1.本发明涉及无人机航测技术领域,特别涉及基于航测的平衡式智能化拍摄组件。
背景技术:
2.目前无人机在进行航拍时,通常直接将摄影机固定在无人机上,以保持摄影机稳定。
3.然而,在航测时,由于高空气流不稳定,使得在航测过程中需要时常进行水平调整,以便于保持机身飞行稳定和拍摄稳定,然后机身稳定通常只能够通过旋翼进行调整,使得调整时间较长,影响拍摄效率。
技术实现要素:
4.有鉴于此,本发明提供基于航测的平衡式智能化拍摄组件,其具有内电磁环、外电磁环和微型电动伸缩杆,实现智能快速调整的目的,最短的时间保证机身稳定,以便于为摄像提供更好拍摄效果。
5.本发明提供了基于航测的平衡式智能化拍摄组件,具体包括:安装座;所述安装座的中部竖向安装有第一旋转电机;所述第一旋转电机的外壳下端固定环套有撑杆套架;所述撑杆套架的外部环套有平衡环;所述撑杆套架与平衡环之间环状分布设有十二个伸缩杆组,伸缩杆组由外电磁环、内电磁环、微型电动伸缩杆和平衡磁环共同组成;所述平衡环上环形分布设有保护板;所述第一旋转电机的转轴下端转动连接有竖向吊架;所述竖向吊架的下端又竖向转动安装有水平吊架;所述水平吊架的末端转动安装有摄像机。
6.可选地,所述安装座整体呈沙漏状结构,安装座的内侧壁上安装有控制器。
7.可选地,所述撑杆套架为正十二面柱状结构,撑杆套架的柱面中部分别垂直向外固定连接有撑杆,撑杆的外端与平衡环的内端侧壁固定相连接,伸缩杆组则滑动套接在撑杆上。
8.可选地,所述平衡环为上下两部分构成,平衡环下半部分的外壁内凹,保护板则内藏在平衡环的下半部分上,平衡环的上端环形分布有六个水平传感器,所述外电磁环的下端为半圆状凸起,其凸起内腔中填充有铅块,外电磁环的下端与微型电动伸缩杆的外端固定相连接,外电磁环的上端与撑杆滑动相连接,所述内电磁环的下端与微型电动伸缩杆的内端固定相连接,内电磁环的上端与撑杆滑动相连接。
9.可选地,所述微型电动伸缩杆的伸缩杆的内端固定连接在撑杆套架柱面上,微型电动伸缩杆上环套有至少八个平衡磁环,平衡磁环为铁质材料制成,所述保护板的内凹面中部垂直设有挤压杆,挤压杆滑动插接在平衡环中;所述挤压杆的内端设有挡盘,挡盘内侧的挤压杆上套装有挤压弹簧;所述挤压杆左右两侧的保护板上设有导向杆,所述竖向吊架为类l状结构,竖向吊架的下端设有第二旋转电机,所述水平吊架的末端设有第三旋转电机,第三旋转电机的转轴与摄像机固定相连接。
10.有益效果
11.1、本发明中当水平传感器触发后,将信号对应传输至控制器,控制控制倾斜两端部分的外电磁环、内电磁环和微型电动伸缩杆部分进行工作,以便于达到快速调整至水平状态的目的,从而保证摄像的稳定性。
12.2、本发明中正常水平状态下,内电磁环工作,将平衡磁环吸附,而发生倾斜时,翻下一端的内电磁环工作,将平衡磁环吸附,同时微型电动伸缩杆内移,使得重心内移,而翘起一端的外电磁环工作,将平衡磁环吸附,同时微型电动伸缩杆外移,使得重心外移,从而快速达到平衡机身的目的,与水平传感器相配合,实现智能快速调整的目的,最短的时间保证机身稳定,以便于为摄像提供更好拍摄效果。
13.3、本发明中竖向吊架为类l状结构,竖向吊架的下端设有第二旋转电机,水平吊架的末端设有第三旋转电机,第三旋转电机的转轴与摄像机固定相连接,可配合水平传感器和微型电动伸缩杆实现快速稳定,以便于实现智能快速的调整效果。
14.4、本发明中当微型电动伸缩杆外移,压迫到挤压杆时,挤压杆外移,使得保护板弹出,一方面可辅助使得重心外移,另一方面,可在因重心调整过猛而发生坠机时,弹出的保护板能够起到一定的缓冲和保护作用,降低损失。
附图说明
15.为了更清楚地说明本发明的实施例的技术方案,下面将对实施例的附图作简单地介绍。
16.下面描述中的附图仅仅涉及本发明的一些实施例,而非对本发明的限制。
17.在附图中:
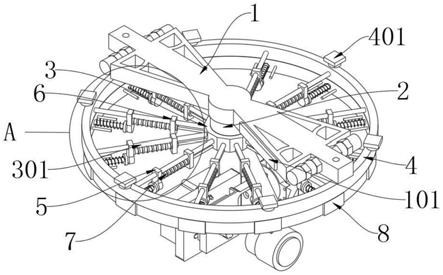
18.图1示出了根据本发明的实施例的右前上方轴视结构示意图;
19.图2示出了根据本发明的实施例的图1中a放大部分结构示意图;
20.图3示出了根据本发明的实施例的右前下方轴视结构示意图;
21.图4示出了根据本发明的实施例的竖向吊架和安装座部分相分离状态轴视结构示意图;
22.图5示出了根据本发明的实施例的竖向吊架部分移除状态轴视结构示意图;
23.图6示出了根据本发明的实施例的保护板部分下移状态轴视结构示意图;
24.图7示出了根据本发明的实施例的微型电动伸缩杆部分轴视结构示意图;
25.图8示出了根据本发明的实施例的系统结构框图。
26.附图标记列表
27.1、安装座;101、控制器;
28.2、第一旋转电机;
29.3、撑杆套架;301、撑杆;
30.4、平衡环;401、水平传感器;
31.5、外电磁环;
32.6、内电磁环;
33.7、微型电动伸缩杆;701、平衡磁环;
34.8、保护板;801、挤压杆;802、挤压弹簧;803、导向杆;
35.9、竖向吊架;901、第二旋转电机;
36.10、水平吊架;1001、第三旋转电机;
37.11、摄像机。
具体实施方式
38.为了使得本发明的技术方案的目的、方案和优点更加清楚,下文中将结合本发明的具体实施例的附图,对本发明实施例的技术方案进行清楚、完整的描述。除非另有说明,否则本文所使用的术语具有本领域通常的含义。附图中相同的附图标记代表相同的部件。
39.实施例:请参考图1至图8:
40.本发明提出了基于航测的平衡式智能化拍摄组件,包括:安装座1;安装座1的中部竖向安装有第一旋转电机2;第一旋转电机2的外壳下端固定环套有撑杆套架3;撑杆套架3的外部环套有平衡环4;撑杆套架3与平衡环4之间环状分布设有十二个伸缩杆组,伸缩杆组由外电磁环5、内电磁环6、微型电动伸缩杆7和平衡磁环701共同组成;平衡环4上环形分布设有保护板8;第一旋转电机2的转轴下端转动连接有竖向吊架9;竖向吊架9的下端又竖向转动安装有水平吊架10;水平吊架10的末端转动安装有摄像机11,安装座1整体呈沙漏状结构,安装座1的内侧壁上安装有控制器101,通过控制器101将各部分进行调配使用。
41.此外,根据本发明的实施例,撑杆套架3为正十二面柱状结构,撑杆套架3的柱面中部分别垂直向外固定连接有撑杆301,撑杆301的外端与平衡环4的内端侧壁固定相连接,伸缩杆组则滑动套接在撑杆301上,可通过微型电动伸缩杆7和外电磁环5部分在撑杆套架3上进行位置调整,以便于实现角度的平衡调整,达到快速稳定机身的目的。
42.此外,根据本发明的实施例,如图1所示,平衡环4为上下两部分构成,平衡环4下半部分的外壁内凹,保护板8则内藏在平衡环4的下半部分上,平衡环4的上端环形分布有六个水平传感器401,当水平传感器401触发后,将信号对应传输至控制器101,控制控制倾斜两端部分的外电磁环5、内电磁环6和微型电动伸缩杆7部分进行工作,以便于达到快速调整至水平状态的目的,从而保证摄像的稳定性。
43.此外,根据本发明的实施例,如图1所示,外电磁环5的下端为半圆状凸起,其凸起内腔中填充有铅块,外电磁环5的下端与微型电动伸缩杆7的外端固定相连接,外电磁环5的上端与撑杆301滑动相连接,内电磁环6的下端与微型电动伸缩杆7的内端固定相连接,内电磁环6的上端与撑杆301滑动相连接,微型电动伸缩杆7的伸缩杆的内端固定连接在撑杆套架3柱面上,微型电动伸缩杆7上环套有至少八个平衡磁环701,平衡磁环701为铁质材料制成,正常水平状态下,内电磁环6工作,将平衡磁环701吸附,而发生倾斜时,翻下一端的内电磁环6工作,将平衡磁环701吸附,同时微型电动伸缩杆7内移,使得重心内移,而翘起一端的外电磁环5工作,将平衡磁环701吸附,同时微型电动伸缩杆7外移,使得重心外移,从而快速达到平衡机身的目的,与水平传感器401相配合,实现智能快速调整的目的,最短的时间保证机身稳定,以便于为摄像提供更好拍摄效果。
44.此外,根据本发明的实施例,如图1和图2所示,保护板8的内凹面中部垂直设有挤压杆801,挤压杆801滑动插接在平衡环4中;挤压杆801的内端设有挡盘,挡盘内侧的挤压杆801上套装有挤压弹簧802;挤压杆801左右两侧的保护板8上设有导向杆803,当微型电动伸缩杆7外移,压迫到挤压杆801时,挤压杆801外移,使得保护板8弹出,一方面可辅助使得重心外移,另一方面,可在因重心调整过猛而发生坠机时,弹出的保护板8能够起到一定的缓
冲和保护作用,降低损失。
45.此外,根据本发明的实施例,如图3和图4所示,竖向吊架9为类l状结构,竖向吊架9的下端设有第二旋转电机901,水平吊架10的末端设有第三旋转电机1001,第三旋转电机1001的转轴与摄像机11固定相连接,可配合水平传感器401和微型电动伸缩杆7实现快速稳定,以便于实现智能快速的调整效果。
46.本实施例的具体使用方式与作用:本发明在使用过程中,水平传感器401用于监测机身水平状态,当发生倾斜时,及时做出反应,辅助机身进行智能化调整,正常水平状态下,内电磁环6工作,将平衡磁环701吸附,而发生倾斜时,翻下一端的内电磁环6工作,将平衡磁环701吸附,同时微型电动伸缩杆7内移,使得重心内移,而翘起一端的外电磁环5工作,将平衡磁环701吸附,同时微型电动伸缩杆7外移,使得重心外移,从而快速达到平衡机身的目的,与水平传感器401相配合,实现智能快速调整的目的,最短的时间保证机身稳定,而当微型电动伸缩杆7外移,压迫到挤压杆801时,挤压杆801外移,使得保护板8弹出,一方面可辅助使得重心外移,另一方面,可在因重心调整过猛而发生坠机时,弹出的保护板8能够起到一定的缓冲和保护作用。
47.最后,需要说明的是,本发明在描述各个构件的位置及其之间的配合关系等时,通常会以一个/一对构件举例而言,然而本领域技术人员应该理解的是,这样的位置、配合关系等,同样适用于其他构件/其他成对的构件。
48.以上所述仅是本发明的示范性实施方式,而非用于限制本发明的保护范围,本发明的保护范围由所附的权利要求确定。