1.本发明涉及无人机巡检技术领域,具体涉及一种电网自动巡检无人机目标挂点校准中转站。
背景技术:
2.国网公司明确提出将无人机巡检方式、机器人巡检方式、直升机巡检方式应用到输电线路的巡检工作当中,从而明显提升输电线路的在控、能控和可控能力。目前,多旋翼无人机现已广泛应用于架空输电线路巡视作业,极大提高了输电线路特别是山区线路传统人工巡视作业的质量和效率,无人机巡视逐步成为替代人工巡视的有效手段。视域良好情况下的输电线路巡线,飞手可通过目测及无人机实时图传视频信息,判断飞行环境,选择安全的飞行高度,然而在线路杆塔处于飞手视距范围以外的线路,单凭实时图传视频信息无法准确判断飞机航向、姿态、速度及周围环境,严重影响飞行安全和飞行效率。
3.现有技术中,通过无人机自动驾驶巡视算法技术研究、巡检大数据分析关键技术研究和多旋翼无人机自动驾驶巡线及成果试点应用,实现多旋翼无人机自主巡塔、自动避障和精细化巡视轨迹自主规划和自动采集,提高现有机巡作业效率和安全性,摆脱对人工的依赖。
4.但现有技术的缺陷在于:无人机自动巡检技术依赖全球定位系统的辅助,进行定位和导航,它的精度和稳定性直接影响到整个无人机的飞行工作。而电网野外杆塔所处环境复杂,极容易受坐标信号闪断或电磁干扰产生的坐标数据错误,导致无人机自动巡检导航出现偏移,产生事故。
5.不仅是航道偏移问题,在自动巡检需要中途或返航在机巢充电时,无人机需要进行降落,坐标数据错误更会导致降落时发生故障,产生的维修成本巨大。因此,需要在自动巡检过程中,辅助无人机进行坐标校准的工作,以避免无人机发生故障。
6.同时,工作人员在野外进行电网维护期间,如果出现某个零配件不足的情况,往返再取十分浪费时间,能依靠自动巡检无人机进行零配件调度的话,将极大便利维护工作。
技术实现要素:
7.本发明为了解决上述技术的不足,提供了一种电网自动巡检无人机目标挂点校准中转站。
8.本发明的技术方案:一种电网自动巡检无人机目标挂点校准中转站,该中转站包括起降平台、控制芯片、通信模块、太阳能蓄电模块及无人机无线充电模块,所述起降平台设有引导柱及数据线机械手,该引导柱包括沿水平面对称设置的上棱锥部和下棱锥部,该上棱锥部和下棱锥部的表面均设置有若干个小棱锥体,所述小棱锥体相对位于竖直上方的面为升面,相对位于竖直下方的面为降面,所述引导柱上的各个升面和降面,依照与起降平台表面之间的倾斜度不同,设置不同色彩,对应角度变化依次形成色彩组合列表,无人机于起降平台降落时,与起降平台之间的高度变化,拍摄引导柱角度随之变化,无人机根据各升
面降面的色彩变化信息,对应色彩组合列表,确定并修正自身与起降平台的位置关系;所述数据线机械手于无人机降落后插入无人机数据接口,以起降平台固定坐标校准无人机自身坐标偏差。
9.采用上述技术方案,通信模块用于远程数据、信号传输,便于工作人员远程控制。太阳能蓄电模块通过光伏板转换并储存电能,为各设备及无人机供电,控制芯片控制各装置启停动作。数据线机械手,即是在常规机械手机器人的爪部,设置数据接口,用于传输数据。无人机无线充电模块,为无人机补充电能,对应设置于降落终点处,便于衔接操作。均为现有技术不做详述。
10.本发明的引导柱,通过沿水平面对称设置的上棱锥部和下棱锥部分隔为两个部分,在无人机高度变化时,所能拍摄的画面,随各升面、降面的设置角度差异,会逐渐变化,根据角度预设在各升面、降面上不同的色彩组合,形成不同色彩组合的固定信息,如同二维码一般,无人机只需要通过摄像头识别当前色彩组合的图像,比对已有的角度表,便能识别出自身相对升降平台的高度位置关系。即使gps信号闪断,无人机坐标偏移,也能根据识别比对现场图像,程序自动引导降落。确保了无人机降落时的安全。
11.本发明的进一步设置:所述上棱锥部和下棱锥部相邻面之间的夹角小于90
°
。
12.本发明的进一步设置:所述起降平台上设有降落终点、降落传送带及位置传感器,该降落传送带衔接至降落终点,且设有特定色彩,所述数据线机械手、引导柱设置于降落终点处,所述小棱锥体相对升面降面还包括左面、右面,所述引导柱上的各个左面和右面,依照与降落传送带之间的角度不同,设置不同色彩,无人机于起降平台降落时,无人机根据所拍摄各升面降面的色彩变化信息、及识别终点传送带色彩轮廓信息,确定并修正自身与终点传送带的位置关系采用上述技术方案,为确保无人机降落位置为最终进行校准坐标和更换负载的位置,即形成一个统一的降落终点,所以通过各左面、右面的色彩信息辅助无人机位置与降落所述的对齐降落,然后由传送带送至降落终点停止。位置传感器沿传送带设置,检测到无人机降落,或来到降落终点,便由控制芯片控制传送带启停。
13.本发明的进一步设置:所述无人机底部可拆卸的设置有零部件包,所述起降平台内部设有零部件收纳室,所述中转站还包括设置于降落终点处的卸货装置及归库装置,所述卸货装置将零部件包由无人机上卸下或装上,所述归库装置衔接卸货装置,将零部件包存入或取出于零部件收纳室。
14.采用上述技术方案,无人机可拆卸的负载零部件包,便可以在巡线过程中,根据需要,调配、运输、储存零部件于各中转站,避免了维护人员跋涉而至,缺少某零部件的情况。
15.本发明的进一步设置:所述起降平台上设有衔接终点的装卸货凹槽,所述终点传送带位于装卸货凹槽两侧,无人机支撑脚分别位于两侧终点传送带上,零部件包位于装卸货凹槽正上方;所述零部件包包括收容腔及位于腔口处的连接座,该连接座与无人机底部螺丝连接;所述卸货装置位于装卸货凹槽内终点处,包括升降平台、升降气缸、气动固定爪、及对应零部件包螺丝位置设置的拧螺丝机构,所述气动固定座朝向零部件包底面的端部设有接触开关,该接触开关控制气动固定座夹住零部件包;所述拧螺丝机构拆卸螺丝。
16.采用上述技术方案,设置的装卸货凹槽结构,使无人机携带高度大于支撑架高度
的零部件包时,也能平稳降落。卸货机构,对零部件包进行拆卸并夹取。接触开关识别起点固定爪是否接触零部件包。
17.本发明的进一步设置:所述连接座对应螺丝设有通孔,对应螺丝螺帽处设有防落套,该螺丝常设于通孔内且螺帽卡于防落套与通孔之间;所述扭螺丝机构包括壳体、螺丝刀杆、驱动齿盘、驱动电机及弹簧,所述螺丝刀杆远离刀头的一端外周面沿轴向设有传动键,所述驱动齿盘对应螺丝刀杆设置有通孔及键槽,该驱动齿盘与壳体旋转配合,所述驱动电机输出轴上设有主动齿轮,该主动齿轮与驱动齿盘啮合,驱动螺丝刀杆周转,所述螺丝刀杆通过传动齿盘伸入壳体内,所述弹簧设置于螺丝刀杆与壳体之间。
18.采用上述技术方案,螺丝常设于通孔内且螺帽卡于防落套与通孔之间,避免了拆卸时螺丝掉落,而无法自动组装的问题,一个零部件包作为一个容器整体,整拆整换,便于自动化运行。设置的拧螺丝机构,螺丝刀杆在接触螺丝后,即使升降平台还在靠近,也能通过弹簧的收缩进行轴向退让,避免螺丝刀杆顶翻无人机。而设置传动键、带键槽的传动齿盘,在便于螺丝刀杆轴向滑动的同时,提供周向旋转的动力。
19.本发明的进一步设置:所述装卸货凹槽于升降平台路径一侧设有连通零部件收纳室的窗口,该零部件收纳室包括若干个编号排列的柜体,所述归库装置包括搬运机械手,该搬运机械手与卸货装置均由控制芯片联动控制,所述搬运机械手穿过窗口从气动固定爪上接过零部件包存入对应柜体,或反之取出。
20.采用上述技术方案,通过搬运机械手识别控制指令,对应存入或取出所需柜体内的零部件包。窗口可做电控门,防水防异物。或整个中转站做电控顶棚,配合无人机开启或关闭,对中转站进行保护。
21.本发明的进一步设置:所述降落终点处设有固定机械手,该固定机械手夹持无人机保持位置固定。
22.采用上述技术方案,固定无人机,便于数据线机械手插入、卸货装置对接。
附图说明
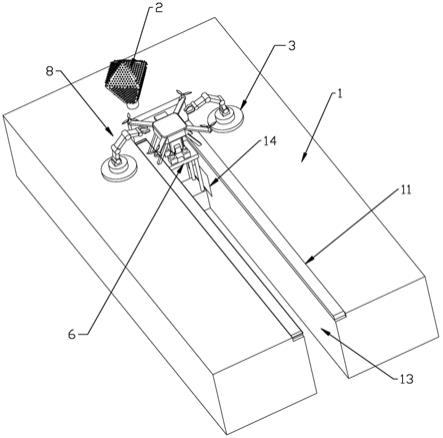
23.图1为本发明实施例的结构图1;图2为本发明实施例的引导柱结构图1;图3为本发明实施例的引导柱结构图2;图4为本发明实施例的引导柱结构图3;图5为本发明实施例的结构图2;图6为本发明实施例的爆炸图1;图7为本发明实施例的零部件包连接结构图;图8为本发明实施例的拧螺丝机构结构图;图9为图3中a处局部发大图。
24.其中,1-起降平台、11-降落传送带、12-零部件收纳室、13-装卸货凹槽、14-窗口、15-柜体、2-引导柱、21-上棱锥部、22-下棱锥部、23-小棱锥体、231-升面、232-降面、233-左面、234-右面、3-数据线机械手、4-无人机、41-零部件包、411-连接座、412-防落套、42-螺丝、5-卸货装置、51-升降平台、52-升降气缸、53-气动固定爪、56-归库装置、7-拧螺丝机构、71-螺丝刀杆、72-驱动齿盘、73-驱动电机、74-弹簧、75-传动键、76-主动齿轮、8-固定机械
手。
具体实施方式
25.如图1-9所示,一种电网自动巡检无人机4目标挂点校准中转站,该中转站包括起降平台1、控制芯片、通信模块、太阳能蓄电模块及无人机4无线充电模块,所述起降平台1 设有引导柱2及数据线机械手3,该引导柱2包括沿水平面对称设置的上棱锥部21和下棱锥部22,该上棱锥部21和下棱锥部22的表面均设置有若干个小棱锥体23,所述小棱锥体 23相对位于竖直上方的面为升面231,相对位于竖直下方的面为降面232,所述引导柱2上的各个升面231和降面232,依照与起降平台表面之间的倾斜度不同,设置不同色彩,对应角度变化依次形成色彩组合列表,无人机4于起降平台1降落时,与起降平台1之间的高度变化,拍摄引导柱2角度随之变化,如附图3所示状态,无人机4根据各升面231降面232 的色彩变化信息,对照色彩组合列表,确定并修正自身与起降平台1的位置关系;所述数据线机械手3于无人机4降落后插入无人机4数据接口,以起降平台1固定坐标校准无人机4 自身坐标偏差。
26.通信模块用于远程数据、信号传输,便于工作人员远程控制。太阳能蓄电模块通过光伏板转换并储存电能,为各设备及无人机4供电,控制芯片控制各装置启停动作。数据线机械手3,即是在常规机械手机器人的爪部,设置数据接口,用于传输数据。无人机4无线充电模块,为无人机4补充电能,对应设置于降落终点处,便于衔接操作。均为现有技术不做详述。
27.所述上棱锥部21和下棱锥部22相邻面之间的夹角小于90
°
。
28.本发明的引导柱2,通过沿水平面对称设置的上棱锥部21和下棱锥部22分隔为两个部分,在无人机4高度变化时,所能拍摄的画面,随各升面231、降面232的设置角度差异,会逐渐变化,根据角度预设在各升面231、降面232上不同的色彩组合,形成不同色彩组合的固定信息,如同二维码一般,无人机4只需要通过摄像头识别当前色彩组合的图像,比对已有的角度表,便能识别出自身相对升降平台51的高度位置关系。即使gps信号闪断,无人机4坐标偏移,也能根据识别比对现场图像,程序自动引导降落。确保了无人机4 降落时的安全。
29.所述起降平台1上设有降落终点、降落传送带11及位置传感器,该降落传送带11衔接至降落终点,且设有特定色彩,所述数据线机械手3、引导柱2设置于降落终点处,所述小棱锥体23相对升面231降面232还包括左面233、右面234,所述引导柱2上的各个左面 233和右面234,依照与降落传送带11之间的角度不同,设置不同色彩,无人机4于起降平台1降落时,无人机4根据所拍摄各升面231降面232的色彩变化信息(如附图4所示)、及识别终点传送带色彩轮廓信息,确定并修正自身与终点传送带的位置关系为确保无人机4降落位置为最终进行校准坐标和更换负载的位置,即形成一个统一的降落终点,所以通过各左面233、右面234的色彩信息辅助无人机4位置与降落所述的对齐降落,然后由传送带送至降落终点停止。位置传感器沿传送带设置,检测到无人机4降落,或来到降落终点,便由控制芯片控制传送带启停。
30.所述无人机4底部可拆卸的设置有零部件包41,所述起降平台1内部设有零部件收纳室12,所述中转站还包括设置于降落终点处的卸货装置5及归库装置6,所述卸货装置5 将零部件包41由无人机4上卸下或装上,所述归库装置6衔接卸货装置5,将零部件包41 存
入或取出于零部件收纳室12。
31.无人机4可拆卸的负载零部件包41,便可以在巡线过程中,根据需要,调配、运输、储存零部件于各中转站,避免了维护人员跋涉而至,缺少某零部件的情况。
32.所述起降平台1上设有衔接终点的装卸货凹槽13,所述终点传送带位于装卸货凹槽 13两侧,无人机4支撑脚分别位于两侧终点传送带上,零部件包41位于装卸货凹槽13正上方;所述零部件包41包括收容腔及位于腔口处的连接座411,该连接座411与无人机4底部螺丝42连接;所述卸货装置5位于装卸货凹槽13内终点处,包括升降平台51、升降气缸52、气动固定爪 53、及对应零部件包41螺丝42位置设置的拧螺丝机构7,所述气动固定座朝向零部件包41 底面的端部设有接触开关,该接触开关控制气动固定座夹住零部件包41;所述拧螺丝机构7 拆卸螺丝42。
33.设置的装卸货凹槽13结构,使无人机4携带高度大于支撑架高度的零部件包41 时,也能平稳降落。卸货机构,对零部件包41进行拆卸并夹取。接触开关识别起点固定爪是否接触零部件包41。
34.所述连接座411对应螺丝42设有通孔,对应螺丝42螺帽处设有防落套412,该螺丝42常设于通孔内且螺帽卡于防落套412与通孔之间;所述扭螺丝42机构包括壳体、螺丝刀杆71、驱动齿盘72、驱动电机73及弹簧74,所述螺丝刀杆71远离刀头的一端外周面沿轴向设有传动键75,所述驱动齿盘72对应螺丝刀杆71设置有通孔及键槽,该驱动齿盘72与壳体旋转配合,所述驱动电机73输出轴上设有主动齿轮76,该主动齿轮76与驱动齿盘72 啮合,驱动螺丝刀杆71周转,所述螺丝刀杆71通过传动齿盘伸入壳体内,所述弹簧74设置于螺丝刀杆71与壳体之间。
35.螺丝42常设于通孔内且螺帽卡于防落套412与通孔之间,避免了拆卸时螺丝42掉落,防落套横截面呈u型,挡住螺丝两侧及螺帽的边缘,中间留有孔供螺丝刀杆进入,限制了螺丝的轴向活动范围,却不影响螺丝旋转。而无法自动组装的问题,一个零部件包41 作为一个容器整体,整拆整换,便于自动化运行。设置的拧螺丝机构7,螺丝刀杆71在接触螺丝42后,即使升降平台51还在靠近,也能通过弹簧74的收缩进行轴向退让,避免螺丝刀杆71顶翻无人机4。而设置传动键75、带键槽的传动齿盘,在便于螺丝刀杆71轴向滑动的同时,提供周向旋转的动力。
36.所述装卸货凹槽13于升降平台51路径一侧设有连通零部件收纳室12的窗口14,该零部件收纳室12包括若干个编号排列的柜体15,所述归库装置6包括搬运机械手,该搬运机械手与卸货装置5均由控制芯片联动控制,所述搬运机械手穿过窗口14从气动固定爪53 上接过零部件包41存入对应柜体15,或反之取出。
37.通过搬运机械手识别控制指令,对应存入或取出所需柜体15内的零部件包41。窗口 14可做电控门,防水防异物。或整个中转站做电控顶棚,配合无人机4开启或关闭,对中转站进行保护。
38.所述降落终点处设有固定机械手8,该固定机械手8夹持无人机4保持位置固定。
39.固定无人机4,便于数据线机械手3插入、卸货装置5对接。