1.本发明涉及无人机探伤技术领域,尤其涉及一种用于管道的无人机探伤装置。
背景技术:
2.管道探伤检测器械在生产中常用到的,日常的输送管道通常是在钢管上涂敷有一层或几层防腐涂层而制得,管道上所涂敷的防腐涂层致密性会严重影响输送管道的使用寿命及性能,即若防腐涂层存在致密性缺陷,管道在使用过程中则会很容易地被腐蚀,严重的可能导致管道发生泄漏,甚至引发事故,普通的管道探伤检测技术检测的不够精确,且在检测时候需要人工上料、人工下料,劳动强度很大,很多检测仪器都只能检测统一的管道,太过于单一,检测直径不同的管道时还需要换仪器,使用起来不方便,为此,我们提出一种管道探伤检测系统。近年来,在电子与航空技术飞速发展的推动下,无人机技术受到了广泛关注,并且在其他技术领域中也得到了应用,从而推动了其他技术领域的发展,但是,在管道监测领域中无人机技术还未得到广泛的结合,无人机通常只能飞行在高空对管道的上表面进行检测,无法对管道进行360
°
全方位的检测。
技术实现要素:
3.本发明的目的是为了解决上述的问题,而提出的一种用于管道的无人机探伤装置。
4.为了实现上述目的,本发明采用了如下技术方案:
5.一种用于管道的无人机探伤装置,包括无人机本体,所述无人机本体的底端设置有升降调节机构;
6.所述升降调节机构的底端对称设置有两个连接臂,所述升降调节机构用于调节连接臂的高度;
7.所述连接臂的内表面设置有至少一个探伤探头。
8.可选地,两个所述连接臂对称设置。
9.可选地,所述升降调节机构由伺服电机、固定架、自锁传动机构、滚珠螺母和滚珠丝杠构成;
10.所述伺服电机通过固定架安装在无人机本体上;
11.所述滚珠螺母与滚珠丝杠螺栓连接,所述滚珠螺母转动连接在无人机本体上;
12.所述伺服电机通过自锁传动机构与滚珠螺母连接。
13.可选地,所述自锁传动机构由蜗轮和蜗杆构成;
14.所述蜗杆与蜗轮啮合,所述蜗轮与滚珠螺母键连接,所述蜗杆与伺服电机的输出轴固定连接,所述蜗杆的另一端转动连接在支架上,所述支架与无人机本体固定连接。
15.可选地,所述角度调节机构由齿轮组、主动齿轮、齿条、推杆电机构成;
16.可选地,所述连接臂采用中空结构,所述连接臂通过软管与气泵的出气端连通,所述连接臂的内表面设置有至少一个喷头。
17.所述推杆电机通过固定架安装在无人机本体上;
18.所述推杆电机的输出杆与齿条固定连接,所述齿条与主动齿轮啮合,所述主动齿轮与齿轮组连接;
19.所述主动齿轮和齿轮组均轴连接在板体上,所述板体与滚珠丝杠的底端固定连接;
20.所述齿轮组由两个从动齿轮相互啮合构成,两个从动齿轮分别与两个连接臂固定连接。
21.可选地,所述支架的底端设置有滑套,所述齿条与滑套滑动连接。
22.本发明具备以下优点:
23.本发明通过设置连接臂,连接臂4可以采用弯曲的弧形、半圆形结构,从而可以对管道进行较好的覆盖,在连接臂上设置多个探伤探头可以对管道进行360
°
全方位的检测。
24.本发明通过设置升降调节机构,通过伺服电机提供动力,通过蜗杆和蜗轮将水平方向上的力矩转化为滚珠螺母的旋转运动,滚珠螺母转动后可以带动滚珠丝杠上下运动,最终实现连接臂的上下运动。当连接臂上下运动后,一方面可以实现对连接臂更加精准的高度调节,另一方面可以将连接臂抬起后,便于无人机支撑脚的支撑。
25.本发明通过设置角度调节机构,通过推杆电机提供动力,推杆电机的输出杆伸缩运动时,会带动齿条伸缩运动,齿条伸缩运动后会带动主动齿轮转动,主动齿轮转动后会带动齿轮组运动,齿轮组中的两个从动齿轮会相反转动,从而带动两个连接臂张合,两个连接臂张合后可以便于包裹或者从管道上脱离。
附图说明
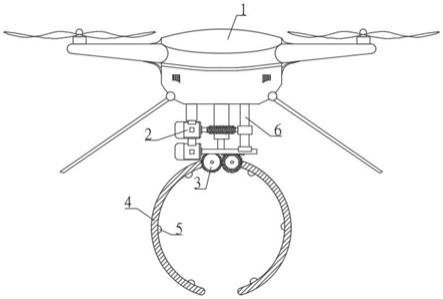
26.图1为本发明的整体结构示意图;
27.图2为本发明中探伤探头探测范围示意图;
28.图3为本发明中升降调节机构的结构示意图;
29.图4为本发明中角度调节机构的结构示意图;
30.图5为本发明中喷头、软管和气泵示意图。
31.图中:1无人机本体、2升降调节机构、21固定架、22伺服电机、23滚珠螺母、24蜗轮、25蜗杆、26滚珠丝杠、3角度调节机构、31齿轮组、32主动齿轮、33齿条、34推杆电机、35滑套、4连接臂、5探伤探头、6支架、7气泵、8软管、9喷头。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
33.参照图1-3,一种用于管道的无人机探伤装置,包括无人机本体1,无人机本体1的底端设置有升降调节机构2。
34.升降调节机构2的底端对称设置有两个连接臂4,升降调节机构2用于调节连接臂4的高度。
35.参照图3,升降调节机构2由伺服电机22、固定架21、自锁传动机构、滚珠螺母23和滚珠丝杠26构成,具体连接方式如下:
36.伺服电机22通过固定架21安装在无人机本体1上,伺服电机22用于提供动力。
37.滚珠螺母23与滚珠丝杠26螺栓连接,滚珠螺母23转动连接在无人机本体1上,滚珠螺母23和滚珠丝杠26的设置可以实现升降运动。
38.伺服电机22通过自锁传动机构与滚珠螺母23连接,自锁传动机构是指具备自锁功能的传动机构。
39.参照图4,自锁传动机构由蜗轮24和蜗杆25构成,具体如下:
40.蜗杆25与蜗轮24啮合,蜗轮24与滚珠螺母23键连接,蜗杆25与伺服电机22的输出轴固定连接,蜗杆25的另一端转动连接在支架6上,支架6与无人机本体1固定连接。
41.蜗杆25和蜗轮24的设置可以起到传动的作用,将水平方向上的力矩转化为滚珠螺母23的旋转运动,滚珠螺母23转动后可以带动滚珠丝杠26上下运动,最终实现连接臂4的上下运动。当连接臂4上下运动后,一方面可以实现对连接臂4更加精准的高度调节,另一方面可以将连接臂4抬起后,便于无人机支撑脚的支撑。
42.在本实施例中,两个连接臂4对称设置,具体如图2所示,连接臂4可以采用弯曲的弧形、半圆形结构,从而可以对管道进行较好的覆盖。
43.连接臂4的内表面设置有至少一个探伤探头5,探伤探头5可以采用ccd镜头、cmos镜头、红外镜头、温感镜头等,可以根据管道的类型进行选择。
44.实施例二
45.参照图1-图4,本实施例在实施例一的基础上,进一步设置了角度调节机构3,角度调节机构3由齿轮组31、主动齿轮32、齿条33、推杆电机34构成,具体连接方式如下:
46.推杆电机34通过固定架21安装在无人机本体1上,推杆电机35可以带动输出杆伸缩运动。
47.推杆电机34的输出杆与齿条33固定连接,齿条33与主动齿轮32啮合,主动齿轮32与齿轮组31连接。
48.主动齿轮32和齿轮组31均轴连接在板体上,板体与滚珠丝杠26的底端固定连接,齿轮组31由两个从动齿轮相互啮合构成,两个从动齿轮分别与两个连接臂4固定连接。
49.当推杆电机34的输出杆伸缩运动时,会带动齿条33伸缩运动,齿条33伸缩运动后会带动主动齿轮32转动,主动齿轮32转动后会带动齿轮组31运动,齿轮组31中的两个从动齿轮会相反转动,从而带动两个连接臂4张合,两个连接臂4张合后可以便于包裹或者从管道上脱离。
50.实施例三
51.参照图5,连接臂4采用中空结构,连接臂4通过软管8与气泵7的出气端连通,气泵7可以安装在支架6上,也可以安装在无人机本体1上,并与无人机本体1总线连接,连接臂4的内表面设置有至少一个喷头9。
52.通过喷头9的设置,一方面可以对管道的外表面进行针对的清洁,从而可以将附着的灰尘、杂质、树叶等吹走,另一方面,通过碰头9的设置,在喷气的气压的作用下,可以最大化避免在无人机抖动时连接臂4与管道的频繁碰触。
53.以上所述,仅为本发明较佳的具体实施方式,这里无法对所有的实施方式予以穷举,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发
明的保护范围之内。