1.本发明涉及模拟飞行教学领域,尤其涉及到一种基于无人机模拟飞行的训练管理方法和电子设备。
背景技术:
2.随着无人机行业的发展壮大与应用的越来越广泛,针对无人机的教学也逐渐出现在众多高校中,无人机的教学主要包括理论培训以及实际操作培训两部分。
3.实际操作培训主要对学员的打杆操作进行培训,相关技术中,通常基于模拟环境下的无人机的最优飞行轨迹对学员进行实际操作培训及训练结果评估,但现有基于无人机模拟飞行的训练管理方法难以对实际操作培训过程所产生的数据进行有效的统计分析及管理,无法对学员的训练情况及时进行数据反馈,导致对学员的摇杆控制能力的训练效果不佳。
技术实现要素:
4.为了解决现有基于无人机模拟飞行的训练管理方法难以对实际操作培训过程所产生的数据进行有效的统计分析及管理,无法对学员的训练情况及时进行数据反馈的缺陷,本发明提供了一种基于无人机模拟飞行的训练管理方法和电子设备。
5.第一方面,为了解决上述技术问题,本发明提供了一种基于无人机模拟飞行的训练管理方法,包括:
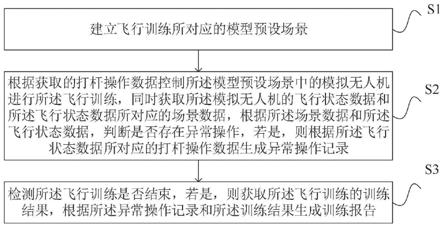
6.建立飞行训练所对应的模型预设场景;
7.根据获取的打杆操作数据控制所述模型预设场景中的模拟无人机进行所述飞行训练,同时获取所述模拟无人机的飞行状态数据和所述飞行状态数据所对应的场景数据,根据所述场景数据和所述飞行状态数据,判断是否存在异常操作,若是,则根据所述飞行状态数据所对应的打杆操作数据生成异常操作记录;
8.检测所述飞行训练是否结束,若是,则获取所述飞行训练的训练结果,根据所述异常操作记录和所述训练结果生成训练报告。
9.本发明的有益效果是:通过建立模型预设场景实现针对学员的摇杆控制能力的无人机模拟飞行训练,能够对训练过程所产生的数据实时进行统计分析,并基于打杆操作数据实现对学员的打杆操作过程的监测评估,能够对学员的训练情况及时进行数据反馈,实现基于无人机模拟飞行的训练管理,进而有效提升对学员的摇杆控制能力的训练效果。
10.进一步,所述建立飞行训练所对应的模型预设场景,包括:
11.根据所述飞行训练所对应的模型预设场景信息,利用虚幻引擎建立模拟环境和模拟无人机,得到所述模型预设场景。
12.采用上述改进方案的有益效果是:利用虚幻引擎能够快速搭建飞行训练所需的模型预设场景信息,且便于采集训练过程所产生的数据,避免使用真实环境下的无人机进行训练存在的无人机损坏的风险。
13.进一步,所述检测所述飞行训练是否结束包括:
14.根据所述模拟环境中的碰撞模型,对所述模拟无人机进行碰撞检查,若碰撞检查不通过,则判定所述飞行训练结束。
15.采用上述改进方案的有益效果是:通过设置碰撞模型和碰撞检查,能够有效训练并评估学员的摇杆控制能力。
16.进一步,所述飞行训练包括悬停训练、降落训练和8字形飞行训练中的至少一种,所述对所述模拟无人机进行碰撞检查,包括:
17.所述飞行训练包括悬停训练时,所述碰撞模型包括预设尺寸的多面体,检测位于所述多面体内部的无人机的边缘与所述多面体的边缘是否发生接触,若是,则判定碰撞检查不通过;
18.所述飞行训练包括降落训练时,所述碰撞模型包括所述模拟环境中的地面,检测所述无人机的边缘是否与所述模拟环境中的地面发生接触,若是,则判定碰撞检查不通过;
19.所述飞行训练包括8字形飞行训练时,所述碰撞模型包括预设数量的路障和降落板,所述路障设于所述模拟环境中的8字形路线中,所述降落板设于所述8字形路线的终点位置,判断所述无人机的边缘是否与所述降落板的表面发生接触,得到检测结果,若所述检测结果为所述模拟无人机的边缘没有与所述模拟环境中的每个所述路障的边缘均存在接触,则判定碰撞检查不通过。
20.采用上述改进方案的有益效果是:基于模拟环境实现了多种针对学员打杆操作的训练模式,能够进一步对学员的摇杆控制能力进行有效训练及评估。
21.进一步,当所述飞行训练包括降落训练且判定所述碰撞检查通过时,所述检测所述飞行训练是否结束,还包括:
22.检测所述模拟无人机的边缘是否与所述模拟环境中的每个悬停板的表面均存在接触,若是,则判定所述飞行训练结束。
23.采用上述改进方案的有益效果是:通过在模拟环境中设置多个悬停板,实现基于无人机模拟飞行的降落训练,相较在真实环境下进行训练,能够降低成本,且便于对训练过程进行实时的监测及数据采集。
24.进一步,所述模拟无人机的建立过程,包括:
25.根据所述模型预设场景信息所对应的真实飞行参数建立物理模型,将所述物理模型输入至所述虚幻引擎,得到所述模拟无人机。
26.采用上述改进方案的有益效果是:实现模拟无人机对真实环境下的飞行状态的仿真,进一步提升对学员摇杆控制能力的训练效果。
27.进一步,所述根据所述场景数据和所述飞行状态数据,判断是否存在异常操作,包括:
28.判断所述场景数据、所述飞行状态数据和所述飞行状态数据所对应的打杆操作数据是否符合预设的飞行训练规则,若否,则判定存在异常操作,其中,所述飞行状态数据包括飞行速度数据、飞行高度数据中的至少一种,所述场景数据包括飞行环境温度数据、飞行环境湿度数据、飞行环境气压数据中的至少一种。
29.采用上述改进方案的有益效果是:通过建立的模型预设场景,实现对学员在不同模拟环境中的打杆操作的训练及过程监测,进一步提升对学员摇杆控制能力的训练效果。
30.进一步,所述训练结果包括训练时长、训练任务完成度和打杆操作统计数据中的至少一种,所述根据所述异常操作记录和所述训练结果生成训练报告,包括:
31.根据所述训练结果计算训练成绩,获取所述异常操作记录所对应的基准操作演示数据,基于所述训练结果、所述异常操作记录、所述训练成绩和所述基准操作演示数据生成所述训练报告。
32.采用上述改进方案的有益效果是:实现对学员的摇杆控制能力的综合分析及量化,并能够对学员在训练过程中的实际打杆操作进行有针对性的教学指导,有效提高学员的摇杆控制能力。
33.进一步,所述打杆操作数据包括操作面板的油门摇杆和方向摇杆的操作偏移量。
34.采用上述改进方案的有益效果是:通过操作偏移量准确反映学员的实际打杆操作,进一步实现对学员的摇杆控制能力的训练管理。
35.第二方面,本发明提供了一种电子设备,包括存储器、处理器及存储在所述存储器上并在所述处理器上运行的程序,所述处理器执行所述程序时实现上述任一种基于无人机模拟飞行的训练管理方法的全部或部分步骤。
附图说明
36.图1为本发明实施例提供的一种基于无人机模拟飞行的训练管理方法的流程示意图;
37.图2为本发明实施例提供的设有圆锥形路障和降落板的8字形路线的示意图;
38.图3为本发明实施例提供的操作面板的方向摇杆的示意图;
39.图4为本发明实施例提供的一种电子设备的结构示意图。
具体实施方式
40.下列实施例是对本发明的进一步解释和补充,对本发明不构成任何限制。
41.以下结合附图描述本发明实施例的一种基于无人机模拟飞行的训练管理方法。
42.参照图1所示,本发明提供了一种基于无人机模拟飞行的训练管理方法,包括如下步骤s1至步骤s3。
43.在步骤s1中,建立飞行训练所对应的模型预设场景。
44.具体地,在该实施例中,所述模型预设场景包括模拟无人机和模拟环境,该模拟环境根据飞行训练的需要进行搭建,例如飞行训练需要空旷无人的场地,则可根据真实环境下的户外场景对模拟环境进行搭建,模拟无人机可根据输入的打杆操作数据在该模拟环境中实现模拟飞行,从而通过建立模型预设场景实现针对学员的摇杆控制能力的无人机模拟飞行训练。
45.可选的,在一个实施例中,所述建立飞行训练所对应的模型预设场景,包括:
46.根据所述飞行训练所对应的模型预设场景信息,利用虚幻引擎建立模拟环境和模拟无人机,得到所述模型预设场景。
47.可以理解的是,模型预设场景信息用于描述飞行训练所需的模拟环境和模拟无人机,所述模型预设场景信息可包括环境温度、环境湿度、环境气压等用于描述所需构建的模拟环境的参数数据以及无人机类型、无人机贴图等用于描述所需构建的模拟无人机的参数
数据。
48.具体地,在该实施例中,根据模型预设场景信息利用unreal(unreal engine,虚幻引擎)提供的基本物理环境以及灯光搭建三维的物理场景,并可根据实际场景开发定制化材质以构建飞行训练所需的模拟环境。
49.示例性地,在将模拟环境搭建为真实环境下的户外训练场景时,可利用unreal中的平行光(directional light)和漫反射(sky light)模拟真实阳光效果,并为模拟无人机的无人机贴图设置真实漫反射,以使搭建的户外训练场景接近真实物理环境。
50.其中,由于搭建的模拟环境是一个三维物理空间,因此可通过三维坐标向量描述模拟无人机的具体位置,具体可通过调用虚幻引擎的接口getactortransforma()获取模拟无人机的空间信息,其中location字段可获取模拟无人机的空间坐标,该空间坐标为三维向量形式,例如将模拟无人机起飞点记录为水平原点,起飞后,z轴上的偏移量即可作为模拟无人机的飞行高度,运动过程中,记录每个坐标轴上的偏移量,再除以记录的运动时间,即可获取模拟无人机在各个坐标轴方向上的运动速度,而rotation字段可获取在各个坐标轴方向上的旋转量,基于该旋转量可对应计算出pitch,yaw,roll的旋转角度,从而能够实现对模拟无人机的飞行状态的实时数据采集。
51.可选的,所述模拟无人机的建立过程,包括:
52.根据所述模型预设场景信息所对应的真实飞行参数建立物理模型,将所述物理模型输入至所述虚幻引擎,得到所述模拟无人机。
53.需要说明的是,所述真实飞行参数用于描述无人机在真实场景下的飞行状态,例如模型预设场景信息描述的是a类型的模拟无人机以及具有真实环境重力的模拟环境,则记录a类型的无人机在具有相同重力作用的真实场景下的重力加速度和重量作为所述真实飞行参数。
54.作为一种可能的实施方式,为保证对学员的打杆操作的训练效果,考虑到无人机在真实环境具有一定重量,在重力的作用下会做自由落体运动,因此在模拟环境中,可以根据预先记录的真实飞行参数,构建具有垂直向下的重力的物理模型,从而仿真出无人机自由落体的运动效果。
55.其中,为防止模拟无人机自由落体过快影响飞行训练的效果,可为模拟无人机的物理模型设置一定的上升力,该上升力应小于对模拟无人机设置的重力,以使在没有遥控器输入的情况下,模拟无人机能够缓慢降落。
56.在步骤s2中,根据获取的打杆操作数据控制所述模型预设场景中的模拟无人机进行所述飞行训练,同时获取所述模拟无人机的飞行状态数据和所述飞行状态数据所对应的场景数据,根据所述场景数据和所述飞行状态数据,判断是否存在异常操作,若是,则根据所述飞行状态数据所对应的打杆操作数据生成异常操作记录。
57.在该实施例中,模拟无人机可根据输入的打杆操作数据在模拟环境中基于匹配的预设动作实现模拟飞行,从而通过建立模型预设场景实现针对学员的摇杆控制能力的无人机模拟飞行训练。
58.示例性地,该预设动作包括六个方向上的旋转动作,打杆操作数据包括遥控器的操作面板中例如摇杆的输入信号,当接收到遥控器左边摇杆左右方向的输入信号,模拟无人机绕z轴顺时针或逆时针旋转,实现偏航角(yaw)功能;当接收到遥控器右边摇杆左右方
向的输入信号,无人机绕x轴顺时针或逆时针旋转,实现翻滚角(roll)功能;当接收到遥控器右边摇杆前后方向的输入信号,无人机绕y轴顺时针或逆时针旋转,实现俯仰角(pitch)功能,类似地,所述模拟无人机也可根据预设动作对操作面板中拨动开关的输入信号进行响应。
59.可以理解的是,实际的打杆操作应根据雨天、雪天、沙尘、雾霾以及落叶等不同的环境进行调整,因此可根据获取的场景数据和飞行状态数据,实现对学员在不同场景下的打杆操作的评估。
60.示例性地,场景数据包括天气类型、雨量值和无人机类型,在雨天飞行时,若雨量值大于30%时,类型b的无人机的飞行状态数据应为降落状态,若雨量值不大于30%,类型b的无人机的飞行状态数据应为视距内飞行状态,因此当场景数据和飞行状态数据不匹配时,则可判定出现异常操作,类似地,也可基于例如预设的风力值和风向值的阈值等,根据获取的飞行状态数据进行相应的异常操作判断。
61.作为一种可能的实施方式,考虑到真实的物理场景中,如果无人机飞行过程在pitch和roll方向上旋转浮动过大时,会造成螺旋桨产生的推动力无法克服重力,进而出现无人机失控的现象,因此可对当前模拟环境中的模拟无人机根据预先记录的真实飞行参数设置匹配的旋转量阈值,该匹配的旋转量阈值被记录于当前模拟环境中的飞行状态数据所对应的场景数据中,当获取的模拟无人机的飞行状态数据中的旋转量大于其对应的旋转量阈值时,则将模拟无人机的机体旋转角度自动调整为初始值例如调整为零,调整过程中将不响应遥控器的输入,并根据该旋转量对应的打杆操作数据生成异常操作记录。
62.可选的,在一个实施例中,所述根据所述场景数据和所述飞行状态数据,判断是否存在异常操作,包括:
63.判断所述场景数据、所述飞行状态数据和所述飞行状态数据所对应的打杆操作数据是否符合预设的飞行训练规则,若否,则判定存在异常操作,其中,所述飞行状态数据包括飞行速度数据、飞行高度数据中的至少一种,所述场景数据包括飞行环境温度数据、飞行环境湿度数据、飞行环境气压数据中的至少一种。
64.在该实施例中,通过判断场景数据、飞行状态数据和飞行状态数据所对应的打杆操作数据是否符合预设的飞行训练规则,从而能够训练学员在异常情况下,也即是在飞行速度数据、飞行高度数据、飞行环境温度数据、飞行环境湿度等数据出现异常时对遥控器的操控能力。
65.示例性地,当模拟无人机出现飞行高度超高的异常情况,也即是获取的无人机的飞行高度数据大于飞行训练规则中设置的高度阈值时,则记录学员对飞行高度超高状态的模拟无人机的打杆操作,并将该打杆操作与飞行训练规则所记载的飞行高度超高情况下的基准打杆操作进行比对,从而判断学员对无人机飞行高度超高情况下的的处理过程是否存在不符合预设的飞行训练规则的异常操作。
66.类似地,当模拟无人机出现例如飞行温度较低的异常情况,也即是获取的无人机的飞行环境温度数据小于飞行训练规则中设置的温度阈值时,则记录学员对飞行温度较低状态的模拟无人机的打杆操作,并将该打杆操作与飞行训练规则所记载的飞行温度较低情况下的基准打杆操作进行比对,从而判断学员对无人机飞行温度较低情况下的处理过程是否存在不符合预设的飞行训练规则的异常操作。
67.在步骤s3中,检测所述飞行训练是否结束,若是,则获取所述飞行训练的训练结果,根据所述异常操作记录和所述训练结果生成训练报告。
68.其中,该训练报告用于反映学员的训练情况,可使用图表等形式进行数据展示。
69.可选的,在一个实施例中,所述检测所述飞行训练是否结束包括:
70.根据所述模拟环境中的碰撞模型,对所述模拟无人机进行碰撞检查,若碰撞检查不通过,则判定所述飞行训练结束。
71.在该实施例中,可利用虚幻引擎生成collision component类型的多边体以包裹模拟无人机,并生成collision component类型的碰撞模型,通过检测模拟无人机外围的多边体是否与碰撞模型有空间上的重合以实现碰撞检查。
72.可选的,在一个实施例中,所述飞行训练包括悬停训练、降落训练和8字形飞行训练中的至少一种,所述对所述模拟无人机进行碰撞检查,包括:
73.所述飞行训练包括悬停训练时,所述碰撞模型包括预设尺寸的多面体,检测位于所述多面体内部的无人机的边缘与所述多面体的边缘是否发生接触,若是,则判定碰撞检查不通过;
74.所述飞行训练包括降落训练时,所述碰撞模型包括所述模拟环境中的地面,检测所述无人机的边缘是否与所述模拟环境中的地面发生接触,若是,则判定碰撞检查不通过;
75.所述飞行训练包括8字形飞行训练时,所述碰撞模型包括预设数量的路障和降落板,所述路障设于所述模拟环境中的8字形路线中,所述降落板设于所述8字形路线的终点位置,判断所述无人机的边缘是否与所述降落板的表面发生接触,若是,则检测所述模拟无人机的边缘是否与所述模拟环境中的每个所述路障的边缘均存在接触,得到检测结果,若所述检测结果为所述模拟无人机的边缘没有与所述模拟环境中的每个所述路障的边缘均存在接触,则判定碰撞检查不通过。
76.可选的,当所述飞行训练包括降落训练且判定所述碰撞检查通过时,所述检测所述飞行训练是否结束,还包括:
77.检测所述模拟无人机的边缘是否与所述模拟环境中的每个悬停板的表面均存在接触,若是,则判定所述飞行训练结束。
78.其中,悬停训练主要是训练学员操作无人机在空中悬停的能力,悬停过程要保持一定的高度,同时无人机的位置与初始位置的距离不能大于预设的距离阈值。
79.作为一种可能的实施方式,在飞行训练的模拟环境中,建立了一个圆柱体(该圆柱体对学员是不可见的),圆柱体的预设尺寸根据训练需要自由设置,模拟无人机放置于圆柱体底部中心位置,圆柱体边缘设有碰撞检查,模拟无人机一旦飞得太高或者偏离超出圆柱侧壁,也即是接触圆柱体的顶部或者侧壁,将判定碰撞检查不通过,悬停任务结束,并记录本次悬停时间。
80.其中,降落训练主要训练学员控制无人机精准降落的操作能力,无人机飞行中要依次降落到模拟环境中的悬停板,与降落训练对应的模拟无人机会出现惯性飞行过程中的漂移现象,因此学员需要通过控制油门摇杆和方向摇杆以准确控制无人机飞行路径。
81.作为一种可能的实施方式,在飞行训练的模拟环境中,设置8个悬停板,高度从下到上,逐渐变小,悬停难度逐渐增加,悬停板表面设有碰撞检查,一旦无人机降落到悬停板,则生成该悬停板对应的悬停任务成功记录,当完成所有悬停板的悬停任务后,需要将模拟
无人机远距离飞行到最终的红色悬停板上,成功着落,则判定降落任务成功,并计算任务用时,而在飞行过程中,一旦模拟无人机接触地面,则判定碰撞检查不通过,任务失败,需要重新开始任务。
82.其中,8字形飞行训练需要学员控制无人机沿着场地中的8字形路线飞行。
83.作为一种可能的实施方式,在飞行训练的模拟环境中,设置8字形路线,该8字形路线可按照驾驶员及机长等级考试要求进行设置,例如8字形路线的两个圆设置为直径(直径应大于6米)相同,且两个圆的结合部位,也即是8字形路线上的中点位置设置为通过“8字”的中线,在8字形飞行训练过程中,模拟无人机应从悬停位置(8字形路线上的中点位置)任选一方向(8字形路线的其中一个圆的方向)沿8字形路线进行飞行,模拟无人机完成8字形路线的飞行后,将模拟无人机降落至8字形路线的终点位置并判定8字形飞行任务成功,计算任务用时,其中,该终点位置可设置在8字形路线上,也可设置于8字形路线外。
84.示例性地,在8字形路线上设置11个圆锥形路障,如图2所示的空心点1-11表示设置的所述11个圆锥形路障,空心点1设置在8字形路线的起点位置,也即是8字形路线上的中点位置,学员需要控制悬停于空心点1所示圆锥形路障上方的模拟无人机(此时模拟无人机不与圆锥形路障接触)进入8字形路线,同时记录模拟无人机的出发时间,并按照11个空心点所示的2-3-4-5-6-7-8-9-10-11-1的序号顺序控制模拟无人机依次接触11个圆锥形路障,并记录模拟无人机与每个圆锥形路障发生接触的时间,圆锥形路障顶部做了碰撞检查,模拟无人机接触11个圆锥形路障,并最终降落到终点位置的降落板上,则判定8字形飞行训练任务成功,并根据记录的出发时间及与圆锥形路障发生接触的时间计算任务用时,若到达终点的模拟无人机未接触全部的圆锥形路障,则判定碰撞检查不通过,任务失败,需要重新开始任务。
85.可选的,在一个实施例中,所述训练结果包括训练时长、训练任务完成度和打杆操作统计数据中的至少一种,所述根据所述异常操作记录和所述训练结果生成训练报告,包括:
86.根据所述训练结果计算训练成绩,获取所述异常操作记录所对应的基准操作演示数据,基于所述训练结果、所述异常操作记录、所述训练成绩和所述基准操作演示数据生成所述训练报告。
87.在该实施例中,训练任务完成度用于描述学员对训练任务的完成情况,其计算规则根据实际需要灵活设置,打杆操作统计数据包括训练过程中学员输入的所有打杆操作数据,学员每次进行飞行训练,都将记录学员的训练时长,并在完成训练后,生成训练任务完成度和打杆操作统计数据,得到训练结果并上传至后台服务器,教师可通过访问后台服务器查看学员的训练结果并对学员的训练情况进行打分,后台服务器也可根据预设的评分标准,基于训练结果自动计算成绩,并生成训练报告。
88.其中,后台服务器可为存储的数据提供数据处理功能,例如可将学员的训练时长进行累加得到训练总时长,以及根据训练成绩进行排名等,从而可对学员的训练情况进行及时的数据反馈及数据管理,实现对学员的摇杆控制能力的综合分析及量化,并能够对学员在训练过程中的实际打杆操作进行有针对性的教学指导,有效提高学员的摇杆控制能力。
89.可选的,所述打杆操作数据包括操作面板的油门摇杆和方向摇杆的操作偏移量。
90.需要说明的是,操作偏移量表示遥控器操作面板上的摇杆位置相较初始位置的偏移量,该初始位置指摇杆未受拨动时所在的位置,该操作偏移量包括对油门摇杆上下拨杆的幅度和方向摇杆在x轴和y轴方向上的偏移量。
91.示例性地,如图3所示,实心点位置表示方向摇杆位置,坐标轴原点o为方向摇杆的初始位置,矩形区域表示方向摇杆的可移动范围,学员拨动方向摇杆,实心点会对应在矩形区域内移动,记录实心点位置相较坐标轴原点o在x轴和y轴上的偏移量,得到方向摇杆在x轴和y轴方向上的偏移量。
92.其中,该操作偏移量用于评估学员控制摇杆的能力,有利于对学员的打杆操作进行指导,例如在悬停训练中,可以规定良好的飞行记录,油门摇杆上下拨杆的幅度不能超过30%,方向摇杆x轴和y轴上的偏移量不得超过预设的偏移阈值,从而能够基于操作偏移量评估学员控制摇杆的能力,训练结束后,学员可根据记录的操作偏移量,详细的了解到自己训练过程中的错误原因,有效提高训练成绩。
93.上述实施例提供的基于无人机模拟飞行的训练管理方法,通过建立模型预设场景实现针对学员的摇杆控制能力的无人机模拟飞行训练,能够对训练过程所产生的数据实时进行统计分析,并基于打杆操作数据实现对学员的训练过程的监测评估,从而对学员的训练情况能够及时进行数据反馈,实现基于无人机模拟飞行的训练管理,进而有效提升学员的摇杆控制能力的训练效果。
94.在上述各实施例中,虽然对步骤进行了编号,如s1、s2等,但只是本技术给出的具体实施例,本领域的技术人员可根据实际情况调整s1、s2等的执行顺序,此也在本发明的保护范围内,可以理解,在一些实施例中,可以包含如上述各实施方式中的部分或全部。
95.如图4所示,本发明实施例的一种电子设备500,包括存储器510、处理器520及存储在所述存储器510上并在所述处理器520上运行的程序530,所述处理器520执行所述程序530时实现上述任一实施的一种基于无人机模拟飞行的训练管理方法的步骤。
96.其中,电子设备500可以选用电脑、手机等,相对应地,其程序530为电脑软件或手机app等,且上述关于本发明的一种电子设备500中的各参数和步骤,可参考上文中基于无人机模拟飞行的训练管理方法的实施例中的各参数和步骤,在此不做赘述。
97.所属技术领域的技术人员知道,本发明可以实现为系统、方法或计算机程序产品。因此,本公开可以具体实现为以下形式,即:可以是完全的硬件、也可以是完全的软件(包括固件、驻留软件、微代码等),还可以是硬件和软件结合的形式,本文一般称为“电路”、“模块”或“系统”。此外,在一些实施例中,本发明还可以实现为在一个或多个计算机可读介质中的计算机程序产品的形式,该计算机可读介质中包含计算机可读的程序代码。
98.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
99.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例
性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。