1.本发明涉及一种制鞋设备,特别是一种鞋底拔钉和换模一体设备。
背景技术:
2.在鞋子的制造过程中,将鞋中底放到鞋楦上时,需要先打鞋钉固定鞋中底的位置,在铁板烧后将鞋钉拔出,才能继续进行后续制作,在鞋子的制造过程中,当一款产品做完后需要更换鞋掌支撑件,只有更完成合适的鞋掌支撑件,才能继续进行后续的工作,目前的拔钉和换模都是人工进行,费时费力,效率低下,人力浪费严重,急需一个可以将拔钉和换模两个工艺结合起来的设备,同时实现自动拔钉和换模功能。
技术实现要素:
3.本发明提供一种鞋底拔钉和换模一体设备,用于解决人工换模和人工拔钉时间长,生产过程中的自动化程度低,工作效率低,浪费人力的问题。
4.根据本发明的一个方面,提供了一种鞋底拔钉和换模一体设备,设置在底座上,底座上设置有支撑架,其特征在于,鞋底拔钉和换模一体设备包括鞋楦定位机构、鞋楦支撑机构、拔钉机构和换模机构;
5.拔钉机构设置在底座内,拔钉机构至少有一组,每组拔钉机构包括气动平行开口钳和第一直线模组,气动平行开口钳包括一拔钉气缸和竖直安装在拔钉气缸上的拔钉钳,拔钉气缸用于控制拔钉钳的打开和合拢,拔钉钳与鞋钉在垂直方向的位置相对应,气动平行开口钳与第一直线模组的滑台固定连接,第一直线模组与底座固定连接,第一直线模组的滑台可沿竖直方向上下移动;
6.鞋楦定位机构包括定位板、定位气缸和鞋楦定位柱,定位气缸与支撑架固定连接,定位板的上端面与定位气缸的伸缩轴固定连接,定位板的下端面与鞋楦定位柱的第一端固定连接,鞋楦定位柱的第二端设有定位头,定位头的第二端与所述鞋楦定位柱的第二端通过销钉活动连接,定位头和鞋楦定位柱之间设有第一间隙,第一间隙用于定位头在鞋楦定位柱上晃动的活动间隙,定位头用于固定鞋楦;
7.鞋楦支撑机构包括鞋跟支撑件,鞋跟支撑件固设在底座上,鞋跟支撑件与鞋楦定位柱的位置相对应,鞋跟支撑件的上端面为平面,用于支撑鞋楦的后跟部分。
8.换模机构包括:
9.直线导轨,直线导轨与底座固定连接,直线导轨的长度方向与鞋掌支撑件的长度方向垂直;
10.气缸固定架,气缸固定架设置在直线导轨上且与直线导轨滑动连接,气缸固定架内设有移动板和至少一根导柱,导柱沿垂直方向设置,移动板在气缸固定架内可沿导柱上下移动;
11.第一换模气缸,第一换模气缸水平设置,第一换模气缸与直线导轨平行,第一换模气缸的缸体与底座固定连接,第一换模气缸的活塞杆与气缸固定架固定连接;
12.第二换模气缸,第二换模气缸沿垂直方向设置,第二换模气缸的缸体与气缸固定架或移动板其中之一固定连接,第二换模气缸的活塞杆与气缸固定架或移动板中的另一件固定连接;
13.第三换模气缸,第三换模气缸的缸体固设在移动板上;
14.夹持机构,夹持机构与第三换模气缸的活塞杆固定连接,夹持机构包括一双活塞杆气缸和两个夹持件,双活塞杆气缸两端的活塞杆分别固定连接一夹持件,两夹持件的相对方向分别设有定位部,定位部用于固定鞋掌支撑件。
15.进一步的,换模机构设有位置控制机构,位置控制机构用于控制气缸固定架在直线导轨上的位置,位置控制机构包括感应开关和三位五通电磁阀,感应开关设置在直线导轨下方;
16.其中,当感应开关感应到第一换模气缸的位置后,发送信号给中央处理器,中央处理器接到位置信号后通过三位五通电磁阀控制第一换模气缸停止。
17.进一步的,换模机构还包括第一工作台和第二工作台,第一工作台用于放置待更换的鞋掌支撑件,第一工作台内设有预热零件,预热零件用于对备用的鞋掌支撑件进行预加热,第二工作台用于放置使用后的鞋掌支撑件,第一工作台和第二工作台设置在直线导轨和第三工作台之间,第三工作台为所述鞋掌支撑件的固定位置。
18.进一步的,拔钉机构为一组,拔钉机构还包括第二直线模组和第三直线模组,第二直线模组的滑台与第一直线模组固定连接,第二直线模组的滑台可沿水平方向左右移动,第二直线模组的第一端与第三直线模组的滑台固定连接,第二直线模组的第二端与底座滑动连接,第三直线模组的滑台和第二直线模组的第二端可沿水平方向前后移动,第三直线模组与底座固定连接;
19.其中,气动平行开口钳、第一直线模组、第二直线模组和第三直线模组的运动是根据中央处理器发出的指令信息进行。
20.进一步的,中央控制器发出的指令信息为鞋钉的位置信息,鞋钉的位置信息是中央处理器在打钉的过程中收集的鞋钉的位置信息。
21.进一步的,鞋底拔钉机构还包括一金属物体探测定位器,中央控制器发出的指令信息为金属物体探测定位器探测的鞋钉位置信息。
22.进一步的,鞋跟支撑件上设有限位块,限位块部分高出鞋跟支撑件,限位块可以在鞋跟支撑件内滑动,当鞋楦定位柱与鞋跟支撑件压合时,限位块被压入鞋跟支撑件内。
23.进一步的,鞋楦支撑机构还包括鞋掌支撑件,鞋掌支撑件固设在底座上,鞋掌支撑件上端面设有凹槽,凹槽用于容纳并支撑鞋楦的脚掌部分。
24.进一步的,鞋楦支撑机构还包括调整气缸,调整气缸的缸体与鞋掌支撑件或鞋跟支撑件的其中之一件固定连接,调整气缸的活塞杆与鞋掌支撑件或鞋跟支撑件中的另一件固定连接,调整气缸用于调整鞋掌支撑件与鞋跟支撑件之间的距离。
25.进一步的,鞋楦定位机构还包括鞋楦压紧柱和马达调整机构,马达调整机构包括调整马达和升降组件,调整马达固定在升降组件上,升降组件与定位板的下端面固定连接,升降组件包括涡轮和丝杆,丝杆与鞋楦压紧柱的第一端固定连接;
26.其中,调整马达通过涡轮带动丝杆上下运动。
27.本发明的有益效果:
28.在本发明中,一台设备上同时设置了拔钉机构和换模机构,鞋底拔钉和换模一体设备具有对鞋底拔钉和自动换模的双重功能,拔钉机构和换模机构可以共用一个底座,换模机构设置在底座的上面,拔钉机构设置在同一底座的下面,节省了一个工位的空间,拔钉机构和换模机构协调工作,当一款产品做完后需要更换鞋掌支撑件,拔钉机构停止工作,换模机构马上更换鞋掌支撑件,然后拔钉机构继续开始工作,拔钉机构和换模机构的协调动作可以根据中央处理器的指令有序的完成,鞋底拔钉和换模一体设备避免人工换模和人工拔钉时间长,提高了生产过程中的自动化程度,提高了工作效率,也节省了人力。
附图说明
29.构成本技术的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
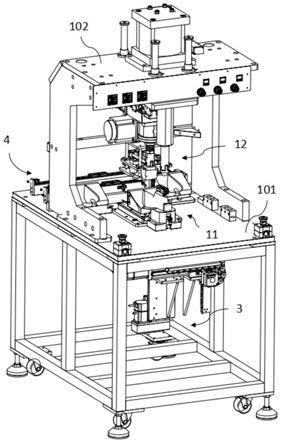
30.图1为本发明一具体实施方式鞋底拔钉和换模一体设备的立体结构示意图;
31.图2为本发明另一具体实施方式的拔钉机构立体结构示意图;
32.图3为本发明一具体实施方式的气动平行开口钳立体结构示意图;
33.图4为本发明一具体实施方式的鞋楦定位机构立体结构示意图一;
34.图5为本发明一具体实施方式的鞋楦定位机构立体结构示意图二;
35.图6为本发明一具体实施方式的定位头主视图;
36.图7为本发明一具体实施方式的鞋楦支撑机构立体结构示意图;
37.图8为本发明一具体实施方式的鞋掌支撑件立体结构示意图;
38.图9为本发明一具体实施例换模机构的立体结构示意图;
39.图10为本发明另一具体实施例换模机构的立体结构示意图;
40.图中:101-底座;102-支撑架;11-鞋楦支撑机构;110-鞋跟支撑件;1101-限位块;111-鞋掌支撑件;1110-凹槽;1111-基准线;12-鞋楦定位机构;120-定位气缸;121-定位板;122-鞋楦定位柱;1220-定位头;1221-第一间隙;1222-定位销;123-鞋楦压紧柱;1230-压紧头;1231-第二间隙;124-调整马达;3-拔钉机构;30-气动平行开口钳;301-拔钉钳;302-拔钉气缸;303-u型开口;31-第一直线模组;32-第二直线模组;33-第三直线模组;4-换模机构;41-直线导轨;42-气缸固定架;421-导柱;422-移动板;431-第一换模气缸;432-第二换模气缸;433-第三换模气缸;434-双活塞杆气缸;44-第一工作台;45-第二工作台;46-第三工作台;47-感应开关;48-挡位器。
具体实施方式
41.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
42.需要指出的是,除非另有指明,本技术使用的所有技术和科学术语具有与本技术所属技术领域的普通技术人员通常理解的相同含义。
43.在本发明中,在未作相反说明的情况下,使用的方位词如“上、下、顶、底”通常是针对附图所示的方向而言的,或者是针对部件本身在竖直、垂直或重力方向上而言的;同样地,为便于理解和描述,“内、外”是指相对于各部件本身的轮廓的内、外,但上述方位词并不用于限制本发明。
44.本发明所提及的换模设备是更换鞋掌支撑件111的设备,不是泛指所有的模具或夹具。
45.请参阅图1,为本发明一种鞋底拔钉和换模一体设备的一具体实施方式,设置在底座101上,底座101上设置有支撑架102,鞋底拔钉和换模一体设备包括鞋楦定位机构12、鞋楦支撑机构11、拔钉机构3和换模机构4。
46.请参阅图2和图3所示,拔钉机构3设置在底座内,拔钉机构3至少有一组,每组拔钉机构3包括气动平行开口钳30和第一直线模组31,气动平行开口钳30包括一拔钉气缸302和竖直安装的拔钉钳301,拔钉气缸302的上端有一u型开口303,拔钉钳301的两个活动手柄安装在u型开口303内,拔钉气缸302控制两个活动手柄在u型开口303内活动,以此来控制拔钉钳301的打开和合拢,拔钉钳301与鞋钉在垂直方向的位置相对应,气动平行开口钳30与第一直线模组31的滑台固定连接,第一直线模组31与底座固定连接,第一直线模组31的滑台可沿竖直方向上下移动。
47.第一直线模组31可以是同步带型直线模组或滚珠丝杆直线模组。
48.请参阅图4和图5所示,鞋楦定位机构12包括定位板121、定位气缸120和鞋楦定位柱122,定位气缸120与支撑架102固定连接,定位板121的上端面与定位气缸120的伸缩轴固定连接,定位板121的下端面与鞋楦定位柱122的第一端固定连接,鞋楦定位柱122的第二端用于固定鞋楦。
49.鞋楦支撑机构11包括鞋跟支撑件110,鞋跟支撑件110固设在底座101上,鞋跟支撑件110与鞋楦定位柱122的位置相对应,鞋跟支撑件110的上端面为平面,用于支撑鞋楦的后跟部分。
50.请参阅图9和图10所示,鞋跟打圆和换模一体设备还包括换模机构4,换模机构4设置在底座101上,换模机构4包括:
51.直线导轨41,直线导轨41水平设置且与底座101固定连接,直线导轨41的长度方向与鞋掌支撑件111的长度方向垂直;
52.气缸固定架42,气缸固定架42设置在直线导轨41上且与直线导轨41滑动连接,气缸固定架42内设有移动板422和至少一根导柱421,导柱421沿垂直方向设置,移动板422在气缸固定架42内可沿导柱421上下移动;
53.第一换模气缸431,第一换模气缸431水平设置且与直线导轨41平行,第一换模气缸431的缸体与底座101固定连接,第一换模气缸431的活塞杆与气缸固定架42固定连接;
54.第二换模气缸432,第二换模气缸432沿垂直方向设置,第二换模气缸432的缸体与气缸固定架42或移动板422其中之一固定连接,第二换模气缸432的活塞杆与气缸固定架42或移动板422中的另一件固定连接,优选第二换模气缸432为两个,设置在气缸固定架42的顶面上;
55.第三换模气缸433,第三换模气缸433的缸体固设在移动板422上;
56.夹持机构,夹持机构与第三换模气缸433的活塞杆固定连接,夹持机构包括一双活塞杆气缸434和两个夹持件,双活塞杆气缸434两端的活塞杆分别固定连接一夹持件,两夹持件的相对方向分别设有定位部,定位部用于固定鞋掌支撑件111。
57.在本发明中,通过鞋楦定位机构和鞋楦支撑机构将鞋楦固定起来,拔钉机构3在第一直线模组31的驱动下向上运动到鞋钉的位置,拔钉气缸302驱动拔钉钳301打开,然后在
第一直线模组31和拔钉气缸302的共同作用下,拔钉钳301合拢,夹住鞋钉,第一直线模组31向下运动,同时带动拔钉钳301拔出鞋钉。在本发明中通过第一直线模组31和拔钉气缸302的共同作用,实现了自动拔钉的功能,可以在每个钉的垂直下方设置一套拔钉机构3,就可以避免鞋钉被漏拔的问题,同时由于自动拔钉效率高,也缩短了鞋子制作的整个周期。
58.换模机构4通过三个换模气缸来控制方向,第一换模气缸431控制了模具的左右移动方向,第二换模气缸432控制了模具的上下移动方向,第三换模气缸433控制了模具的前后移动方向,夹持机构在双活塞杆气缸434的控制下对模具即鞋掌支撑件111进行夹紧和松开,通过上述四个气缸的联动,实现了模具即鞋掌支撑件111的自动更换,不需要人工来操作,节省了人力和时间,也提高了生产效率。
59.在本发明中,一台设备上同时设置了拔钉机构3和换模机构4,鞋底拔钉和换模一体设备具有对鞋底拔钉和自动换模的双重功能,拔钉机构3和换模机构4可以共用一个底座101,换模机构4设置在底座101的上面,拔钉机构3设置在同一底座101的下面,节省了一个工位的空间,拔钉机构3和换模机构4协调工作,当一款产品做完后需要更换鞋掌支撑件111,拔钉机构3停止工作,换模机构4马上更换鞋掌支撑件111,然后拔钉机构3继续开始工作,拔钉机构3和换模机构4的协调动作可以根据中央处理器的指令有序的完成,鞋底拔钉和换模一体设备避免人工换模和人工拔钉时间长,提高了生产过程中的自动化程度,提高了工作效率,也节省了人力。
60.进一步的,请参阅图2所示,拔钉机构3只有一组,拔钉机构3还包括第二直线模组32和第三直线模组33,第二直线模组32的滑台与第一直线模组31固定连接,第二直线模组32的滑台可沿水平方向左右移动,第二直线模组32的第一端与第三直线模组33的滑台固定连接,第二直线模组32的第二端与底座滑动连接,第三直线模组33的滑台和第二直线模组32的第二端可沿水平方向前后移动,第三直线模组33与底座固定连接;
61.其中,气动平行开口钳30、第一直线模组31、第二直线模组32和第三直线模组33的运动是根据中央处理器发出的指令信息进行。
62.第二直线模组32和第三直线模组33可以是同步带型直线模组或滚珠丝杆直线模组。
63.通过三个直线模组,即第一直线模组31、第二直线模组32和第三直线模组33的共同作用,实现拔钉钳301三维空间的运动,第一直线模组31控制拔钉钳301的上下运动,第二直线模组32控制拔钉钳301的左右运动,第三直线模组33控制拔钉钳301的前后运动,通过三个直线模组协同动作,可以根据中央处理器发出的指令信息调整拔钉钳301的位置,进行拔钉动作,本实施例只需要一组拔钉机构3即可实现对多个鞋钉的拔取,鞋钉的位置也不需要固定,也可以简化了打钉步骤中对鞋钉位置的严格要求。
64.进一步的,中央控制器发出的指令信息为鞋钉的位置信息,鞋钉的位置信息是中央处理器在打钉的过程中收集的鞋钉的位置信息。
65.在打钉的过程中,中央处理器可以接收打钉的位置信息并保存起来,当拔钉的时候,中央处理器根据鞋钉的位置信息对三个直线模组和拔钉气缸302发出指令,控制三个直线模组和拔钉气缸302的运动,实现拔钉,利用打钉的位置信息,可以避免寻找鞋钉的位置,并且信息准确,设备的工作量也变小。
66.进一步的,鞋底拔钉机构3还包括一金属物体探测定位器,中央控制器发出的指令
信息为金属物体探测定位器探测的鞋钉位置信息。
67.当鞋底拔钉和换模一体设备单独使用的时候,可以在鞋底拔钉机构3内安装一个金属物体探测定位器,用于对鞋底上的鞋钉的探测,并将探测的位置信息发给中央控制器,中央控制器根据探测的位置信息对三个直线模组和拔钉气缸302发出指令,控制三个直线模组和拔钉气缸302的运动,实现拔钉。
68.进一步的,鞋底拔钉机构3内设置一鞋钉收集盒,用于收集拔下的鞋钉,设置鞋钉收集盒后可以将拔下的鞋钉统一存放,然后统一处理。
69.进一步的,鞋楦定位柱122的第二端设有定位头1220,定位头1220的第二端与鞋楦定位柱122配合,定位头1220第二端上设有凸块,鞋楦定位柱122的第二端设有与定位头1220凸块形状相对应的槽,定位头1220上的凸块和鞋楦定位柱122的槽通过销钉固定。
70.优选的,请参阅图6所示,定位头1220的第一端设有定位销1222,定位销1222和鞋楦的定位孔相匹配,定位销1222的前端为圆台状,方便定位销1222与定位孔配合时找正方向。
71.优选的,定位头1220和鞋楦定位柱122之间有第一间隙1221,定位头1220可以在槽控制的范围内做一定幅度的晃动,方便定位销1222与定位孔配合时的进一步找正方向。
72.进一步的,请参阅图7所示,鞋跟支撑件110上设有限位块1101,限位块1101用于对鞋根在鞋楦长度方向限位,由于鞋楦上装有初步粘和的鞋中底和鞋帮,鞋楦放在鞋跟支撑件110上端面的平面上后,鞋楦的后跟靠在限位块1101上,实现了鞋楦再长度方向的限位。
73.限位块1101至少部分高出鞋跟支撑件110上端面的平面,限位块1101可以在鞋跟支撑件110内滑动,在限位块1101和鞋跟支撑件110之间设有弹性件,优选弹簧,当鞋掌支撑件111和鞋楦定位柱122在打开状态时,限位块1101在弹簧力的推动下至少部分高出鞋掌支撑件111,当鞋楦定位柱122在定位气缸120的带动下向下运动时,鞋楦定位柱122将限位块1101压入鞋跟支撑件110内,当鞋中底和鞋帮加热压合完成后,鞋楦定位柱122抬起,限位块1101在弹簧力的推动下再次高出鞋掌支撑件111,为下次定位做准备。
74.进一步的,请参阅图7所示,鞋楦支撑机构11还包括鞋掌支撑件111,鞋掌支撑件111固设在底座101上,鞋掌支撑件111上端面设有凹槽1110,凹槽1110用于容纳并支撑鞋楦的脚掌部分。
75.鞋掌支撑件111不仅对鞋楦有支撑作用,鞋掌支撑件111上端面的凹槽1110对鞋楦也有固定作用,在打圆的过程中,阻止鞋楦发生转动,防止打圆不彻底,影响鞋子质量。
76.进一步的,请参阅图8所示,鞋掌支撑件111上端面的凹槽1110内设有基准线1111,基准线1111用作放置鞋楦的对齐基准,基准线1111为鞋楦边缘的对齐线,当鞋楦沿着对齐线放置后,保证了鞋楦在宽度方向的位置。
77.进一步的,基准线1111有两条,一条用于左脚鞋楦的对齐基准,另一条用于右脚鞋楦的对齐基准,采用左右两条基准线1111,同一个鞋掌支撑件111既可以用作右脚鞋楦支撑,也可以用作左脚鞋楦支撑,减少了鞋掌支撑件111的数量,节省了成本,也省去了更换鞋掌支撑件111的时间,提高了工作效率。
78.采用了限位块1101对鞋楦长度方向进行大致的位置限定,通过基准线1111对鞋楦宽度方向进行大致的位置限定,基本保障了鞋楦的大致位置,然后经过定位销1222和定位头1220的自动找正,实现对鞋楦的准确定位。
79.进一步的,鞋楦支撑机构11还包括调整气缸,调整气缸的缸体与鞋掌支撑件111或鞋跟支撑件110的其中之一件固定连接,调整气缸的活塞杆与鞋掌支撑件111或鞋跟支撑件110中的另一件固定连接,调整气缸用于调整鞋掌支撑件111与鞋跟支撑件110之间的距离。
80.通过调整气缸来调整鞋掌支撑件111与鞋跟支撑件110之间的距离,可以适应不同号码的鞋子,当需要做小号码的鞋子时,将鞋掌支撑件111与鞋跟支撑件110之间的距离调小,当需要做大号码的鞋子时,将鞋掌支撑件111与鞋跟支撑件110之间的距离调大即可,实现了在同一套鞋掌支撑件111与鞋跟支撑件110上做各种尺码的鞋子。
81.进一步的,请参阅图4~5所示,鞋楦定位机构12还包括鞋楦压紧柱123和马达调整机构,马达调整机构包括调整马达124和升降组件,调整马达124固定在升降组件上,升降组件与定位板121的下端面固定连接,升降组件包括涡轮和丝杆,丝杆与鞋楦压紧柱123的第一端固定连接,调整马达124通过涡轮带动丝杆上下运动。
82.当然马达调整机构也可以是调整马达124和曲轴,曲轴将调整马达124轴的圆周运动转化为直线运动,这些都是现有技术,在此不多赘述。
83.通过马达调整机构124可以调整鞋楦压紧柱123对鞋楦的压力。
84.进一步的,鞋楦压紧柱123的第二端设有压紧头1230,压紧头1230的第一端用于压紧鞋楦或鞋帮,压紧头1230的第二端与鞋楦压紧柱123的第二端配合,压紧头1230上设有凸块,鞋楦压紧柱123的第二端设有与压紧头1230凸块形状相对应的槽,压紧头1230上的凸块和鞋楦压紧柱123的槽通过销钉固定,压紧头1230和鞋楦压紧柱123之间设有第二间隙1231,压紧头1230可以在槽控制的范围内做小幅度晃动,可以加大压紧头1230的压紧范围,即使鞋楦放的位置有偏差,也可以实现很好的压紧。
85.优选的,压紧头1230的第一端至少由柔性材料制成,对鞋楦或鞋帮起到保护作用。
86.进一步的,压紧头1230的第二端上的凸块也可以被一个圆柱体替代,圆柱体至少部分伸入鞋楦压紧柱123的第二端内并可以在鞋楦压紧柱123内滑动,压紧头1230和鞋楦压紧柱123之间设置弹性件,优选弹簧,当鞋楦压紧柱123和鞋掌支撑件111压合后,弹簧会对鞋楦的上的压力提供一定的缓冲,避免鞋楦压紧柱123压力过大损坏鞋楦和鞋帮。
87.进一步的,鞋楦定位机构12还包括为一压力传感器,压力传感器固设在鞋楦压紧柱123的第二端或压紧头1230的第一端,用于探测鞋楦压紧柱123对鞋楦的压力的大小。
88.当压力高于设定的压力阈值,中央处理器接受到压力传感器的高压信号后,马达调整机构124减小鞋楦压紧柱123对鞋楦的压力,当压力低于设定的压力阈值,中央处理器接受到压力传感器的低压信号后,马达调整机构124增大鞋楦压紧柱123对鞋楦的压力。
89.进一步的,鞋楦压紧柱123的第二端外表面设有柔性材料,柔性材料可以对鞋楦和鞋帮起到保护作用。
90.进一步的,换模机构4设有位置控制机构,位置控制机构用于控制气缸固定架42在直线导轨41上的位置。
91.优选的,位置控制机构包括感应开关47和三位五通电磁阀;
92.其中,当感应开关47感应到气缸的位置后,发送信号给中央处理器,中央处理器接到位置信号后通过三位五通电磁阀控制气缸停止,感应开关47可以是磁性开关、接近开关、限位开关或光电开关。
93.优选的,第一换模气缸431为双行程气缸或无杆气缸。
94.通过位置控制机构,可以控制气缸固定架42在直线导轨41上的位置,当调整了鞋掌支撑件111在底座101上的位置后,相应的调整位置控制机构,仍然能够实现对鞋掌支撑件111的自动更换。
95.进一步的,请参阅图10所示,换模机构4还包括第一工作台44,第一工作台44用于放置待更换的鞋掌支撑件111,第一工作台44内设有预热零件,预热零件用于对备用的鞋掌支撑件111进行预加热,第一工作台44设置在直线导轨41和鞋掌支撑件111第三工作台46之间,第三工作台46为鞋掌支撑件111的固定位置。
96.进一步的,第一工作台44上表面固定设置有第一定位柱,第一定位柱和鞋掌支撑件111对应的定位孔相匹配。
97.换模设备和铁板烧工艺配合使用,如果直接将鞋掌支撑件111放到第三工作台46上,鞋掌支撑件111是冷的,需要等到鞋掌支撑件111在第三工作台46中加热到设定温度后才能继续生产,整个生产线会停止比较长一段时间,本实施例设置了第一工作台44,第一工作台44内设有预热零件,可以在更换鞋掌支撑件111之前先对待更换的鞋掌支撑件111进行预热,等预热后的鞋掌支撑件111被更换后,温度基本到达设定温度,生产线基本不需要等待就可以继续生产,即使预热后的鞋掌支撑件111的温度和设定温度稍有偏差,生产线也只需等待很短时间就可以了。
98.通过设置第一定位柱,第一定位柱和鞋掌支撑件111对应的定位孔相匹配,实现预热后的鞋掌支撑件111与第一工作台44的快速准确的定位。
99.进一步的,请参阅图10所示,换模机构4还包括第二工作台45,第二工作台45用于放置使用后的鞋掌支撑件111,第二工作台45设置在直线导轨41和鞋掌支撑件111的第三工作台46之间,第三工作台46为鞋掌支撑件111的固定位置。
100.进一步的,第二工作台45上表面固定设置有第二定位柱,第二定位柱和鞋掌支撑件111对应的定位孔相匹配。
101.当一款产品做完后,需要更换鞋掌支撑件111,换模机构4需要先将第三工作台46中的鞋掌支撑件111移走,才能更换其它种类的鞋掌支撑件111,设置第二工作台45可以方便换模机构4先就近存放换下的鞋掌支撑件111,待换模机构4更换完成第三工作台46上的鞋掌支撑件111更换工作后,生产线已经开始运转起来后,再来处理换下的鞋掌支撑件111,缩短了更换鞋掌支撑件111的时间,生产线等待的时间减少,工作效率得到了提高。
102.通过设置第二定位柱,第二定位柱和鞋掌支撑件111对应的定位孔相匹配,实现鞋掌支撑件111与第二工作台45的快速准确的定位。
103.感应开关47共三个,三个感应开关47分别和三位五通电磁阀及气缸配合来控制气缸固定架42在直线导轨41上的三个位置,第一个位置与第一工作台44相对应,第二个位置与第二工作台45相对应,第三个位置与第三工作台46相对应。
104.当感应开关47感应到第一换模气缸431的位置后,发送信号给中央处理器,中央处理器接到位置信号后通过三位五通电磁阀控制第一换模气缸431停止。
105.进一步的,定位部为平行设置的至少两个柱体,柱体与定位部垂直。
106.两夹持件上设置多个定位柱,鞋掌支撑件111上设置有相对应的定位孔,通过设置多个定位柱,在取放鞋掌支撑件111的过程中不会发生翻转,稳定性高。
107.通过上述设置第一工作台44和第二工作台45,和第三工作台46共同组成了一个工
作台群,当我们需要更换需要预热的鞋掌支撑件111时,提前将备用的鞋掌支撑件111放入第一工作台44进行预加热,当需要更换时,换模机构4根据通过中央处理器的指令,将第三工作台46的鞋掌支撑件111取出,放到第二工作台45上,然后将预热过的鞋掌支撑件111放入第三工作台46,实现了换模机构4自动更换鞋掌支撑件111的功能。
108.如果生产工艺中鞋掌支撑件111不需要加热,如打圆,拔钉等,可以将第一工作台44的加热功能关掉即可,第一工作台44变成了放置待更换鞋掌支撑件111的第二工作台。
109.直线导轨41的两端分别设有挡位器48,气缸固定架42碰到两端的挡位器48后停止运动,防止气缸固定架42从直线导轨41上脱落,对换模机构4起到保护作用。
110.显然,上述所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
111.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本技术的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、工作、器件、组件和/或它们的组合。
112.需要说明的是,本技术的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本技术的实施方式能够以除了在这里图示或描述的那些以外的顺序实施。
113.以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。