1.本实用新型涉及机器人行走轨迹记录装置领域,尤其涉及一种用于室内机器人自主行走轨迹的记录装置。
背景技术:
2.目前无轨室内机器人自主行走轨迹记录的方案有激光陀螺仪、双目图像识别、激光雷达、定点设置有源和无源标识等定位法。其定点设置有源和无源标识等定位法布置要求高,实施成本高。激光陀螺仪、双目图像识别、激光雷达设备方案技术难度大、数据量大设备成本高,因此,不适合用于在机器人前期的研发工作中进行使用,也难以在各个高校或是民间的机器人爱好者群体内进行推广,适用性不高。
技术实现要素:
3.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种用于室内机器人自主行走轨迹的记录装置,从而解决现有技术中存在的问题。
4.为了实现上述目的,本实用新型采用了如下技术方案:
5.一种用于室内机器人自主行走轨迹的记录装置,包括墨盒,所述墨盒的内壁设有四个安装孔,每个所述安装孔内均固定连接有墨管,所述墨管的外侧设有套筒,所述套筒与墨盒的外壁固定连接,所述墨管的下侧设有底板,所述墨管的一端设有沉孔,所述沉孔内设有若干个钢珠,所述沉孔的孔底设有进墨孔,所述墨盒的内壁转动连接有挡板,所述挡板的一侧设有若干个通孔,所述通孔与进墨孔对应设置。
6.优选地,所述墨管包括第一墨管与第二墨管,所述第一墨管的一侧固定连接有滑块,所述第二墨管的一侧设有滑槽,所述滑块与滑槽滑动连接,所述墨管的外侧设有环形的缓冲板,所述缓冲板的内壁与第一墨管的外壁之间固定连接有若干个连接杆,所述套筒的内壁设有若干个第一避让槽,所述第一避让槽与连接杆对应设置并滑动连接,所述缓冲板与墨盒之间固定连接有缓冲弹簧优选地,所述底板的中部设有固定槽,所述墨管的一端设置在固定槽内并与固定槽固定连接,所述固定槽的底部设有锥形孔,所述锥形孔与钢珠对应设置。
7.优选地,所述沉孔的孔壁固定连接有固定环,所述固定环与沉孔的孔底之间固定连接有两个导向杆,两个所述导向杆之间设有堵头,所述导向杆穿过堵头并与堵头滑动连接,所述堵头与沉孔的孔底之间固定连接有复位弹簧。
8.优选地,所述墨盒的一侧设有第二避让槽,所述挡板的外壁固定连接有拨动杆,所述拨动杆穿过第二避让槽并与第二避让槽滑动连接。
9.优选地,所述第二避让槽的内壁两侧均设有弧形的定位槽,所述拨动杆的两侧均固定连接有定位柱,所述定位柱与定位槽对应设置并滑动连接。
10.本实用新型的优点在于:本实用新型所提供的一种用于室内机器人自主行走轨迹的记录装置通过设置墨盒、墨管、钢珠,将本装置固定在机器人的一侧后,能机器人在行走
时能够通过本装置在地面留下印记,不仅能够进行直观查看,同时造价成本低,适合在机器人研发的前期进行使用,同样也适合向高校大学生或是民间群体内的机器人爱好者进行推广,具有良好的市场前景。
附图说明
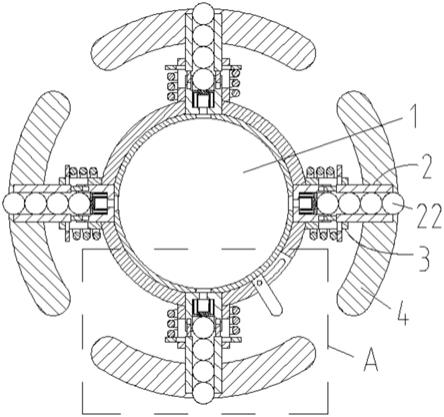
11.图1是本实用新型的基本结构示意图;
12.图2是图1中的a处局部放大图;
13.图3是图2中的b处局部放大图。
具体实施方式
14.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
15.实施例1
16.如图1-3所示,本实用新型提供的一种用于室内机器人自主行走轨迹的记录装置,包括墨盒1,墨盒1的一侧设置有注墨孔,用于向墨盒1内注入墨汁,墨盒1的另一侧转动连接有连接柱,连接柱通过螺丝与机器人固定连接,能够将本装置与机器人相固定,墨盒1的内壁设有四个安装孔,每个安装孔内均固定连接有墨管2,墨管2的外侧设有套筒3,套筒3用于对墨管2起到限位效果,套筒3与墨盒1的外壁固定连接,墨管2的下侧设有底板4,底板4用于与地面相接触,墨管2的一端设有沉孔21,沉孔21内设有若干个钢珠22,沉孔21的孔底设有进墨孔23,墨盒1的内壁转动连接有挡板5,挡板5的一侧设有若干个通孔51,通孔与进墨孔23对应设置,墨盒1的一侧设有第二避让槽11,挡板5的外壁固定连接有拨动杆52,拨动杆52穿过第二避让槽11并与第二避让槽11滑动连接,第二避让槽11的内壁两侧均设有弧形的定位槽111,拨动杆52的两侧均固定连接有定位柱521,定位柱521与定位槽111对应设置并滑动连接,定位柱521和定位槽111能够避免拨动杆52在转动的过程中发生偏移,起到定位的效果,墨汁能够通过通孔51进入到进墨孔23内,通过转动拨动杆52,拨动杆52在第二避让槽11内滑动,同时带动挡板5共同运动,能够使得通孔51的位置发生偏移,从而使得挡板5将进墨孔23遮挡住一部分,从而对进入岛进墨孔23内的墨汁量进行调整。
17.墨管2包括第一墨管201与第二墨管202,第一墨管201的一侧固定连接有滑块203,第二墨管202的一侧设有滑槽,滑块203和滑槽均呈环形,滑块203与滑槽滑动连接,墨管2的外侧设有环形的缓冲板24,缓冲板24的内壁与第一墨管201的外壁之间固定连接有若干个连接杆25,套筒3的内壁设有若干个第一避让槽31,第一避让槽31与连接杆25对应设置并滑动连接,缓冲板24与墨盒1之间固定连接有缓冲弹簧26,底板4的中部设有固定槽41,墨管2的一端设置在固定槽41内并与固定槽41固定连接,固定槽41的底部设有锥形孔42,锥形孔42与钢珠22对应设置,当底板4遇到地面上的凸起时,凸起会对底板4产生挤压,从而使得底板4通过固定槽41的槽底对第一墨管201造成挤压,使得第一墨管201向上运动,此时滑块203在滑槽内向上滑动,连接杆25在第一避让槽31内滑动,连接杆25又带动缓冲板24向上滑动并压缩缓冲弹簧26,从而使得缓冲弹簧26能够起到缓冲效果,避免机器人遇到不平整的地面时发生侧翻。
18.沉孔21的孔壁固定连接有固定环27,固定环27与沉孔21的孔底之间固定连接有两个导向杆28,两个导向杆28之间设有堵头29,堵头29的下侧设置为弧形并与钢珠22的一侧相抵,且堵头29的直径小于沉孔21的内径,使得堵头29与沉孔21的内壁之间具有一定缝隙,导向杆28穿过堵头29并与堵头29滑动连接,堵头29与沉孔21的孔底之间固定连接有复位弹簧291,初始状态下复位弹簧291处于压缩状态,将堵头29顶住,使得堵头29将固定环27堵住,避免墨汁进入到固定环27的下侧,正常使用时,底板4与地面相接触,地面对墨管2内部最下侧的钢珠22造成挤压,使得所有的钢珠22都被顶起,最上侧的钢珠22将堵头29顶起,使得堵头29沿着导向杆28向上滑动并进一步压缩复位弹簧291,此时堵头29不再对固定环27进行堵塞,从而使得墨汁能够从堵头29与沉孔21孔壁之间的缝隙中流下,并通过固定环27的中部流到钢珠22上,最后依附在最下方的钢珠22表面,并随着钢珠22的滚动在地面上留下线条,通过设置多个钢珠,能够避免流出墨管2的墨汁过多形成墨团,影响到轨迹图的绘制。
19.使用时,先转动拨动杆52来调节墨盒1进入到墨管2内的墨汁量,从而控制轨迹图的粗细程度,再将本实用新型与机器人相固定,并将机器人放置在铺好绘图纸的指定区域内,再启动机器人内设的程序使得机器人在区域内进行移动,本实用新型如图车轮一般随着机器人的移动而以墨盒1的中心为基准进行转动,转动时底板4与地面相接触,地面将钢珠22顶起,最上侧的钢珠22将堵头29顶起,使得墨汁能够从堵头29与沉孔21孔壁之间的缝隙中流下,并通过固定环27的中部流到钢珠22上,最后依附在最下方的钢珠22表面,并随着钢珠22的滚动在地面上留下线条,当底板4遇到地面上的凸起时,凸起会对底板4产生挤压,从而使得底板4通过固定槽41的槽底对第一墨管201造成挤压,使得第一墨管201向上运动,此时滑块203在滑槽内向上滑动,连接杆25在第一避让槽31内滑动,连接杆25又带动缓冲板24向上滑动并压缩缓冲弹簧26,从而使得缓冲弹簧26能够起到缓冲效果,避免机器人遇到不平整的地面时发生侧翻,对机器人起到保护作用,适合机器人的前期开发使用。
20.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。