控制机构,仍然能够实现对鞋掌支撑件111的自动更换。
49.进一步的,请参阅图3所示,换模机构4还包括第一工作台44,第一工作台44用于放置待更换的鞋掌支撑件111,第一工作台44内设有预热零件,预热零件用于对备用的鞋掌支撑件111进行预加热,第一工作台44设置在直线导轨41和鞋掌支撑件111第三工作台46之间,第三工作台46为鞋掌支撑件111的固定位置。
50.进一步的,第一工作台44上表面固定设置有第一定位柱,第一定位柱和鞋掌支撑件111对应的定位孔相匹配。
51.如果换模设备和铁板烧等需要加热的工艺配合时,如果直接将鞋掌支撑件111放到第三工作台46上,鞋掌支撑件111是冷的,需要等到鞋掌支撑件111在第三工作台46中加热到设定温度后才能继续生产,整个生产线会停止比较长一段时间,本实施例设置了第一工作台44,第一工作台44内设有预热零件,可以在更换鞋掌支撑件111之前先对待更换的鞋掌支撑件111进行预热,等预热后的鞋掌支撑件111被更换后,温度基本到达设定温度,生产线基本不需要等待就可以继续生产,即使预热后的鞋掌支撑件111的温度和设定温度稍有偏差,生产线也只需等待很短时间就可以了。
52.通过设置第一定位柱,第一定位柱和鞋掌支撑件111对应的定位孔相匹配,实现预热后的鞋掌支撑件111与第一工作台44的快速准确的定位。
53.进一步的,请参阅图3所示,换模机构4还包括第二工作台45,第二工作台45用于放置使用后的鞋掌支撑件111,第二工作台45设置在直线导轨41和鞋掌支撑件111的第三工作台46之间,第三工作台46为鞋掌支撑件111的固定位置。
54.进一步的,第二工作台45上表面固定设置有第二定位柱,第二定位柱和鞋掌支撑件111对应的定位孔相匹配。
55.当一款产品做完后,需要更换鞋掌支撑件111,换模机构4需要先将第三工作台46中的鞋掌支撑件111移走,才能更换其它种类的鞋掌支撑件111,设置第二工作台45可以方便换模机构4先就近存放换下的鞋掌支撑件111,待换模机构4更换完成第三工作台46上的鞋掌支撑件111更换工作后,生产线已经开始运转起来后,再来处理换下的鞋掌支撑件111,缩短了更换鞋掌支撑件111的时间,生产线等待的时间减少,工作效率得到了提高。
56.通过设置第二定位柱,第二定位柱和鞋掌支撑件111对应的定位孔相匹配,实现鞋掌支撑件111与第二工作台45的快速准确的定位。
57.感应开关47共三个,三个感应开关47分别和三位五通电磁阀及气缸配合来控制气缸固定架42在直线导轨41上的三个位置,第一个位置与第一工作台44相对应,第二个位置与第二工作台45相对应,第三个位置与第三工作台46相对应。
58.当感应开关47感应到气缸的位置后,发送信号给中央处理器,中央处理器接到位置信号后通过三位五通电磁阀控制气缸停止。
59.进一步的,定位部为平行设置的至少两个柱体,柱体与定位部垂直。
60.两夹持件上设置多个定位柱,鞋掌支撑件111上设置有相对应的定位孔,通过设置多个定位柱,在取放鞋掌支撑件111的过程中不会发生翻转,稳定性高。
61.通过上述设置第一工作台44和第二工作台45,和第三工作台46共同组成了一个工作台群,当我们需要更换需要预热的鞋掌支撑件111时,提前将备用的鞋掌支撑件111放入第一工作台44进行预加热,当需要更换时,换模机构4根据通过中央处理器的指令,将第三工作台46的鞋掌支撑件111取出,放到第二工作台45上,然后将预热过的鞋掌支撑件111放
入第三工作台46,实现了换模机构4自动更换鞋掌支撑件111的功能。
62.如果生产工艺中鞋掌支撑件111不需要加热,如打圆,拔钉等,可以将第一工作台44的加热功能关掉即可,第一工作台44变成了放置待更换鞋掌支撑件111的第二工作台。
63.直线导轨41的两端分别设有挡位器48,气缸固定架42碰到两端的挡位器48后停止运动,防止气缸固定架42从直线导轨41上脱落,对换模机构4起到保护作用。
64.显然,上述所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
65.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本技术的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、工作、器件、组件和/或它们的组合。
66.需要说明的是,本技术的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本技术的实施方式能够以除了在这里图示或描述的那些以外的顺序实施。
67.以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。