1.本发明属于样品采集的技术领域,具体涉及一种户外样品采集装置及其工作方法。
背景技术:
2.采集土壤样品是地理学科学研究中的一类必要工作,即采集地球表面的土壤样品,进行室内观察或者实验。土壤取样作为一项传统的农学、地学资料获取与收集手段,在土壤学、农学、地质学、草业科学等领域有着广泛的应用,是室内分析整理与实验的基础。在户外构造发育处,往往地貌地形极为发育,如造山运动产生的陡峭山脉、拉伸运动产生的巨大沟谷、挤压运动产生的复杂褶皱、大型褶皱演化产生的山和谷。在上述地形地貌复杂区域,表面风成黄土或者古土壤自然保存完好,人为干扰因素较少,蕴含着大量有价值的古环境、古气候信息。
3.在户外工作环境中,特别是在地貌地形复杂的山区往往会导致交通困难,甚至人员行走也非常困难,因此限制了科技工作者的到达,无法进行取样和观察,造成了资源浪费,限制了科学的研究。而现有的装备和技术往往较为简单,只能采集通行条件良好区域的土壤样品,给取样工作造成了很大的局限性。
技术实现要素:
4.为了解决上述问题,本发明提供一种户外样品采集装置,包括:无人机;所述无人机包括机身、设置在所述机身内部的动力元件、设置在所述机身下部的支架、设置在所述机身上部的飞行螺旋桨和反力螺旋桨,其中,所述飞行螺旋桨用于无人机升降,所述反力螺旋桨用于提供下降力;由所述无人机中的动力元件驱动的抓采系统;搭载于所述无人机机身下部,由所述反力螺旋桨提供下降力。
5.进一步,所述抓采系统包括第一抓斗第二抓斗、第一抓斗连杆、第二抓斗连杆、第一铰接件、第二铰接件、抓斗滑块、抓斗支架;所述第一抓斗设置有第一一连接杆和第一二连接杆;所述第二抓斗设置有第二一连接杆和第二二连接杆;所述抓斗滑块两端设置有铰接固定件;所述抓斗支架一端与无人机机身下部固定连接,另一端分别与第一抓斗的第一一连接杆、第二抓斗的第二一连接杆固定连接;抓斗滑块两端的铰接固定件分别与第一抓斗连杆、第二抓斗连杆铰接;第一铰接件一端与第一抓斗连杆铰接,另一端与第一抓斗的第一二连接杆固定连接;第二铰接件一端与第二抓斗连杆铰接,另一端与第二抓斗的第二二连接杆固定连接;抓斗滑块穿过抓斗支架进行滑动连接,带动第一抓斗连杆、第二抓斗连杆运动,带动第一抓斗第二抓斗作开合运动。
6.进一步,所述第一抓斗连杆、第二抓斗连杆内设置有压力传感器。
7.进一步,所述支架内部设置压力传感器。
8.进一步,所述支架为可独立伸缩支架。
9.进一步,所述无人机还包括飞行支撑臂和增压支撑臂;飞行支撑臂沿无人机机身
中轴线为中心均匀对称设置于机身侧面;飞行螺旋桨固定于飞行支撑臂上;增压支撑臂沿无人机机身中轴线为中心均匀对称设置于机身顶部;反力螺旋桨固定于增压支撑臂上。
10.进一步,所述增压支撑臂长度短于飞行支撑臂长度,增压支撑臂与飞行支撑臂依次错开排列。
11.进一步,所述装置还包括摄像系统,搭载于无人机机身底部。
12.本发明还提供一种户外样品采集装置的工作方法,包括以下步骤:s1.获取目的地信息,控制无人机飞至样品采集目的地上方;s2.当所述无人机到达目的地上方的预设距离后,发出降落信号,无人机接收降落信号后,调节飞行螺旋桨的转速,保持水平降落直至支架接触地面后;s3.根据各个支架中压力传感器传输的压力信号判断各个支架与地面的接触情况,当判断为接触不良时,伸缩支架,直至各个支架与地面接触良好;s4.控制无人机关停飞行螺旋桨;s5.发出采集信号,抓采系统接收采集信号后,控制抓斗滑块向下滑动,带动第一抓斗和第二抓斗张开;s6.开启反力螺旋桨,装置控制抓采系统开始掘土;s7.在掘进过程中,根据第一抓斗连杆和第二抓斗连杆中压力传感器实时传输压力信号判断第一抓斗和第二抓斗与地面的接触情况,当判断为接触不良时,调节反力螺旋桨转速来调节抓采压力,直至达到预设掘进深度,完成掘进;s8.抓采系统控制抓斗滑块向上滑动,带动第一抓斗和第二抓斗关闭,以获取土样;s9.发出采样完成信号,控制无人机关闭反力螺旋桨,开启飞行螺旋桨;s10.控制无人机飞回,带回采集的土样。
13.其中,所述步骤s1包括:通过远程遥控器的操控信号,控制所述无人机(100)运动;或者通过在所述装置内设置的定位系统接收的目的地位置坐标,控制所述无人机(100)运动到所述目的地。
14.本发明具有以下有益效果:1)本装置通过在无人机机身下部设置抓采系统,可以到达工作人员难以到达的危险地形区域进行泥土取样。
15.2)本装置的无人机机身上设置飞行螺旋桨与反力螺旋桨,飞行螺旋桨控制无人机飞行升降,反力螺旋桨为抓采系统取样提供下降力,这样在地形陡峭危险地带进行取样的过程中效果明显。
16.3)本装置操作采用自动化控制,减轻了工作强度。
附图说明
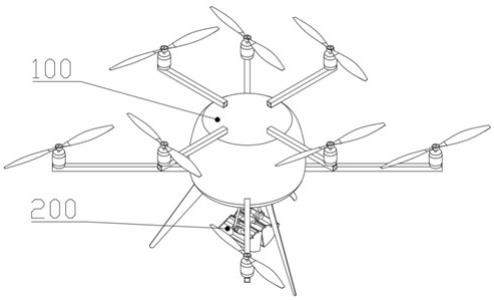
17.图1是根据本发明实施例的户外黄土自动采样装置的结构示意图。
18.图2是根据本发明实施例的抓采系统的结构示意图。
19.图3是根据本发明实施例的无人机的结构示意图。
具体实施方式
20.为了更清楚地说明本发明的技术方案,列举如下实施例。实施例中所出现的原料、反应和后处理手段,除非特别声明,均为市面上常见原料,以及本领域技术人员所熟知的技术手段。
21.如图1所示,本实施例的一种户外样品采集装置,包括:无人机100;所述无人机100包括机身110、设置在所述机身110内部的动力元件、设置在所述机身110下部的支架120、设置在所述机身110上部的飞行螺旋桨130和反力螺旋桨140,其中,所述飞行螺旋桨130用于无人机100升降,所述反力螺旋桨140用于提供下降力;由所述无人机100中的动力元件驱动的抓采系统200;搭载于所述无人机100机身110下部,由所述反力螺旋桨140提供下降力。其中,装置中的无人机100和抓采系统200两者可集成于一体;也可以是可拆卸固定安装,拆卸后无人机100可以独立完成飞行勘探工作。
22.如图2所示,所述抓采系统200包括第一抓斗210、第二抓斗220、第一抓斗连杆230、第二抓斗连杆240、第一铰接件250、第二铰接件260、抓斗滑块270、抓斗支架280;所述第一抓斗210设置有第一一连接杆211和第一二连接杆212;所述第二抓斗220设置有第二一连接杆221和第二二连接杆222;所述抓斗滑块270两端设置有铰接固定件271;所述抓斗支架280一端与无人机100机身110下部固定连接,另一端分别与第一抓斗210的第一一连接杆211、第二抓斗220的第二一连接杆221固定连接;抓斗滑块270两端的铰接固定件271分别与第一抓斗连杆230、第二抓斗连杆240铰接;第一铰接件250一端与第一抓斗连杆230铰接,另一端与第一抓斗的第一二连接杆212固定连接;第二铰接件260一端与第二抓斗连杆240铰接,另一端与第二抓斗的第二二连接杆222固定连接;抓斗滑块270穿过抓斗支架280进行滑动连接,带动第一抓斗连杆230、第二抓斗连杆240运动,带动第一抓斗210、第二抓斗220作开合运动。此外,第一抓斗210、第二抓斗220可以配置不同型号,根据需要调整第一抓斗210、第二抓斗220大小,其中包括行业标准规定尺寸,所取得样品重量符合科研需求。本实施例中采用的第一抓斗210、第二抓斗220组合形成贝壳式抓斗。由无人机100中的动力元件驱动抓采系统200,抓采系统200中,抓斗滑块270和抓斗支架280采用滑动连接,抓取时,抓斗支架280固定,当抓斗滑块270向下滑动时,带动第一抓斗连杆230、第二抓斗连杆240运动,进而带动第一抓斗210、第二抓斗220闭合,当抓斗滑块270向上运动时,带动第一抓斗连杆230、第二抓斗连杆240向上移动,带动第一抓斗210、第二抓斗220张开。
23.其中,为获取掘进力度,所述第一抓斗连杆230、第二抓斗连杆240内均设置有压力传感器,通过对传感器的数据进行分析,进而计算出第一抓斗210、第二抓斗220与地面的接触情况,并实时向装置传输采集过程中的压力数据,装置根据回传的压力数据来调节平衡螺旋桨140转速进而调节抓采压力。
24.本实施例中,如图3所示,支架120至少包括三个,设置在所述机身110下部,所述支架120内部设置压力传感器,用以感知支架120与地面接触情况;为了达到对机身进行稳定调平,使实现适应不同地形的目的,支架120可独立伸缩。本实施例的支架120可采用液压支架。在其他实施例中,支架120也可为其他驱动方式的支架,比如电机驱动等方式。
25.飞行螺旋桨130用于控制飞行速度、飞行方向与飞行轨迹,为装置提供升降力,可以保证较大的起飞重量。
26.而抓采系统2掘进过程中需要下降力,为保证在掘进过程中有足够的压力,尤其是
对于硬土,单独依靠整体设备重量难以完全提供足够的压力,通过设置反力螺旋桨140,为装置提供方向向下的下降力。
27.飞行螺旋桨130与反力螺旋桨140两种螺旋桨功能不同,由功能不同需要采用两种不同分布形式的螺旋桨。其中,机身110及内部系统为现有技术,保障无人机各项功能的实施。其中,飞行螺旋桨130与反力螺旋桨140的结构均为现有结构。在具体实施中,飞行螺旋桨130与反力螺旋桨140由无人机动力元件提供动力。
28.所述无人机100还包括飞行支撑臂131和增压支撑臂141;飞行支撑臂131沿无人机100机身110中轴线为中心均匀对称设置于机身110侧面;飞行螺旋桨130固定于飞行支撑臂131上;增压支撑臂141沿无人机100机身110中轴线为中心均匀对称设置于机身110顶部;反力螺旋桨140固定于增压支撑臂141上。
29.为保证飞行螺旋桨130与反力螺旋桨140两者之间在运行中气流不会产生过于强烈的影响,所述增压支撑臂141长度短于飞行支撑臂131长度,增压支撑臂141与飞行支撑臂131依次错开排列,飞行螺旋桨130设置于无人机机身110侧边外围,而反力螺旋桨140相对于飞行螺旋桨130位置错开排列,呈包围状设置。
30.为了更好地指导无人机的飞行路径,还包括摄像系统,搭载于无人机机身110下部,所述摄像系统用以指导无人机飞行路径及拍摄待取样黄土。摄像系统通过蓝牙、wifi等无线通讯模块回传飞行路径与拍摄图像。
31.户外样品采集装置的工作方法,包括以下步骤:s1.获取目的地信息,控制无人机(100)飞至样品采集目的地上方;s2.当所述无人机到达目的地上方的预设距离后,发出降落信号,无人机(100)接收降落信号后,调节飞行螺旋桨(130)的转速,保持水平降落直至支架(120)接触地面后;s3.根据各个支架(120)中压力传感器传输的压力信号判断各个支架(120)与地面的接触情况,当判断为接触不良时,伸缩支架(120),直至各个支架(120)与地面接触良好;s4.控制无人机(100)关停飞行螺旋桨(130);s5.发出采集信号,抓采系统(200)接收采集信号后,控制抓斗滑块(270)向下滑动,带动第一抓斗(210)和第二抓斗(220)张开;s6.开启反力螺旋桨(140),装置控制抓采系统(200)开始掘土;s7.在掘进过程中,根据第一抓斗连杆(230)和第二抓斗连杆(240)中压力传感器实时传输压力信号判断第一抓斗(210)和第二抓斗(220)与地面的接触情况,当判断为接触不良时,调节反力螺旋桨(140)转速来调节抓采压力,直至达到预设掘进深度,完成掘进;s8.抓采系统(200)控制抓斗滑块(270)向上滑动,带动第一抓斗(210)和第二抓斗(220)关闭,以获取土样;s9.发出采样完成信号,控制无人机(100)关闭反力螺旋桨(140),开启飞行螺旋桨(130);s10.控制无人机(100)飞回,带回采集的土样。
32.其中,在所述步骤s1包括:通过远程遥控器的操控信号,控制所述无人机(100)运动;或者通过在所述装置内设置的定位系统接收的目的地位置坐标,控制所述无人机(100)运动到所述目的地。
33.下面以通过人工远程遥控器控制为例来详细说明本实施例的户外样品采集装置的工作方法:s1. 人工远程遥控器控制无人机飞行,并通过摄像系统,指导无人机飞行路径,控制无人机100飞至样品采集目的地上方;s2.到达目的地后,远程遥控器发出控制降落信号,无人机100接收降落信号后,调节飞行螺旋桨130的转速,使装置缓慢下降,保持水平降落直至支架120接触地面后;s3.根据各个支架120中压力传感器传输的压力信号判断各个支架120与地面的接触情况,当判断为接触不良时,伸缩支架120,直至各个支架120与地面接触良好;s4.当支架120接触地面良好、装置稳定降落后,无人机100关停飞行螺旋桨130;s5. 远程遥控器发出采集信号,装置接收该信号后控制抓采系统200进行抓采,控制抓斗滑块270向下滑动,在抓斗滑块270的带动下开启第一抓斗连杆230和第二抓斗连杆240,带动第一抓斗210和第二抓斗220张开;s6.装置开启反力螺旋桨140,控制抓采系统200开始掘土;s7.在掘进过程中,装置根据第一抓斗连杆230和第二抓斗连杆240中压力传感器实时传输压力信号判断第一抓斗210和第二抓斗220与地面的接触情况,当判断第一抓斗210为接触不良时,调节第一抓斗210该位置上对应的反力螺旋桨140转速来调节第一抓斗210压力,由装置根据实时传输的压力信号来调节抓斗系统200,直至达到预设掘进深度,完成掘进;s8.抓采系统200控制抓斗滑块270向上滑动,带动第一抓斗210和第二抓斗220关闭,以获取土样;s9.控制无人机100关闭反力螺旋桨140,开启飞行螺旋桨130,并向远程遥控器发出采样完成信号,远程遥控器接收采样完成信号后亮灯通知用户;s10.远程遥控器控制无人机100飞回,带回采集的土样。
34.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。
35.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。