1.本发明涉及无人机技术领域,具体涉及一种无人机折叠臂及无人机。
背景技术:
2.无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。
3.现有的固定翼无人机,由于机翼是固定的,所以成为最易损的部件之一,且由于机翼是固定的,飞行效率不是很理想,固定的长度在某些状况下飞行也会影响其在飞行过程中的稳定度,其次,由于机翼是固定的,无法折叠,仓储空间太大,使用不方便,限制了无人机的携带与使用,这些都有待进一步优化与改进。
技术实现要素:
4.为了克服上述的技术问题,本发明的目的在于提供一种无人机折叠臂及无人机,相较于传统的无人机,本发明中的无人机飞行过程中的稳定度高,折叠后的空间利用较为合理,提高了该无人机的便携程度以及飞行安全性。
5.本发明的目的可以通过以下技术方案实现:
6.一种无人机折叠臂,包括呈滑动套接状态的主臂和从臂,所述主臂上还设置有可转动的支撑脚,在所述主臂与所述从臂滑动套接的进程中,所述支撑脚能沿顺时针或逆时针方向发生相应地转动,所述从臂的首端还设置有可转动的折叠杆,所述折叠杆的端部设置有旋翼。
7.进一步在于,所述主臂呈六边型中空结构,且六个面中水平朝下的一面开设有滑行缺口并在所述滑行缺口的两侧均设置有条型凸起,所述条型凸起竖直朝下延伸以扩展所述滑行缺口的深度,所述支撑脚处于收纳状态时便平行设置于所述滑行缺口内。
8.进一步在于,所述支撑脚包括从动齿轮,所述滑行缺口靠近所述主臂开口的一端转动连接有所述从动齿轮,二者的连接处设置有扭转弹簧,所述从动齿轮外环壁的齿牙等角度设置于0-300
°
内,余下的环壁空间设置有连接杆的一端,所述连接杆的另一端连接有支脚。
9.进一步在于,所述连接杆与所述支脚的连接处采用凸台过渡结构。
10.进一步在于,所述主臂的内腔滑动套接有所述从臂,所述滑行缺口的内腔远离其开口的一端设置有电动推杆,所述电动推杆的输出端沿所述主臂的长度方向水平延伸并与所述从臂的尾端固连。
11.进一步在于,所述从臂呈六边型结构,其六个面中与所述滑行缺口相对的一面设置有主动齿条,所述主动齿条位于该面的尾端且其与所述从动齿轮相互啮合。
12.进一步在于,所述从臂的首端设置有匚型安装架,所述折叠杆与所述匚型安装架转动连接,二者的连接处设置有弹簧柱,且所述匚型安装架的内壁设置有卡块,所述折叠杆的环壁对应所述卡块的位置开设有与其活动卡接的卡槽。
13.一种无人机,包括无人机本体,多个所述无人机折叠臂关于所述无人机本体的竖直中心面镜像对称设置,且位于所述无人机本体首端的所述无人机折叠臂与尾端的所述无人机折叠臂高低错位,从而避免二者在相向折叠时发生抵触。
14.本发明的有益效果:
15.1、本发明中的无人机折叠臂能够根据不同环境的使用需求主动进行臂长的延伸与缩短,伸展的臂长能够提高无人机本体在飞行过程中的稳定性,避免其因为环境等因素在飞行时晃动甚至掉落,优化了无人机本体的飞行能力;
16.2、本发明中多个无人机折叠在无人机本体上的高度错位,以便在收纳时更加极致地利用空间,提高该无人机的便携程度,也能减少该无人机意外磕碰的几率;
17.3、该无人机的支撑脚能够在臂长伸展时自动收纳,臂长收缩时自动翻转伸出,减少在飞行过程中支撑脚与异物剐蹭的几率,提高飞行过程中的安全程度。
附图说明
18.下面结合附图对本发明作进一步的说明。
19.图1是本发明中无人机折叠臂的整体结构示意图;
20.图2是图1的俯视图;
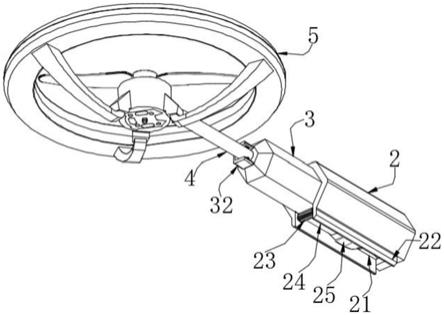
21.图3是图1的侧视图;
22.图4是本发明中无人机折叠臂的支脚撑起且从臂伸出后的结构示意图;
23.图5是本发明中支脚的结构示意图;
24.图6是本发明中折叠杆折叠后的结构示意图;
25.图7是图6中a处的局部放大图;
26.图8是本发明中从臂的结构示意图;
27.图9是本发明中无人机本体与折叠臂连接后的整体结构示意图。
28.图中:1、无人机本体;2、主臂;21、滑行缺口;22、条型凸起;23、从动齿轮;24、连接杆;25、支脚;26、电动推杆;3、从臂;31、主动齿条;32、匚型安装架;33、卡块;4、折叠杆;41、卡槽;5、旋翼。
具体实施方式
29.下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
30.如图1所示,一种无人机折叠臂,包括呈滑动套接状态的主臂2和从臂3,主臂2上还设置有可转动的支撑脚,在主臂2与从臂3滑动套接的进程中,支撑脚能沿顺时针或逆时针方向发生相应地转动,以实现支撑脚的撑起或收纳,从臂3的首端还设置有可转动的折叠杆4,折叠杆4的端部设置有旋翼5,当处于飞行状态时,从臂3自主臂2内部伸出,在伸出的过程中,支撑脚自动翻转收纳,减少在飞行过程中支撑脚与异物剐蹭的几率,并提高飞行过程中的安全程度,而当需要降落时,从臂3收缩,支撑脚自动翻转伸出,使无人机平稳降落在地面上,当需要携带无人机移动时,将折叠杆4转动对折,实现无人机的收纳,减少空间占用。
31.如图2和图3所示,主臂2呈六边型中空结构,从臂3也呈六边型结构,这使得从臂3伸出或收缩的过程中较为稳定,避免在此过程中出现晃动或偏移,且六个面中水平朝下的一面开设有滑行缺口21并在滑行缺口21的两侧均设置有条型凸起22,条型凸起22竖直朝下延伸以扩展滑行缺口21的深度,支撑脚处于收纳状态时便平行设置于滑行缺口21内,从而起到保护支撑脚以及便于收纳的目的。
32.如图5所示,支撑脚包括从动齿轮23,滑行缺口21靠近主臂2开口的一端转动连接有从动齿轮23,二者的连接处设置有扭转弹簧,从动齿轮23外环壁的齿牙等角度设置于0-300
°
内,余下的环壁空间设置有连接杆24的一端,连接杆24的另一端连接有支脚25,这样的齿牙设置能够实现在转动一定角度后,支脚25处于倾斜状态与水平地面抵接,从而保证无人机本体1降落时较为稳定。
33.支脚25的外部覆盖有尼龙防滑层,避免在停靠时,支脚25与地面产生的震动影响无人机本体1内部的零部件匹配度,保障该无人机的长久使用。
34.如图5所示,连接杆24与支脚25的连接处采用凸台过渡结构,这使连接杆24与支脚25连接的更加紧密,提高了二者的受力承受强度。
35.如图2所示,主臂2的内腔滑动套接有从臂3,滑行缺口21的内腔远离其开口的一端设置有电动推杆26,电动推杆26的输出端沿主臂2的长度方向水平延伸并与从臂3的尾端固连,通过控制电动推杆26的输出端,进而控制从臂3的伸出与收缩,从臂3位移过程中较为稳定可靠。
36.除使用电动推杆26外,还可使用伺服马达与螺杆结合的推进方式实现从臂3的延伸与缩短。
37.如图4和图8所示,从臂3呈六边型结构,其六个面中与滑行缺口21相对的一面设置有主动齿条31,主动齿条31位于该面的尾端且其与从动齿轮23相互啮合,当从臂3自主臂2内部滑出的初始阶段,从动齿轮23不会发生转动,从动齿轮23在扭转弹簧的作用下保持倾斜的稳定状态,当从臂3尾端的主动齿条31与从动齿轮23接触后,二者啮合,从动齿轮23发生转动,带动连接杆24与支脚25同步转动,当从臂3伸出至其极限距离后,连接杆24与支脚25转动并收纳入滑行缺口21内,反之同理,在从臂3收缩后,主动齿条31与从动齿轮23发生作用,使得连接杆24与支脚25克服扭转弹簧的扭力,二者处于倾斜状态,支撑无人机的降落。
38.如图6和图7所示,从臂3的首端设置有匚型安装架32,折叠杆4与匚型安装架32转动连接,二者的连接处设置有弹簧柱,如图8所示,且匚型安装架32的内壁设置有卡块33,折叠杆4的环壁对应卡块33的位置开设有与其活动卡接的卡槽41,当需要携带无人机时,手动折叠折叠杆4实现旋翼5的折叠,卡块33与卡槽41可以避免在无人机飞行过程中,即折叠杆4、从臂3以及主臂2处于同一线性状态时,折叠杆4发生晃动,使无人机飞行时较为稳定可靠。
39.如图9所示,一种无人机,包括无人机本体1,多个无人机折叠臂关于无人机本体1的竖直中心面镜像对称设置,且位于无人机本体1首端的无人机折叠臂与尾端的无人机折叠臂高低错位,从而避免二者在相向折叠时发生抵触,在折叠后,位于同一侧的两个折叠杆4相向设置,两个旋翼5上下交错并收纳于无人机本体1的一侧,无人机本体1的侧边还可设置磁吸区域或卡桩,用于活动卡接折叠杆4,避免旋翼5在收纳后因外力发生颤动或偏移。
40.同时由于位于无人机本体1首端与尾端的无人机折叠臂高低不同,因此支撑脚的高度也互不相同,实现不同位置的支撑脚在转动伸出后,支撑脚的下端处于同一平面,保证无人机本体1的稳定停滞。
41.本发明中的无人机折叠臂能够根据不同环境的使用需求主动进行臂长的延伸与缩短,伸展的臂长能够提高无人机本体1在飞行过程中的稳定性,避免其因为环境等因素在飞行时晃动甚至掉落,优化了本发明中无人机的飞行能力。
42.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
43.以上内容仅仅是对本发明所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离发明或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。