1.本发明属于飞行器主动流动控制技术领域,涉及一种基于主动流动控制的高速飞行器减阻闭环控制方法。
背景技术:
2.高速飞行器技术是21世纪航空航天技术领域新的制高点,是人类航空航天史上继发明飞机、突破音障飞行之后的第三个划时代里程碑,同时也将开辟人类进入太空的新方式。高速飞行器具有飞行距离远、机动能力强、突防概率高的特点,然而要实现上述目的,高速飞行器需要在大气层内长时间保持高速飞行,苛刻的高升阻比需求和严酷的气动热环境使得传统高速飞行器总体设计技术和热防护技术都面临着严峻的挑战。新型减阻技术的引入能够有效化解高升阻比设计与热防护系统承受能力之间的矛盾,是国内外高速飞行器技术发展的核心问题之一。
3.对于高速飞行器的巡航段而言,降低阻力对于航程的增益是十分显著的;其次,对于作战应用的高速飞行器,降低飞行器阻力可有效提高飞行器机动性。在传统基于外形优化高升阻比设计技术已经接近极限的情况下,高速飞行器航程提升对于减阻新技术的引入需求是非常明确和迫切的。高速飞行器在大气层内飞行,其阻力主要由摩擦阻力和压差阻力组成,对于超声速飞行器,波阻是压差阻力的主要来源。激波是飞行器在大气中超声速飞行固有的特征,是一种非定常流动现象,其产生的波阻对飞行性能影响很大,激波越强,波阻越大。随着飞行马赫数的增加,阻力增大,波阻占飞行器阻力的比例增大,尤其是对于在稠密大气层飞行的高速飞行器,波阻占阻力的一半以上。如果能够探索一种激波控制技术,减弱激波强度甚至消除激波,将可很大程度降低波阻,大幅度降低高速飞行器的飞行阻力,实现高速飞行器航程的大幅度提高。
技术实现要素:
4.本发明解决的技术问题是:克服现有技术的不足,提出一种基于主动流动控制的高速飞行器减阻闭环控制方法,将主动流动控制和飞行参数实时采集相结合的高速飞行器减阻闭环控制方法,为提升飞行器整体性能提供了新的技术手段。
5.本发明解决技术的方案是:
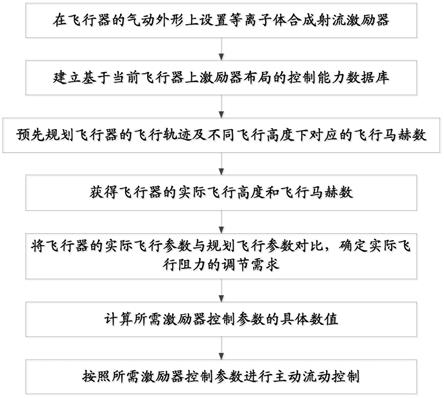
6.一种基于主动流动控制的高速飞行器减阻闭环控制方法,包括如下步骤:
7.步骤一、在飞行器的气动外形上设置等离子体合成射流激励器,通过等离子体合成射流控制激波实现高速飞行减阻;
8.步骤二、采用仿真手段,建立基于当前飞行器上激励器布局的控制能力数据库,数据库参数包括飞行高度、飞行马赫数、激励器控制参数和飞行阻力;
9.步骤三、预先规划飞行器的飞行轨迹,并规划在该飞行轨迹中不同飞行高度下对应的飞行马赫数;
10.步骤四、执行飞行器飞行任务;飞行器上设置有传感器,通过传感器获得飞行器的
实际飞行高度和飞行马赫数;
11.步骤五、将飞行器的实际飞行高度和飞行马赫数与规划的飞行高度和飞行马赫数进行对比,根据对比结果确定实际飞行阻力的调节需求;
12.步骤六、通过实际飞行阻力的调节需求计算所需激励器控制参数的具体数值;
13.步骤七、等离子体合成射流激励器按照所需激励器控制参数进行主动流动控制;
14.步骤八、重复步骤四至步骤七,实现闭环反馈的飞行器减阻主动流动控制,直至飞行任务结束。
15.在上述的一种基于主动流动控制的高速飞行器减阻闭环控制方法,所述步骤一中,在飞行器头部最前端设置等离子体合成射流激励器。
16.在上述的一种基于主动流动控制的高速飞行器减阻闭环控制方法,所述步骤二中,控制能力数据库为在不同飞行高度、不同飞行马赫数下,改变激励器控制参数产生的飞行阻力变化数据。
17.在上述的一种基于主动流动控制的高速飞行器减阻闭环控制方法,数据库具体为:
18.当飞行高度为25km,飞行马赫数为5,激励器控制参数为0时,飞行阻力为25264n;
19.当飞行高度为25km,飞行马赫数为5,激励器控制参数为1时,飞行阻力为24457n;
20.当飞行高度为25km,飞行马赫数为5,激励器控制参数为2时,飞行阻力为22576n;
21.当飞行高度为25km,飞行马赫数为7,激励器控制参数为0时,飞行阻力为31200n;
22.当飞行高度为25km,飞行马赫数为7,激励器控制参数为1时,飞行阻力为29856n;
23.当飞行高度为25km,飞行马赫数为7,激励器控制参数为2时,飞行阻力为26720n;
24.当飞行高度为30km,飞行马赫数为5,激励器控制参数为0时,飞行阻力为11863n;
25.当飞行高度为30km,飞行马赫数为5,激励器控制参数为1时,飞行阻力为11484n;
26.当飞行高度为30km,飞行马赫数为5,激励器控制参数为2时,飞行阻力为10601n;
27.当飞行高度为30km,飞行马赫数为7,激励器控制参数为0时,飞行阻力为14650n;
28.当飞行高度为30km,飞行马赫数为7,激励器控制参数为1时,飞行阻力为14019n;
29.当飞行高度为30km,飞行马赫数为7,激励器控制参数为2时,飞行阻力为12547n;
30.其中,当激励器控制参数为0时,表示激励器不工作;当激励器控制参数为2时,表示激励器控制能力最强;当激励器控制参数为1时,表示激励器控制能力为最强控制力的一半。
31.在上述的一种基于主动流动控制的高速飞行器减阻闭环控制方法,所述步骤五中,实际飞行阻力的调节需求确定方法为:
32.当实际飞行高度与规划飞行高度同高度,且实际飞行马赫数小于规划飞行马赫数时,则需要减小飞行阻力,提高实际飞行马赫数至与规划飞行马赫数相同;
33.当实际飞行高度与规划飞行高度同高度,且实际飞行马赫数大于规划飞行马赫数时,则需要增大飞行阻力,减小实际飞行马赫数至与规划飞行马赫数相同;
34.当实际飞行高度与规划飞行高度同高度,且实际飞行马赫数等于规划飞行马赫数时,飞行阻力不变。
35.在上述的一种基于主动流动控制的高速飞行器减阻闭环控制方法,所述步骤六中,所需激励器控制参数的具体数值的计算方法为:
36.将实际飞行高度、实际飞行马赫数、实际飞行阻力的调节需求代入数据库中,通过线性插值法,反推出激励器控制参数的数值。
37.本发明与现有技术相比的有益效果是:
38.(1)传统的基于外形优化减阻的设计技术已经接近极限,利用主动流动控制方法实现高速飞行器减阻可进一步拓展高速飞行器的设计空间,且可根据需要在飞行过程中方便的实施控制;
39.(2)本发明中等离子体合成射流兼具合成射流激励器的零质量通量特性和等离子体激励器的高频、快响应特性,同时克服了压电式合成射流、介质阻挡放电激励器诱导射流速度偏低的不足,是具有较好应用前景的主动流动控制技术手段;
40.(3)本发明通过将传感器实时采集信息引入控制回路,实现闭环反馈的减阻控制过程,可大大提高主动流动控制效能。
附图说明
41.图1为本发明高速飞行器减阻闭环控制流程图;
42.图2为本发明等离子体合成射流激励器安装示意图。
具体实施方式
43.下面结合实施例对本发明作进一步阐述。
44.本发明提出了一种将主动流动控制和飞行参数实时采集相结合的高速飞行器减阻闭环控制方法,为提升飞行器整体性能提供了新的技术手段。
45.高速飞行器减阻闭环控制方法,如图1所示,具体包括如下步骤:
46.步骤一、根据高速飞行器气动外形,在飞行器头部最前端设置等离子体合成射流激励器。通过等离子体合成射流控制激波实现高速飞行减阻。
47.步骤二、采用仿真手段,建立基于当前飞行器上激励器布局的控制能力数据库,数据库参数包括飞行高度、飞行马赫数、激励器控制参数和飞行阻力;控制能力数据库为在不同飞行高度、不同飞行马赫数下,改变激励器控制参数产生的飞行阻力变化数据。
48.数据库具体为:
49.当飞行高度为25km,飞行马赫数为5,激励器控制参数为0时,飞行阻力为25264n;
50.当飞行高度为25km,飞行马赫数为5,激励器控制参数为1时,飞行阻力为24457n;
51.当飞行高度为25km,飞行马赫数为5,激励器控制参数为2时,飞行阻力为22576n;
52.当飞行高度为25km,飞行马赫数为7,激励器控制参数为0时,飞行阻力为31200n;
53.当飞行高度为25km,飞行马赫数为7,激励器控制参数为1时,飞行阻力为29856n;
54.当飞行高度为25km,飞行马赫数为7,激励器控制参数为2时,飞行阻力为26720n;
55.当飞行高度为30km,飞行马赫数为5,激励器控制参数为0时,飞行阻力为11863n;
56.当飞行高度为30km,飞行马赫数为5,激励器控制参数为1时,飞行阻力为11484n;
57.当飞行高度为30km,飞行马赫数为5,激励器控制参数为2时,飞行阻力为10601n;
58.当飞行高度为30km,飞行马赫数为7,激励器控制参数为0时,飞行阻力为14650n;
59.当飞行高度为30km,飞行马赫数为7,激励器控制参数为1时,飞行阻力为14019n;
60.当飞行高度为30km,飞行马赫数为7,激励器控制参数为2时,飞行阻力为12547n;
61.其中,当激励器控制参数为0时,表示激励器不工作;当激励器控制参数为2时,表示激励器控制能力最强;当激励器控制参数为1时,表示激励器控制能力为最强控制力的一半,具体见表1。
62.表1
[0063][0064][0065]
步骤三、预先规划飞行器的飞行轨迹,并规划在该飞行轨迹中不同飞行高度下对应的飞行马赫数。
[0066]
在传统飞行器设计的基础上,综合考虑激励器控制能力数据库,将主动流动控制作为一种控制力产生手段,加入控制策略和控制律设计。
[0067]
步骤四、执行飞行器飞行任务;飞行器上设置有传感器,通过传感器获得飞行器的实际飞行高度和飞行马赫数。
[0068]
步骤五、将飞行器的实际飞行高度和飞行马赫数与规划的飞行高度和飞行马赫数进行对比,根据对比结果确定实际飞行阻力的调节需求;实际飞行阻力的调节需求确定方法为:
[0069]
当实际飞行高度与规划飞行高度同高度,且实际飞行马赫数小于规划飞行马赫数时,则需要减小飞行阻力,提高实际飞行马赫数至与规划飞行马赫数相同;
[0070]
当实际飞行高度与规划飞行高度同高度,且实际飞行马赫数大于规划飞行马赫数时,则需要增大飞行阻力,减小实际飞行马赫数至与规划飞行马赫数相同;
[0071]
当实际飞行高度与规划飞行高度同高度,且实际飞行马赫数等于规划飞行马赫数时,飞行阻力不变。
[0072]
步骤六、通过实际飞行阻力的调节需求计算所需激励器控制参数的具体数值;所需激励器控制参数的具体数值的计算方法为:将实际飞行高度、实际飞行马赫数、实际飞行阻力的调节需求代入数据库中,通过线性插值法,反推出激励器控制参数的数值。
[0073]
步骤七、等离子体合成射流激励器按照所需激励器控制参数进行主动流动控制。
[0074]
步骤八、重复步骤四至步骤七,实现闭环反馈的飞行器减阻主动流动控制,直至飞行任务结束。
[0075]
本发明利用等离子体合成射流激励器进行减阻,结合飞行器布局特点设计合理的激励器布局方案,使飞行器具备阻力调节手段;在飞行器关键位置安装压力传感器,飞行过程中实时采集飞行器表面压力,结合其他飞行参数和飞行任务,解算当前的减阻情况及对阻力调节的需求;应用控制策略,将阻力调节需求分解为等离子体激励器控制参数,并实施控制,实现飞行器闭环减阻。
[0076]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。