1.本实用新型涉及钢琴辅助学习技术领域,特别是涉及一种用于钢琴教学的基础指法辅助训练机器人。
背景技术:
2.对于钢琴初学者来说,传统钢琴教师授课,学生上课方式分为两种;大课形式(一对多),也可以小课形式(一对一);其中无论是大课形式还是小课形式要达到最终教学目的,都需要教师和学生付出大量的时间、大量的精力去吸收知识、练习演奏才能达到一定的教学效果,同时一门技艺的学习是需要很多的课时量才能起到培养效果的。这也就意味着学生会花费大量的金钱去达到培育效果,一般家庭对于这种技艺培育会结合家庭经济条件而去选择是否学习。
3.人工教弹钢琴“手把手”教学法(基础指法训练),优点是效果好,灵活性高,对于钢琴学习中出现的问题可以实现快速解决。缺点是费用高昂,受时间影响因素大,传统一对一教学教师、上课时间经常不固定,其中表现在:学生要熟悉老师的教学风格、老师教学容易情绪化。教师和学生的上课时间需要提前安排、调整。部分地区教学师资力量不平衡,有天赋有兴趣的孩子没有老师教学、甚至经济方面不允许学习等因素。
4.基于此,市面出现多种钢琴训练软件以及钢琴训练装置,以替代人工教学。如中国专利cn211878796 u研发了一款钢琴智能辅助学习装置,其用led灯来引导钢琴学习者弹奏钢琴并且还能检测反馈弹奏信息;智能钢琴,最典型的是the one智能钢琴也是跟灯教学,要求人自主视觉反应快,才能弹好一首曲子,这样太注重于看琴键,会分散学习者的注意力,学习效果差,学生学习效率低,不能实现弹奏手感(手的运动,形成肌肉记忆)、音符听觉(形成听觉记忆)、音符视觉(形成视觉记忆)三者相结合的基础指法训练,这种学习方法存在一定的弊端,与传统的钢琴教学方式相比会弱化学生对于乐谱等乐理常识的理解,只能适用于兴趣教学而不适用于职业型教学,它不能模仿“人工手把手指法教学”。
技术实现要素:
5.本实用新型主要目的在于提供一种用于钢琴教学的基础指法辅助训练机器人,以解决上述问题。
6.为达上述目的,本实用新型提供一种用于钢琴教学的基础指法辅助训练机器人,包括固定架,所述固定架上设置有直线滑台模组;所述直线滑台模组上设置有机械手模组;所述机械手模组包括手臂支架;所述手臂支架上固定连接有伸缩模块支架;所述伸缩模块支架下方设置有五个伸缩模块;每个伸缩模块的输出端均设置有手指橡胶环;所述伸缩模块支架上方设置有用于控制伸缩模块动作的控制模块;还包括总控制器,所述总控制器分别与控制模块、直线滑台模组电连接。
7.进一步的,所述直线滑台模组设置有两个,呈对称设置;每个直线滑台模组上均设置有一个机械手模组;两个机械手模组分别与人的左右手相适配。
8.进一步的,所述直线滑台模组采用同步带式或滚珠螺杆式。
9.进一步的,所述直线滑台模组包括滑台座、滑台、同步带和伺服电机;所述伺服电机与滑台座一端侧面固定连接;所述伺服电机的电机轴伸入滑台座内部,并设置有第一同步轮;所述滑台座另一端内部转动设置有第二同步轮;所述同步带与第一同步轮和第二同步轮相适配;所述同步带与滑台固定连接;所述滑台座外部两侧均设置有柱形轨道;所述滑台底部两侧均转动设置有至少两个滚轮;所述滚轮与所述柱形轨道相适配。
10.进一步的,所述手臂支架底部与滑台顶部固定连接。
11.进一步的,所述手臂支架内侧固定设置有皮套支撑架,所述皮套支撑架两端均固定设置有用于固定手臂的皮套。
12.进一步的,所述伸缩模块输出端设置有吊环;所述手指橡胶环侧壁上设置有吊耳,所述吊耳穿射于吊环的孔内。
13.进一步的,所述伸缩模块采用气缸、电缸、液压缸中的一种。
14.进一步的,所述伸缩模块支架上设置有多个长圆孔,用于调节伸缩模块的位置。
15.本实用新型不需要改造传统钢琴的结构,安装在传统钢琴上即可使用,对钢琴学习者进行指法训练而言,实现弹奏手感(手的运动,形成肌肉记忆)、音符听觉(形成听觉记忆)、音符视觉(形成视觉记忆)三者相结合的基础指法训练系统,学习效果更好,是真正的“手把手”教学。极大地增加钢琴教学资源。本实用新型备结构简单、使用方便,经济实惠且可以使用多年,能很好的辅助钢琴的指法弹奏,非常适合初学者自学和钢琴爱好者练习与回顾。
附图说明
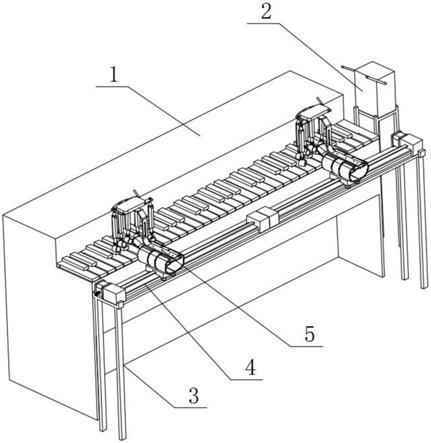
16.图1为本实用新型一种用于钢琴教学的基础指法辅助训练机器人应用场景示意图。
17.图2为本实用新型一种用于钢琴教学的基础指法辅助训练机器人立体图。
18.图3为本实用新型一种用于钢琴教学的基础指法辅助训练机器人的直线滑台模组立体图。
19.图4为本实用新型一种用于钢琴教学的基础指法辅助训练机器人的直线滑台模组剖视图。
20.图5为本实用新型一种用于钢琴教学的基础指法辅助训练机器人的机械手模组第一立体图。
21.图6为本实用新型一种用于钢琴教学的基础指法辅助训练机器人的机械手模组第二立体图。
22.图7为本实用新型一种用于钢琴教学的基础指法辅助训练机器人的伸缩模块与手指橡胶环连接处放大图。
23.其中,1-钢琴;2-总控制器;3-固定架;4-直线滑台模组;5-机械手模组;41-伺服电机;42-同步带;43-滑台;44-滑台座;45-第一同步轮;46-第二同步轮;51-控制模块;52-伸缩模块;53-伸缩模块支架;54-手指橡胶环;55-手臂支架;56-皮套支撑架;57-皮套;58-长圆孔;431-滚轮;441-柱形轨道;521-吊环;541-吊耳。
具体实施方式
24.为达成上述目的及功效,本实用新型所采用的技术手段及构造,结合附图就本实用新型较佳实施例详加说明其特征与功能。
25.如图1-7所示,本实用新型中提供了一种用于钢琴教学的基础指法辅助训练机器人,包括固定架3,所述固定架3上设置有直线滑台模组4;所述直线滑台模组4上设置有机械手模组5;所述机械手模组5包括手臂支架55;所述手臂支架55为椭圆形,采用刚性材料制作而成;所述手臂支架55上固定连接有伸缩模块支架53;所述伸缩模块支架53下方设置有五个伸缩模块52;每个伸缩模块52的输出端均设置有手指橡胶环54;所述伸缩模块支架53上方设置有用于控制伸缩模块52动作的控制模块51;还包括总控制器2,所述总控制器2分别与控制模块51、直线滑台模组4电连接。
26.所述直线滑台模组4设置有两个,呈对称设置;每个直线滑台模组4上均设置有一个机械手模组5;两个机械手模组5分别与人的左右手相适配。
27.在另一实施例中,所述直线滑台模组4采用同步带式或滚珠螺杆式。滚珠螺杆式可采用标准件,如雷子科技de50型号。
28.在本实施例中,采用同步带式。所述直线滑台模组4包括滑台座44、滑台43、同步带42和伺服电机41;所述伺服电机41与总控制器2电连接;所述伺服电机41与滑台座44一端侧面固定连接;所述伺服电机41的电机轴伸入滑台座44内部,并设置有第一同步轮45;所述滑台座44另一端内部转动设置有第二同步轮46;所述同步带42与第一同步轮45和第二同步轮46相适配;所述同步带42与滑台43固定连接;所述滑台座44外部两侧均设置有柱形轨道441;所述滑台43底部两侧均转动设置有至少两个滚轮431;所述滚轮431与所述柱形轨道441相适配。所述手臂支架55底部与滑台43顶部固定连接。
29.在另一实施例中,所述手臂支架55内侧固定设置有皮套支撑架56,所述皮套支撑架56两端均固定设置有用于固定手臂的皮套57,以提高手臂舒适度。
30.在另一实施例中,所述伸缩模块52输出端设置有吊环521;所述手指橡胶环54侧壁上设置有吊耳541,所述吊耳541穿射于吊环521的孔内。此设置可使手指橡胶环54能够活动,提高手指的舒适度及自由度。
31.在另一实施例中,所述伸缩模块52采用气缸、电缸、液压缸中的一种,本实施例采用电缸;当采用气缸时,需配备外接气源;当采用液压缸时,需配备液压站。
32.在另一实施例中,所述伸缩模块支架53上设置有多个长圆孔58,用于调节伸缩模块52的位置,以适应不同人的手指。本实施例中,中指和无名指可左右调节,小指和食指可前后调节,大拇指固定不调节。调整好位置后使用螺母锁紧伸缩模块。
33.在另一实施例中,所述固定架3底部设置有可调节地脚(图中未画出),以适应不同高度的钢琴。
34.安装时,将固定架3靠近钢琴1,调整可调节地脚,以使机械手模组5靠近钢琴1的琴键。将总控制器2临近布置,用电脑把人工调试好的指法训练程序下载进总控制器2中,开启设备,把双手的手指放入两个机械手模组5的手指橡胶环54中。总控制器2中内置语音系统,使用语音开启播放模式,设备开始运动,人眼睛看着指法训练的五线谱,人的手开始被引导,手腕移动到指定的位置,(手指戴上了手指环)手指开始进行有规律按下与弹起(只弹白键)。手腕与手指不断的运动,产生了弹奏的有旋律的声音,人的耳朵不断的听到声音。人用
设备对同一指法训练程序,进行重复的使用就会产生大量的记忆(肌肉记忆、听觉记忆、视觉记忆)达到人工教学的“手把手”效果。
35.以上所述仅为本实用新型较佳实施例而已,非全部实施例,任何人应该得知在本实用新型的启示下做出的结构变化,凡是与本实用新型具有相同或者相近似的技术方案,均属于本实用新型的保护范围。