1.本发明涉及一种面向固定翼无人机海上回收的拦阻钩测试系统及方法。
背景技术:
2.无人机和无人船在海洋环境监测、海洋测绘、海上巡逻救援等领域有极其重要的作用。在远洋环境监测等应用场景中,由于舰船的运动速度和机动性能力限制,很难在短时间内进行大范围的海洋环境覆盖式监测。而固定翼无人机具有速度快、机动性强、活动范围大、续航时间长等优点,可以快速进行大范围覆盖式环境监控,特别是当多架无人机同时协同作业时,可极大程度提高作业效率。另外固定翼无人机技术相对成熟,研制成本低,且小型固定翼无人机可采用箱式存储,具有占用空间小等优势,已经得到广泛应用,如果能将无人船和小型固定翼无人机结合起来,无人船作为无人机的母舰,提供能源供应、统一规划和放置存储,无人机作为大范围快速高效搜索作业工具,将极大拓展无人机-无人船子母平台在海洋环境中的应用,有极大的研究价值。
3.舰载固定翼无人机着舰回收方式种类繁多,目前常见的着舰回收方式包括:跑道拦阻着舰、撞网回收、降落伞/翼伞回收、绳钩回收、天钩回收、过失速回收、智能飞落着舰、风向筒回收、秋千式吊架回收等方式。然而无论哪种回收机制均具备一定风险,尤其是技术尚不成熟的测试阶段,而在测试阶段中,如何安全有效地针对固定翼无人机海上回收的绳钩拦阻方式进行地面测试是需要考虑的问题。
技术实现要素:
4.本发明的目的在于提供一种面向固定翼无人机海上回收的拦阻钩测试系统及方法,测试成本低且能对拦阻钩动作时的瞬间进行深入分析,并通过大量试验测试可分析估算出回收绳的最优拉力以及拦阻钩最佳参数,为相关机构设计提供依据。
5.本发明的目的是通过以下技术方案来实现的:
6.一种面向固定翼无人机海上回收的拦阻钩测试系统,包括导向架体、模拟测试车、回收绳高度调节组件、缓冲架体、回收绳、回收绳转向组件和回收绳收放组件,其中模拟测试车可移动地设于导向架体中,缓冲架体设于导向架体一侧,并且所述缓冲架体两侧均设有回收绳高度调节组件,所述回收绳高度调节组件设有可升降的滑块,且所述滑块上设有回收绳转向组件,所述回收绳转向组件设有张力传感器,每个回收绳高度调节组件底端均设有回收绳收放组件,且回收绳两端分别绕过对应侧回收绳转向组件上的张力传感器后绕置于对应侧的回收绳收放组件中,所述模拟测试车下侧设有拦阻钩与所述回收绳配合,所述模拟测试车上设有参数捕捉模块,任一回收绳高度调节组件上设有云台摄像机。
7.所述导向架体上端设有顶板,所述模拟测试车包括车体,且所述车体上侧与所述顶板滑动连接,所述车体两侧均设有弹性气缸、连杆臂组件和车轮,其中所述车轮轮轴端部设有轮座,所述连杆臂组件一端与所述车体铰接,另一端与对应侧的轮座铰接,所述弹性气缸下端与所述车体下侧铰接、上端与对应侧的连杆臂组件铰接。
8.所述顶板下侧设有导轨,所述车体上侧设有导向吊杆,且所述导向吊杆上端设有导向滑轮与所述顶板下侧的导轨配合。
9.所述连杆臂组件包括第一连杆臂和第二连杆臂,其中第一连杆臂一端与对应侧轮座的上侧铰接、另一端与所述车体上侧铰接,第二连杆臂一端与对应侧轮座的下侧铰接、另一端所述车体下侧铰接,所述弹性气缸上端与所述第一连杆臂铰接。
10.所述回收绳高度调节组件包括支杆和设于所述支杆上的皮带、带轮和调节驱动装置,其中支杆上下两端均设有带轮,所述皮带两端分别绕过对应端的带轮,且任一端带轮通过所述调节驱动装置驱动转动,所述滑块与皮带一侧固连。
11.所述回收绳转向组件包括第一导向元件、张力传感器、第一张紧夹板、第二张紧夹板和第二导向元件,回收绳经由第一导向元件引导输入后绕过张力传感器,并穿过第一张紧夹板和第二张紧夹板之间后经由第二导向元件引导输出。
12.所述回收绳转向组件设有弹簧轴和弹簧,且所述弹簧轴穿过所述第一张紧夹板和第二张紧夹板,所述弹簧轴靠近第一张紧夹板一端设有弹簧和弹簧压板,并且所述弹簧一端与所述弹簧压板相抵、另一端与所述第一张紧夹板相抵。
13.所述回收绳收放组件包括安装架体和设于所述安装架体上的绕线轮和收放驱动装置,所述安装架体上端设有导向环,所述回收绳穿过所述导向环后缠绕于所述绕线轮上,所述绕线轮通过所述收放驱动装置驱动旋转。
14.一种所述的面向固定翼无人机海上回收的拦阻钩测试系统的方法:
15.包括如下步骤:
16.步骤一:构建神经网络;
17.步骤二:通过多种不同输入条件下的试验获得多种回收试验结果;
18.步骤三:将步骤二的输入条件和试验结果作为输入输出参数对所述神经网络进行训练,并采用下降梯度法迭代求解该神经网络的权重值与偏置,公式如下:
[0019][0020]
上式中m是测试结果数据集中点的个数,y是测试的输出结果值,h是通过神经网络预测的值,j(w,b)是一个关于权重值w和偏置b的函数,通过求解j(w,b)的最优解,确定神经网络中的参数;
[0021]
步骤四:根据最优解参数对拦阻钩(201)进行设计。
[0022]
步骤一中,利用在模拟回收过程中产生的数据构建4层神经网络,所述神经网络包括23个神经元,其中包括输入层7个神经元和输出层5个神经元;
[0023]
输入层7个神经元分别表示无人机入射速度、材料直径、拦阻钩材料、拦阻钩长度、拦阻钩末端关节弹性、拦阻钩末端关节阻尼以及无人机相对回收绳的入射高度;
[0024]
输出层的5个神经元分别表示回收绳初始的5个张紧状态:状态a(很紧)、状态b(紧)、状态c(正常)、状态d(松)、状态e(很松);
[0025]
采用s型神经元网络,即每个神经元输出为:
[0026][0027]
上式中xj代表上一层第j个神经元的输出值,wj代表上一层第j个神经元的权重值,b代笔本神经网络的偏置。
[0028]
本发明的优点与积极效果为:
[0029]
本发明能够极大降低海上真实甲板测试带来的风险,同时能够控制测试成本,最大程度减小试验失败带来的经济损失,并且能够从数据、图像等多方面辅助测试人员对拦阻钩动作时的瞬间进行深入分析,同时通过大量试验测试,可以估算出回收绳的最优拉力以及拦阻钩最佳参数,为设计面向固定翼无人机海上回收的拦阻机构提供依据。
附图说明
[0030]
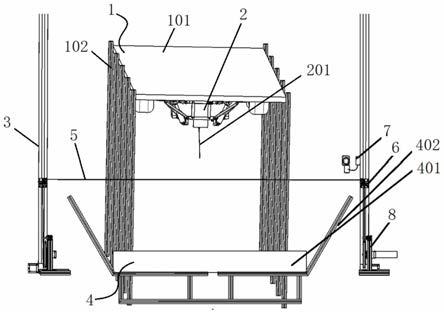
图1为本发明系统的结构示意图,
[0031]
图2为图1中本发明系统的侧视图,
[0032]
图3为图1中的模拟测试车和导向架体的主视图,
[0033]
图4为图3中的模拟测试车放大示意图,
[0034]
图5为图1中的回收绳高度调节组件结构示意图,
[0035]
图6为图1中的回收绳转向组件结构示意图,
[0036]
图7为图1中的回收绳收放组件结构示意图,
[0037]
图8为图1中模拟测试车下侧的拦阻钩结构示意图,
[0038]
图9为本发明方法构建的神经网络示意图。
[0039]
其中,1为导向架体,101为顶板,102为侧支梁,2为模拟测试车,201为拦阻钩,2011为舵机,202为车体,2021为气缸安装座,203为导向吊杆,204为导向滑轮,205为弹性气缸,206为连杆臂组件,2061为第一连杆臂,2062为第二连杆臂,207为车轮,2071为轮座,3为回收绳高度调节组件,301为调节驱动装置,302为滑块,303为皮带,304为支杆,4为缓冲架体,401为缓冲垫,402为侧挡架,5为回收绳,6为回收绳转向组件,601为第一导向元件,602为第二张紧夹板,603为张力传感器,604为弹簧,605为第一张紧夹板,606为第二导向元件,607为弹簧轴,7为云台摄像机,8为回收绳收放组件,801为安装架体,8011为底架,8012为立架,8013为导向架,802为绕线轮,803为卡线扣,804为挡板,805为收放驱动装置,806为导向环。
具体实施方式
[0040]
下面结合附图对本发明作进一步详述。
[0041]
如图1~9所示,本发明包括导向架体1、模拟测试车2、回收绳高度调节组件3、缓冲架体4、回收绳5、回收绳转向组件6、云台摄像机7和回收绳收放组件8,其中如图2所示,模拟测试车2可移动地设于导向架体1中,缓冲架体4设于导向架体1一侧,并且如图1所示,所述缓冲架体4两侧均设有回收绳高度调节组件3,如图5所示,所述回收绳高度调节组件3设有可升降移动的滑块302,且所述滑块302上设有回收绳转向组件6,如图6所示,所述回收绳转向组件6设有张力传感器603,如图1所示,每个回收绳高度调节组件3底端均设有回收绳收放组件8,且所述回收绳5两端分别绕过对应侧回收绳转向组件6上的张力传感器603后绕置
于对应侧的回收绳收放组件8中,所述张力传感器603引导回收绳5转向的同时,也能够获得拦阻试验全过程的回收绳5张力数据,所述张力传感器603为本领域公知技术且为市购产品,如图1~2所示,所述模拟测试车2下侧设有拦阻钩201与所述回收绳5配合,另外所述模拟测试车2上设有参数捕捉模块实时获取模拟测试车2的位姿信息,任一回收绳高度调节组件3上设有云台摄像机7用于拍摄拦阻钩201钩挂回收绳5瞬间形态,所述参数捕捉模块、张力传感器603和云台摄像机7获得的数据通过本发明系统的分析模块进行分析,以为拦阻钩201和相关机构设计提供依据。
[0042]
如图3~4所示,所述导向架体1包括顶板101和支撑所述顶板101两侧的侧支梁102,所述顶板101下侧设有导轨,所述模拟测试车2包括车体202、弹性气缸205、连杆臂组件206和车轮207,其中所述车体202上侧设有导向吊杆203,且所述导向吊杆203上端设有导向滑轮204与所述顶板101下侧的导轨配合,本实施例中所述导向滑轮204采用高速铜合金轴承完全嵌入导轨中实现吊挂滑动,所述导轨具备5
°
向下倾斜角度,帮助模拟测试车2加速至16米/秒。所述车体202两侧均设有弹性气缸205、连杆臂组件206和车轮207,其中所述车轮207轮轴端部设有轮座2071,所述轮座2071上设有驱动电机驱动车轮207沿着所述顶部101下侧转动,进而实现模拟测试车2的移动,所述连杆臂组件206一端与所述车体202铰接,另一端与对应侧的轮座2071铰接,所述弹性气缸205下端与所述车体202下侧铰接、上端与对应侧的连杆臂组件206铰接。本实施例中,所述车轮207采用橡胶轮胎,其随着车速变快抓地力变大,弹性气缸205和连杆臂组件206则可以有效规避顶板101下侧或导轨不平整带来的干扰,并可以适当调整车体姿态。本实施例中,所述模拟测试车2长宽高尺寸为549毫米
×
368毫米
×
232毫米,轴距329毫米,重量4千克,采用2400千伏无刷电机驱动,最高车速90千米/小时,所述模拟测试车2用于模拟固定翼无人机高速回收移动过程。
[0043]
如图4所示,本实施例中,所述连杆臂组件206包括第一连杆臂2061和第二连杆臂2062,所述第一连杆臂2061和第二连杆臂2062均呈三角支架形状,其中第一连杆臂2061一端与对应侧轮座2071的上侧铰接、另一端与所述车体202上侧铰接,第二连杆臂2062一端与对应侧轮座2071的下侧铰接、另一端所述车体202下侧铰接,所述车体202下侧设有气缸安装座2021,所述弹性气缸205下端铰接于所述气缸安装座2021上,所述弹性气缸205上端与所述第一连杆臂2061铰接。
[0044]
如图5所示,所述回收绳高度调节组件3包括支杆304和设于所述支杆304上的皮带303、带轮和调节驱动装置301,其中支杆304上下两端均设有带轮,所述皮带303两端分别绕过对应端的带轮,且任一端带轮通过所述调节驱动装置301驱动转动,进而实现皮带303移动,所述滑块302与皮带303一侧固连。本实施例中,所述调节驱动装置301可采用伺服减速电机。如图1所示,所述滑块302升降移动调节所述回收绳转向组件6高度的同时也调节所述回收绳5的高度。
[0045]
如图6所示,所述回收绳转向组件6包括底座和设于所述底座上的第一导向元件601、张力传感器603、第一张紧夹板605、第二张紧夹板602、弹簧轴607、弹簧604和第二导向元件606,其中回收绳5经由第一导向元件601引导输入后绕过张力传感器603后进入第一张紧夹板605和第二张紧夹板602之间,所述弹簧轴607穿过所述第一张紧夹板605和第二张紧夹板602,且所述弹簧轴607靠近第一张紧夹板605一端设有弹簧604和弹簧压板、另一端穿过设于所述底座上的限位块后与一个螺母螺纹连接,所述弹簧604一端与所述弹簧压板相
抵、另一端与所述第一张紧夹板605相抵,所述弹簧604提供弹力使第一张紧夹板605和第二张紧夹板602配合夹紧所述回收绳5实现预紧,而旋拧所述弹簧轴607,所述弹簧轴607即可移动调节所述弹簧604的压缩量,也即调节两个张紧夹板的预紧力,所述回收绳5由第一张紧夹板605和第二张紧夹板602之间输出后经由第二导向元件606引导输出。所述底座安装于对应侧回收绳高度调节组件3的滑块302上,另外本实施例中,所述第一导向元件601和第二导向元件606可采用导向铜片等结构,此为本领域公知技术。
[0046]
如图7所示,所述回收绳收放组件8包括安装架体801和设于所述安装架体801上的绕线轮802和收放驱动装置805,所述安装架体801上端设有导向环806,所述回收绳5穿过所述导向环806后缠绕于所述绕线轮802上,所述绕线轮802上设有卡线扣803用于固定回收绳5末端,所述绕线轮802通过所述收放驱动装置805驱动旋转实现回收绳5收放,且所述绕线轮802远离所述收放驱动装置805一侧设有挡板804防止回收绳5脱离,本实施例中,所述收放驱动装置805采用减速伺服电机。
[0047]
如图7所示,本实施例中,所述安装架体801包括底架8011、立架8012和导向架8013,其中立架8012垂直设于所述底架8011上,所述立架8012上端设有导向架8013,所述绕线轮802和收放驱动装置805均安装于所述立架8012上,所述导向环806安装于所述导向架8013上。
[0048]
如图1所示,所述缓冲架体4上设有海绵制成的缓冲垫401,所述缓冲架体4两侧设有侧挡架402,当模拟测试车2回收失败飞出顶板101下侧的导轨时可落于所述缓冲垫401上,从而有效保护模拟测试车2。
[0049]
如图8所示,本实施例中,所述模拟测试车2下侧设有舵机2011,所述拦阻钩201通过所述舵机2011驱动转动调节角度,以使其能钩挂于所述回收绳5上。所述舵机2011为本领域公知技术且为市购产品。
[0050]
所述模拟测试车2上的参数捕捉模块包括sbg-imu模块和加速度计,另外还加装了差分gps定位装置,能够获取定位信息,精度1毫米,采集频率50赫兹,同时该模块能够获取模拟测试车2姿态角度并存储于车载sd卡中。所述sbg-imu模块、加速度计、差分gps定位装置均为本领域公知技术。另外如图1所示,本实施例中,所述云台摄像机7采用32倍慢速镜头摄像机,最高捕捉速度为960帧/秒,能够拍摄出拦阻钩201钩挂回收绳5瞬间,拦阻钩201和回收绳5的形态变化。所述云台摄像机7为市购产品。
[0051]
本发明的工作原理为:
[0052]
本发明系统工作时,所述模拟测试车2沿着导向架体1的顶部101下侧移动模拟无人机回收移动过程,回收绳5两端分别绕过对应侧的回收绳转向组件6后绕置于对应侧回收绳收放组件8的绕线轮802上,且所述绕线轮802通过收放驱动装置805驱动旋转实现回收绳5收放,进而实现回收绳5张紧或放松,所述回收绳转向组件6设于对应侧的回收绳高度组件3上的滑块302上,并通过所述滑块302驱动调整高度,同时所述回收绳转向组件6上的张力传感器603在引导回收绳5转向同时也实时监测回收绳5的张紧力,所述模拟测试车2上设有参数捕捉模块实时获取模拟测试车2的位姿信息,所述云台摄像机7用于拍摄出拦阻钩201钩挂回收绳5瞬间,拦阻钩201和回收绳5的形态变化,而所述参数捕捉模块、张力传感器603和云台摄像机7获得数据传输至系统分析模块进行分析,并根据分析结果设计拦阻钩201及相关机构结构。
[0053]
本发明方法包括如下步骤:
[0054]
步骤一:构建神经网络。
[0055]
如图9所示,本发明利用模拟测试车2模拟固定翼无人机高速回收,系统分析模块利用在回收过程中产生的数据构建4层神经网络,其包括23个神经元,其中包括输入层7个神经元和输出层5个神经元。
[0056]
输入层7个神经元分别表示无人机入射速度、材料直径、拦阻钩材料、拦阻钩长度、拦阻钩末端关节弹性、拦阻钩末端关节阻尼以及无人机相对回收绳5的入射高度,本实施例中,上述神经元具体获得过程如下:无人机速度由参数捕捉模块中的imu设备获取;材料直径为拦阻钩201的直径;钩材料采用离散点:分别为铝合金(1)、钢(2)、钛合金(3);钩长度为制作拦阻钩201的总长度;关节弹性通过拦阻钩201末端与舵机2011连接的卷簧不同弹性性能确定;关节阻尼通过拦阻钩201采用阻尼油的属性确定;入射高度通过回收绳高度调节组件3中的滑块302高度确认。
[0057]
输出层的5个神经元分别表示回收绳5初始的5个张紧状态:状态a(很紧)、状态b(紧)、状态c(正常)、状态d(松)、状态e(很松),本发明采用s型神经元网络,即每个神经元输出为:
[0058][0059]
上式(1)中xj代表上一层第j个神经元的输出值,wj代表上一层第j个神经元的权重值,b代笔本神经网络的偏置。
[0060]
步骤二:通过多种不同输入条件下的试验获得多种回收试验结果。
[0061]
步骤三:将步骤二的输入条件和试验结果作为输入输出参数对所述神经网络进行训练,并采用下降梯度法迭代求解该神经网络的权重值与偏置,公式如下:
[0062][0063]
上式(2)中m是测试结果数据集中点的个数,y是测试的输出结果值,h是我们通过神经网络预测的值,因此j(w,b)是一个关于权重值w和偏置b的函数,通过求解j(w,b)的最优解,确定神经网络中的参数。
[0064]
步骤四:根据步骤三获得的最优解参数对拦阻钩201进行设计。
[0065]
下面列举一个实施例进一步说明。
[0066]
步骤一:构建如图9所示的神经网络。
[0067]
步骤二:进行多种不同输入条件下的试验,并获得不同的回收试验结果,其中输入变量如下表1所示,包括:
[0068][0069]
表1
[0070]
不同输入条件下的最终测试统计结果如下表2所示:
[0071][0072]
表2
[0073]
步骤三:根据步骤二的输入条件和试验结果作为输入输出参数对神经网络进行训练,解算出所有神经元对应的参数,参数列表3如下:
[0074]
编号输入层隐藏层1隐藏层2输出层1w=0.24,b=0.026w=0.04,b=0.13w=0.02,b=0.02w=0.03,b=0.162w=0.12,b=0.01w=0.04,b=0.05w=0.01,b=0.07w=0.012,b=0.173w=-0.03,b=0.18w=-0.18,b=0.17w=-0.1,b=0.17w=-0.11,b=0.064w=-0.2,b=0.07w=-0.12,b=0.28w=-0.12,b=0.13w=-0.07,b=0.0765w=0.02,b=0.04w=0.02,b=0.20w=0.06,b=0.09w=0.03,b=0.026w=0.03,b=0.09w=0.07,b=0.14
ꢀꢀ
7w=-0.06,b=0.13
ꢀꢀꢀ
[0075]
表3
[0076]
根据上述参数和上式(2)采用下降梯度法迭代求解该神经网络的权重值与偏置j(w,b),并求解j(w,b)最优解,获得的最优解如下表4所示。
[0077]
编号输入层隐藏层1隐藏层2输出层1w=0.24,b=0.026w=0.04.b=0.13w=0.02,b=0.02w=0.03.b=0.162w=0.12.b=0.01w=0.04.b=0.05w=0.01,b=0.07w=0.012,b=0.173w=-0.03,b=0.18w=-0.18,b=0.17w=-0.1.b=0.17w=-0.11,b=0.06
[0078]
表4
[0079]
步骤四:根据上表4对拦阻钩201进行设计,最终得到的拦阻钩201最优参数为:钩
子直径1.5mm,入射速度12m/s,钩子入射高度23cm,卷簧弹性0.3nm/
°
,具备一定的阻尼油。