1.本实用新型涉及直升机模拟器技术领域,具体涉及一种用于直升机模拟器仿真驾驶杆提供力感的装置。
背景技术:
2.国内飞行学员在通过模拟软件进行直升机训练时,没有类似模拟操作装置,无法感受真实直升飞机的操控方式。另外,国外有设计模拟操作装置,但都是利用一些真实飞机的件组合而成,虽然达到了模拟真实飞机防火操作,但是成本昂贵,经济性差。
3.同时,目前在国内使用较多的直升机驾驶杆操作装置大都是赛钛客生产的,该装置主要由塑料材质生产,不但在力度及外形上与真机相差较大,而且在使用过程中还容易被损坏折断,从而致使在模拟飞行器领域,特别是小型飞机模拟飞行器领域,大部分停留在游戏型操控层面。因此,提供一种经济、可靠的操作装置,能在模拟飞行运动或飞行员培训中,让操作人员感受到真实直升机的驾驶感觉,是现阶段本技术人员亟需解决的问题。
技术实现要素:
4.本实用新型需要解决的技术问题是提供一种用于直升机模拟器仿真驾驶杆提供力感装置,不但经济、可靠,还能在模拟飞行运动或飞行员培训中,让操作人员感受到真实直升机的驾驶感觉。
5.为解决上述技术问题,本实用新型所采取的技术方案如下。
6.一种用于直升机模拟器仿真驾驶杆提供力感装置,包括固定框架焊接组合和摇杆;所述固定框架焊接组合为焊接的框架结构;所述摇杆通过固定在固定框架焊接组合上表面的轴承转动设置在固定框架焊接组合的上表面,其中,所述摇杆上通过间隔开设的两个通孔对称穿设有一对可在摇杆内自由摆动的拐杖型弯管,弯管的顶端设置有驾驶杆手柄;所述摇杆的右端头通过固定设置的曲柄铰接有垂直于摇杆设置、用于采集驾驶杆手柄沿前后方向位移量的第二直线电位器;所述摇杆的左端头通过固定设置的曲柄铰接的第二曲柄连杆连接有平行于摇杆设置、用于对驾驶杆手柄沿前后方向的运动施加反向阻力的第二伺服电机;所述固定框架焊接组合的中部通过左右旋转支架枢接有位于两个弯管底端之间的t字型左右转动焊接组合;所述左右转动焊接组合的横体两端分别通过铰接的连杆与摇杆的下端头铰接;所述左右转动焊接组合的纵体的底部铰接有平行于摇杆设置、用于采集驾驶杆手柄沿左右方向位移量的第一直线电位器,左右转动焊接组合的纵体的顶部通过铰接的第一曲柄连杆连接有垂直于摇杆设置、用于对驾驶杆手柄沿左右方向的运动施加反向阻力的第一伺服电机;所述第一直线电位器和第二直线电位器的输出端连接有用于控制实现模拟直升机的飞行姿态的plc控制器,plc控制器的输出端连接第一伺服电机和第二伺服电机的受控端。
7.优选的,所述固定框架焊接组合的下表面固定设置有分别与第一直线电位器和第二直线电位器枢接的第一直线电位器固定支架和第二直线电位器固定支架。
8.优选的,所述第一伺服电机和第二伺服电机的转动轴分别与第一曲柄连杆和第二曲柄连杆固定连接。
9.优选的,所述第一伺服电机和第二伺服电机的转动轴上分别设置有用于采集电机转动轴扭转力矩的第一扭力传感器和第二扭力传感器,第一扭力传感器和第二扭力传感器的输出端均连接plc控制器的输入端。
10.优选的,所述摇杆上穿设有用于限定弯管摆动幅度的摇杆前固定座和与摇杆前固定座组合的摇杆后固定座组合;所述摇杆前固定座和摇杆后固定座组合与固定框架焊接组合的上表面固定连接并围设在弯管的四周。
11.优选的,所述固定框架焊接组合的两侧分别设置有一对位于曲柄两侧、用于限定曲柄摆动幅度的优力棒。
12.由于采用了以上技术方案,本实用新型所取得技术进步如下。
13.本实用新型采用优质钢组合而成,在使用时不易损坏且便于维修;通过设置的弯管和驾驶杆手柄,可组合成仿真的驾驶杆;通过设置的与弯管连接的第一直线电位器和第一伺服电机、与摇杆连接的第二直线电位器和第二伺服电机以及分别设置在第一伺服电机和第二伺服电机上的第一扭力传感器和第二扭力传感器,可通过plc控制器实现模拟直升机的前后(左、右)和俯仰(或横滚)的姿态,让操作人员感受到真实直升机的驾驶感觉。
附图说明
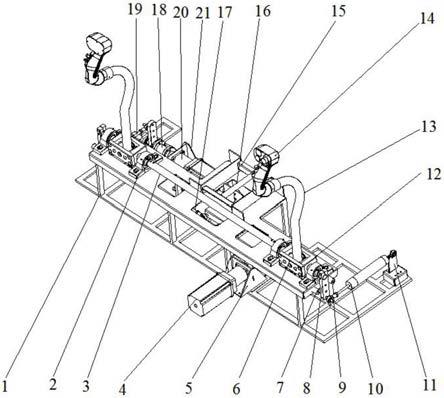
14.图1为本实用新型的结构示意图;
15.图2为本实用新型的正视图;
16.图3为本实用新型的左视图;
17.图4为本实用新型的俯视图。
18.其中:1.固定框架焊接组合、2.轴承、3.摇杆、4.第一伺服电机、5.第一电机固定座、6.摇杆前固定座、7.优力棒、8.曲柄、9.杆端关节轴承、10.第二直线电位器、11.第二直线电位器固定支架、12.摇杆后固定座组合、13.弯管、14.驾驶杆手柄、15.左右旋转支架、16.左右转动焊接组合、17.连杆、18.第二扭力传感器、19.第二曲柄连杆、20.第二伺服电机、21.第二电机固定座、22.第一直线电位器、23.第一直线电位器固定支架、24.第一曲柄连杆。
具体实施方式
19.下面将结合附图和具体实施方式对本实用新型进行进一步详细说明。
20.一种用于直升机模拟器仿真驾驶杆提供力感装置,结合图1至图4所示,包括固定框架焊接组合1、摇杆3、仿真驾驶杆和力感机构,其中,固定框架焊接组合1的上表面两端对称设置有轴承2;摇杆3穿设在轴承2内,与轴承2转动连接;仿真驾驶杆为两个,对称穿设在摇杆3中,仿真驾驶杆可在摇杆3中自由摆动;力感机构设置在固定框架焊接组合1和摇杆3上,力感机构用于采集仿真驾驶杆的位移量和为仿真驾驶杆施加反向阻力,力感机构连接有plc控制器,plc控制器通过控制力感机构,用于控制实现模拟直升机的飞行姿态,让操作人员感受到真实直升机的驾驶感觉。
21.固定框架焊接组合1为焊接的框架结构,采用优质钢材料,不易损坏。轴承2为四
个,每两个分别间隔设置在固定框架焊接组合1的上边面两端,每端的两个轴承2之间设置有摇杆前固定座6和摇杆后固定座组合12。摇杆前固定座6与摇杆后固定座组合12均与固定框架焊接组合1固定连接,摇杆前固定座6与摇杆后固定座组合12组合在一起围设成矩形框,摇杆后固定座组合12沿摇杆3长度方向设置的两个侧面开设有通孔,通孔用于穿过摇杆3。
22.摇杆3采用优质钢材料,不易损坏。摇杆3穿设在摇杆前固定座6和摇杆后固定座组合12中的部分均开设有通孔,通孔的直径略大于仿真驾驶杆穿设在摇杆3中的杆体的直径。
23.仿真驾驶杆包括弯管13和驾驶杆手柄14,其中,弯管13采用优质钢材料,不易损坏,弯管13为拐杖型,底端穿出摇杆3上开设的通孔伸入固定框架焊接组合1的内部,弯管13通过围设在四周的摇杆前固定座6和摇杆后固定座组合12限定摆动幅度;驾驶杆手柄14设置在弯管13的顶端,当摆动驾驶杆手柄14时,驾驶杆手柄14可通过弯管13带动摇杆3转动。由弯管13和驾驶杆手柄14组成的驾驶杆不但牢靠,还更接近真实直升机的驾驶杆。
24.力感机构包括与弯管13连接的第一直线电位器22和第一伺服电机4,以及与摇杆3连接的第二直线电位器10和第二伺服电机20。
25.摇杆3的右端头垂直向下固定设置有曲柄8;固定框架焊接组合1的下表面上在位于右侧曲柄8的后方位置固定设置有第二直线电位器固定支架11;第二直线电位器10垂直于摇杆3设置,第二直线电位器10的伸缩端通过杆端关节轴承9与曲柄8的开放端铰接,第二直线电位器10的底端与第二直线电位器固定支架11枢接。当驾驶杆手柄14带动摇杆3转动后,右侧曲柄8带动第二直线电位器10转动和伸缩,第二直线电位器10即可采集到驾驶杆手柄14沿前后方向的位移量。
26.摇杆3的左端头垂直向下固定设置有曲柄8;固定框架焊接组合1的下表面上在位于摇杆3左部的后方位置固定设置有第二电机固定座21;第二伺服电机20平行于摇杆3设置,并固定在第二电机固定座21上。左侧曲柄8和第二伺服电机20的转动轴之间设置有垂直于摇杆3的第二曲柄连杆19,第二曲柄连杆19的一端与左侧曲柄8铰接,第二曲柄连杆19的另一端与第二伺服电机20的转动轴固定连接。当驾驶杆手柄14带动摇杆3转动后,左侧曲柄8通过第二曲柄连杆19带动第二伺服电机20的转动轴转动。第二伺服电机20的转动轴上设置有第二扭力传感器18,第二扭力传感器18随第二伺服电机20的转动轴转动,即可采集到第二伺服电机20的转动轴的扭转力矩。
27.固定框架焊接组合1的两侧均设置有一对优力棒7,每侧的一对优力棒7分别位于曲柄8的两侧,优力棒7用于限定曲柄8的摆动幅度。
28.弯管13的底端均铰接有连杆17;固定框架焊接组合1的下表面上在位于摇杆3左部的正下方位置固定设置有第一直线电位器固定支架23,固定框架焊接组合1的下表面上在位于摇杆3右部固定设置有第一电机固定座5;固定框架焊接组合1的中部固定设置有左右旋转支架15,左右旋转支架15上枢接有位于两个弯管13底端中间的左右转动焊接组合16。
29.左右转动焊接组合16为t字型,左右转动焊接组合16横体的两侧分别与两根连杆17的开放端铰接。第一直线电位器22平行于摇杆3设置,第一直线电位器22的底端与第一直线电位器固定支架23枢接,第一直线电位器22的伸缩端与左右转动焊接组合16纵体的底部铰接。当驾驶杆手柄14带动连杆17左右摆动后,连杆17带动左右转动焊接组合16旋转,第一直线电位器22在左右转动焊接组合16的带动下转动和伸缩,即可采集到驾驶杆手柄14沿左
右方向的位移量。
30.第一伺服电机4垂直于摇杆3设置,并固定在第一电机固定座5上;第一伺服电机4和左右转动焊接组合16之间设置有第一曲柄连杆24,第一曲柄连杆24的一端与左右转动焊接组合16的纵体的顶部铰接,第一曲柄连杆24的另一端与第一伺服电机4的转动轴固定连接。当驾驶杆手柄14带动连杆17左右摆动后,连杆17带动左右转动焊接组合16旋转,第一伺服电机4的转动轴在左右转动焊接组合16的带动下转动。第一伺服电机4的转动轴上设置有第一扭力传感器,第一扭力传感器随第一伺服电机4的转动轴转动,即可采集到第一伺服电机4的转动轴的扭转力矩。
31.plc控制器的输入端连接第一直线电位器22、第二直线电位器10、第一扭力传感器和第二扭力传感器18的输出端,plc控制器的输出端连接第一伺服电机4和第二伺服电机20的受控端。plc控制器的内部预置有程序,根据第一直线电位器22、第二直线电位器10、第一扭力传感器和第二扭力传感器18采集的信息,控制第一伺服电机4对驾驶杆手柄14沿左右方向的运动施加反向阻力和控制第二伺服电机20对驾驶杆手柄14沿前后方向的运动施加反向阻力,最终达到模拟直升飞机的前后(左、右)和俯仰(或横滚)的姿态,使操作人员感受到真实直升机的驾驶感觉。
32.本实用新型在使用时,通过向操纵手柄14施加力,弯管13带动连杆17左右运动,摇杆3带动曲柄8前后运动;通过第一直线电位器22采集驾驶杆手柄14沿左右方向位移量,通过第二直线电位器10采集驾驶杆手柄14沿前后方向位移量,通过第一扭力传感器采集第一伺服电机4转动轴的扭转力矩,通过第二扭力传感器18采集第二伺服电机20转动轴的扭转力矩;plc控制器通过内置的程序分别计算出对第一伺服电机4和第二伺服电机20施加的反向阻力,从而实现模拟直升机的前后(左、右)和俯仰(或横滚)的姿态,并让操作人员感受到真实直升机的驾驶感觉。