1.本实用新型涉及无人机技术领域,具体是一种应对复杂环境的起落架及无人机。
背景技术:
2.无人驾驶飞机,俗称:无人飞机、无人机、无人航空载具、无人作战飞机以及蜂型机,广义上为不需要驾驶员登机驾驶的各式遥控飞行器。
3.现有技术中的无人机设置的起落架通常位置固定,不能进行长度调整。因此,在一些特殊恶劣的降落环境下如坡面,坑坑洼洼的凹槽,则不能实现较好的平稳降落。
4.针对上述背景技术中的问题,本实用新型旨在提供一种应对复杂环境的起落架。
技术实现要素:
5.本实用新型的目的在于提供一种应对复杂环境的起落架,以解决上述背景技术中提出的问题。
6.为实现上述目的,本实用新型提供如下技术方案:
7.一种应对复杂环境的起落架,其包括:电动伸缩杆、固定环以及脚垫,所述脚垫安装固定在固定环中间内部,固定环上端与电动伸缩杆连接固定。
8.一种安装有上述应对复杂环境的起落架的无人机,其包括:无人机本体,所述无人机本体内部设有控制电路板、蓄电池以及水平传感器,蓄电池以及水平传感器均与控制电路板连接;所述无人机本体下端设有应对复杂环境的起落架,无人机本体边沿四周安装有起飞组件。
9.作为本实用新型进一步的方案:所述应对复杂环境的起落架的数量为四个,四个应对复杂环境的起落架设置在无人机本体下端四周;所述起飞组件的数量为八个,八个起飞组件分布在无人机本体边沿四周;所述起飞组件包括尾管、电机以及旋翼,旋翼设置在电机的输出轴上,电机安装固定在尾管末端,尾管前端安装固定在无人机本体上。
10.与现有技术相比,本实用新型的有益效果是:
11.安装有应对复杂环境的起落架的无人机通过设置的起飞组件实现起飞,通过安装的水平传感器判断无人机降落时的降落状态,进而通过设置的应对复杂环境的起落架进行调整,以适应无人机的正常降落。
附图说明
12.为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例。
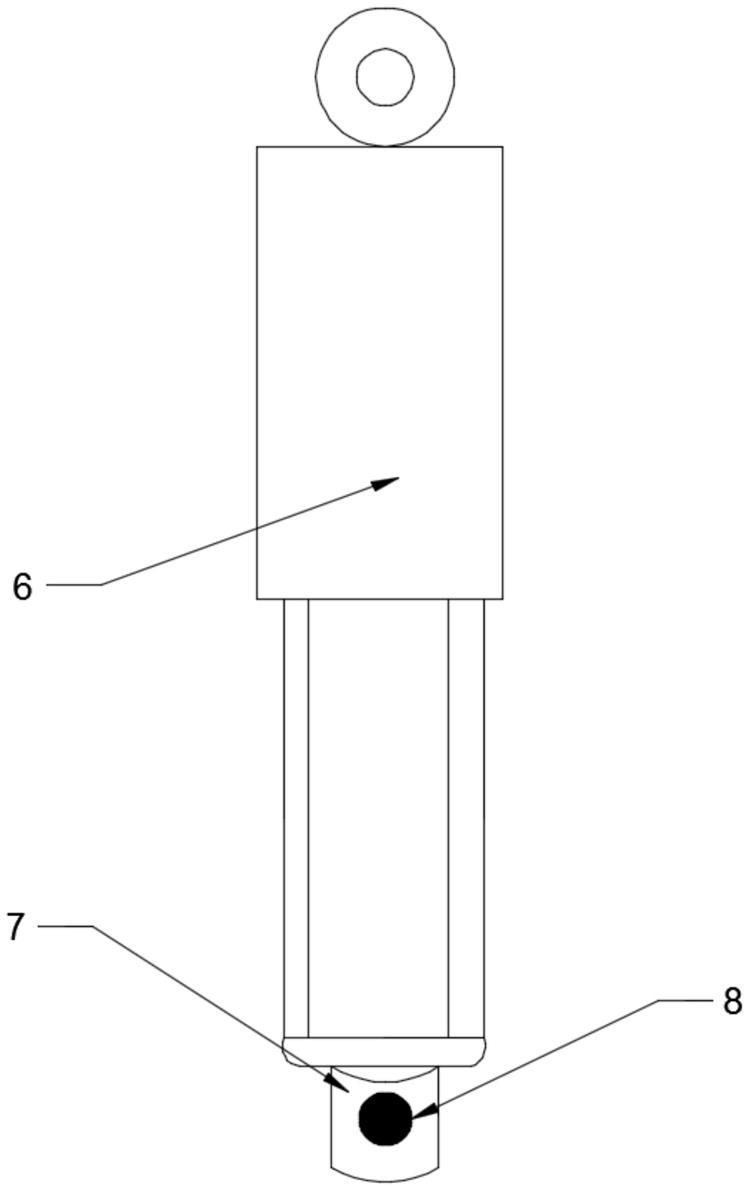
13.图1为本实用新型实施例的一种应对复杂环境的起落架的结构示意图。
14.图2为安装有应对复杂环境的起落架的无人机的结构示意图。
15.图中:1-旋翼、2-电机、3-尾管、4-无人机本体、5-水平传感器、6-电动伸缩杆、7-固
定环、8-脚垫。
具体实施方式
16.为了使本实用新型所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
17.实施例1
18.请参阅图1,本实用新型实施例1中提供的一种应对复杂环境的起落架,其包括:电动伸缩杆6、固定环7以及脚垫8,所述脚垫8安装固定在固定环7中间内部,固定环7上端与电动伸缩杆6连接固定;
19.使用所述应对复杂环境的起落架时,通过启动电动伸缩杆6改变固定环7内部安装固定的脚垫8的上下高度,以便使安装有所述应对复杂环境的起落架的飞行设备适应不同恶劣环境的降落。
20.实施例2
21.请参阅图2,本实用新型实施例2中提供的一种安装有上述应对复杂环境的起落架的无人机,其包括:无人机本体4,所述无人机本体4内部设有控制电路板、蓄电池以及水平传感器5,蓄电池以及水平传感器5均与控制电路板连接;
22.所述无人机本体4下端设有应对复杂环境的起落架,无人机本体4边沿四周安装有起飞组件;
23.无人机通过设置的起飞组件实现起飞,通过安装的水平传感器5判断无人机降落时的降落状态,进而通过设置的应对复杂环境的起落架进行调整,以适应无人机的正常降落。
24.进一步地,所述应对复杂环境的起落架的数量为四个,四个应对复杂环境的起落架设置在无人机本体4下端四周;所述起飞组件的数量为八个,八个起飞组件分布在无人机本体4边沿四周;所述起飞组件包括尾管3、电机2以及旋翼1,旋翼1设置在电机2的输出轴上,电机2安装固定在尾管3末端,尾管3前端安装固定在无人机本体4上;
25.启动电机2,电机2带动旋翼1高速运转,产生升力,使所述安装有上述应对复杂环境的起落架的无人机实现起飞与降落;
26.实施例2的其余结构部分与实施例1相同。
27.本实用新型实施例的工作原理是:
28.所述的安装有应对复杂环境的起落架的无人机在降落时,例如,降落在斜坡表面上,例如,无人机刚落地时,无人机的后两个应对复杂环境的起落架撑住斜坡面,因为此时无人机还是处于半降落的过程中,还没有完全降落,此时随着起飞组件的逐步关停中,无人机机身逐渐下歪,发生倾斜,此时无人机的前两个应对复杂环境的起落架就会伸长撑住地面,然后根据设置的水平传感器5调节长度,例如,机身倾斜了一度,前两个应对复杂环境的起落架伸长一个阶段。
29.在本实用新型的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元
件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
30.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种应对复杂环境的起落架,其特征在于包括:电动伸缩杆(6)、固定环(7)以及脚垫(8),所述脚垫(8)安装固定在固定环(7)中间内部,固定环(7)上端与电动伸缩杆(6)连接固定。2.一种包括如权利要求1所述的应对复杂环境的起落架的无人机,其包括:无人机本体(4);其特征在于:所述无人机本体(4)内部设有控制电路板、蓄电池以及水平传感器(5),蓄电池以及水平传感器(5)均与控制电路板连接;所述无人机本体(4)下端设有应对复杂环境的起落架,无人机本体(4)边沿四周安装有起飞组件;所述应对复杂环境的起落架的数量为四个,四个应对复杂环境的起落架设置在无人机本体(4)下端四周;所述起飞组件的数量为八个,八个起飞组件分布在无人机本体(4)边沿四周;所述起飞组件包括尾管(3)、电机(2)以及旋翼(1),旋翼(1)设置在电机(2)的输出轴上,电机(2)安装固定在尾管(3)末端,尾管(3)前端安装固定在无人机本体(4)上。
技术总结
本实用新型涉及无人机技术领域,具体是一种应对复杂环境的起落架及无人机;所述应对复杂环境的起落架包括电动伸缩杆、固定环以及脚垫;所述脚垫安装固定在固定环中间内部,固定环上端与电动伸缩杆连接固定;所述无人机包括无人机本体,无人机本体内部设有控制电路板、蓄电池以及水平传感器,蓄电池以及水平传感器均与控制电路板连接;所述无人机本体下端设有应对复杂环境的起落架,无人机本体边沿四周安装有起飞组件;安装有应对复杂环境的起落架的无人机通过设置的起飞组件实现起飞,通过安装的水平传感器判断无人机降落时的降落状态,进而通过设置的应对复杂环境的起落架进行调整,以适应无人机的正常降落。以适应无人机的正常降落。以适应无人机的正常降落。
技术研发人员:骆鹏
受保护的技术使用者:安徽飞翼航空科技有限公司
技术研发日:2020.11.16
技术公布日:2022/1/18