1.本发明涉及无人机技术领域,尤其涉及一种用于检测桥梁底部的无人机。
背景技术:
2.相比于传统桥梁检测方式,利用无人机技术对桥梁进行定期的检测和养护,可以避免封路或者封航等情况,同时避免利用贵重的设备从桥面或桥下经过进行复杂的检测,从而导致价格昂贵且存在检测死角的问题。
3.例如申请号为:cn201710047919.x的中国发明专利,名称为:用于远程桥梁检测的无人机,包括机座和桥梁检测系统,机座的两侧通过联轴器固定连接有机翼,机翼内固定安装有第一电机,第一电机的输出轴贯穿机翼并延伸至其外,机翼外固定连接有轴套,机翼外的第一电机的输出轴上固定连接有螺旋桨。本发明通过设置桥梁检测系统、红外摄像仪、超声波探伤仪、混凝土回弹仪和远程控制器,本发明结合现代的高科技无人机技术搭载桥梁检测装置,对桥梁进行远程遥控检测,无人机可以高效快速的定期检测桥梁安全状况,实现全方位高效的检测,无需人工现场检测。在本装置对桥梁进行无人检测的过程时,需要人工在远程进行实时操纵无人机进行飞行,以控制无人机飞过桥底对桥梁进行检测,由于桥底环境复杂且gps信号不稳定,实时远程操作过程中可能无法准确地控制无人机对桥梁的底部进行低空避障飞行,从而存在无法起到对桥梁底部进行准确检测的问题。
4.因此,亟需一种用于检测桥梁底部的无人机,解决现有技术中由于桥梁的底部环境复杂且gps信号不稳定难以实现无人机的低空巡线避障飞行,从而导致存在无法起到对桥梁底部进行准确检测的问题。
技术实现要素:
5.有鉴于此,有必要提供一种用于检测桥梁底部的无人机,解决现有技术中由于桥底环境复杂且gps信号不稳定难以实现无人机的低空巡线避障飞行,从而导致存在无法起到对桥梁底部进行准确检测的技术问题。
6.为达到上述技术目的,本发明的技术方案提供一种用于检测桥梁底部的无人机,包括:
7.无人机;
8.定位组件,所述定位组件连接于所述无人机,用于生成所述无人机的位置信号,并根据位置信号实现所述无人机沿预设定的飞行路径飞行;
9.图像采集件,所述图像采集件连接于所述无人机,用于收集所述无人机沿预设定的飞行路径上桥梁底部的图像或视频信息,以辅助完成对桥梁底部的检测工作。
10.进一步的,所述定位组件包括定位件和控制件,所述定位件连接于所述无人机,用于生成和发送所述无人机的位置信号,所述控制件连接于所述无人机,并与所述定位件进行通信连接,用于接收所述定位件的位置信号,以控制所述无人机完成桥梁底部的巡线避障飞行。
11.进一步的,所述定位件包括至少一个uwb移动站,所述uwb移动站连接于所述无人机,并与设置于待检测桥梁上的uwb基站进行通信连接,用于实现所述无人机的位置定位。
12.进一步的,所述定位件还包括毫米波雷达,所述毫米波雷达连接于所述无人机的机体的底部,并与所述控制件和所述uwb基站均进行通信连接,用于测量所述无人机的底部与地面之间的距离,并将测量的数据反馈至所述控制件。
13.进一步的,所述定位件还包括激光旋转雷达,所述激光旋转雷达连接于所述无人机的机体的顶部,并与所述控制件和所述uwb基站均进行通信连接,用于测量所述无人机的顶部与桥梁底部之间的距离,并将测量的数据反馈至所述控制件。
14.进一步的,所述定位组件还包括避障件,所述避障件包括四个避障雷达,四个所述避障雷达沿所述无人机的机体的周向设置,并连接于所述无人机的机体,四个所述避障雷达与所述控制件均相连接,用于实现所述无人机的周向避障巡飞。
15.进一步的,所述定位件还包括gps模块,所述gps模块连接于所述无人机的机体,并与所述控制件进行通信连接,用于实现所述无人机的定位。
16.进一步的,还包括电池,所述电池连接于所述无人机的机体,并与所述无人机、所述定位件及所述控制件均进行电连接。
17.进一步的,所述图像采集件包括摄像头,所述摄像头连接于所述无人机的机体,并与所述电池进行电连接,用于所述无人机沿预设定的飞行路径上飞行时收集图像或视频信息。
18.进一步的,还包括地面站,所述地面站与所述无人机、所述定位件、所述控制件及所述摄像头均进行通信连通,用于监控所述无人机、所述定位件、所述控制件及所述摄像头的运行数据。
19.与现有技术相比,本发明的有益效果包括:无人机上设置有用于生成无人机的位置信号的定位组件,用以实现无人机沿预设定的飞行路径飞行,以实现对桥梁底部环境的巡线避障飞行,同时无人机上还设置有用于收集沿预设定的飞行路径上桥梁底部的图像或视频信息的图像采集件,以辅助完成对桥梁底部的检测工作,这样的结构,通过在无人机和上设置定位组件实现桥梁底部的巡线避障飞行,解决现有技术中由于桥底环境复杂且gps信号不稳定难以实现无人机的低空巡线避障飞行,从而导致存在无法起到对桥梁底部进行准确检测的技术问题。
附图说明
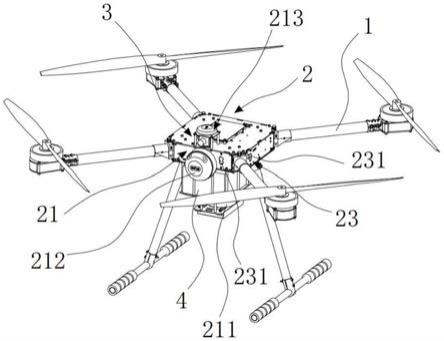
20.图1是本发明实施例所提供的一种用于检测桥梁底部的无人机的结构示意图;
21.图2是本发明实施例所提供的一种用于检测桥梁底部的无人机另一视角的结构示意图;
22.图3是本发明实施例所提供的控制件与无人机、定位件及地面站的连接关系示意图;
23.图4是本发明实施例所提供的一种用于检测桥梁底部的无人机的地面基站的结构示意图。
具体实施方式
24.下面结合附图来具体描述本发明的优选实施例,其中,附图构成本技术一部分,并与本发明的实施例一起用于阐释本发明的原理,并非用于限定本发明的范围。
25.请参阅图1、图4,本发明提供了一种用于检测桥梁底部的无人机,无人机1、定位组件2及图像采集件3,定位组件2连接于无人机1,用于生成无人机1的位置信号,并根据位置信号实现无人机1沿预设定的飞行路径飞行,图像采集件3连接于无人机1,用于收集无人机1沿预设定的飞行路径上桥梁底部的图像或视频信息,以辅助完成对桥梁底部的检测工作。
26.可以理解,无人机1上设置有用于生成无人机1的位置信号的定位组件2,用以实现无人机1沿预设定的飞行路径飞行,以实现对桥梁底部环境的巡线避障飞行,同时无人机1上还设置有用于收集沿预设定的飞行路径上桥梁底部的图像或视频信息的图像采集件3,以辅助完成对桥梁底部的检测工作。
27.本实施方式中,还包括至少一个用于配合定位组件实现无人机1的位置定位的uwb移动站、用于为无人机1、定位组件2及图像采集件3供电的电池4,以及用于对无人机1、定位组件2及图像采集件3进行实时监控的地面站5。
28.进一步地,本发明中无人机1采用本领域技术人员所公知的常规设置,此处不作过多阐述。
29.更进一步地,本发明中uwb移动站内置于无人机,多个uwb基站固定设置于待检测桥梁上,并与uwb移动站进行通信连接,uwb移动站接收来自多个uwb基站发射的无线信号,用于实现无人机1的位置定位。
30.还进一步地,uwb基站即超宽带基站的缩写,是一种无线载波通信技术,超宽带基站属于本领域技术人员所公知的常规设置,可以参考申请号为:cn201910257990.x的中国发明专利,名称为:一种用于桥梁检测的无人机自主定位系统及方法,此处不作过多的阐述。
31.如图1和图3所示,定位组件2包括定位件21和控制件22,定位件21连接于无人机1,用于生成和发送无人机1的位置信号,控制件22连接于无人机1,并与定位件21进行通信连接,用于接收定位件21的位置信号,以控制无人机1完成桥梁底部的巡线避障飞行。
32.可以理解,定位件21连接于无人机1,用于生成和发送无人机1的位置信号,控制件22内置于无人机1,用于根据定位件21、uwb移动站及uwb基站的通信信号,控制无人机1以完成低空巡线飞行。
33.其中,本发明中,控制件22为用于控制无人机1飞行的飞行控制器,且该飞行控制器设置于无人机1的内部,此处控制件22属于本领域技术人员所公知的常规设置,此处不作过多阐述。
34.进一步地,如图1所示,定位组件2还包括用于辅助无人机1完成低空巡线避障飞行的避障件23,避障件23连接于无人机,并与控制件22相连接。
35.如图1所示,定位件21包括毫米波雷达211,毫米波雷达211连接于无人机1的机体的底部,并与控制件22和uwb基站均进行通信连接,用于测量无人机1的底部与地面之间的距离,并将测量的数据反馈至控制件。
36.可以理解,本发明中通过毫米波雷达211与uwb基站及控制件2之间的通信连接,实现对无人机1的底部与地面之间的间距进行测量和监控,用以防止因地面的凹凸不平使得
无人机1与地面相撞,从而导致造成无法对桥梁底部进行准确检测。
37.进一步地,如图1所示,毫米波雷达211设置于无人机1的机体的底部,且其测量端相对远离无人机1的底部的最远端设置。
38.更进一步地,毫米波雷达211为本领域技术人员所公知的常规设置,此处不作过多阐述。
39.如图2所示,定位件21还包括激光旋转雷达212,激光旋转雷达212连接于无人机1的机体的顶部,并与控制件22和uwb基站均进行通信连接,用于测量无人机1的顶部与桥梁顶部之间的距离,并将测量的数据反馈至控制件22。
40.可以理解,本发明中通过激光旋转雷达212与uwb基站及控制件22之间的无线连接,实现对无人机1的顶部与桥梁底部之间的间距进行测量和监控,用以防止无人机1与桥梁底部相撞,从而导致造成无法对桥梁底部进行准确检测。
41.进一步地,如图1所示,激光旋转雷达212设置于无人机1的机体的前端,且其测量端相对远离无人机1的顶部的最远端设置。
42.更进一步地,激光旋转雷达212为本领域技术人员所公知的常规设置,此处不作过多阐述。
43.如图1所示,避障件23包括四个避障雷达231,四个避障雷达231沿无人机1的机体的周向设置,并连接于无人机1的机体。
44.可以理解,四个避障雷达231分别设置于无人机1基体的前端、后端、左侧以及右侧,用于检测无人机1周向障碍物的距离,以使得无人机1进行避障飞行。
45.进一步地,避障雷达231为本领域技术人员所公知的常规设置,此处不作过多阐述。
46.如图1所示,定位件21还包括gps模块213,gps模块213连接于无人机1的机体,用于实现无人机1的定位。
47.可以理解,gps模块213用于实现无人机1在非桥梁底部检测情况下的定位,即当无人机1在桥外其他gps信号良好的条件下的位置定位,如图1所示,gps模块213设置于无人机1机体的顶部,并通过支架连接于无人机1的机体。
48.进一步地,gps模块213为本领域技术人员所公知的常规设置,此处不作过多阐述。
49.其中,如图1所示,图像采集件3为摄像头,摄像头设置于无人机1的机体的前端,并连接于无人机1的机体的前端,用于无人机1沿预设定的飞行路径飞行时收集图像或视频信息,并将收集的数据进行实时的反馈,用于方便使用者根据手机的数据对桥梁底部进行检测和评估。
50.进一步地,本发明中摄像头采用本领域技术人员所公知的常规设置,此处不作过多阐述。
51.如图1、图2所示,电池4连接于无人机1的机体,并与无人机1、定位件21及图像采集件3均进行电连接。
52.可以理解,电池4与无人机1、毫米波雷达211、激光旋转雷达212、避障雷达231、gps模块213及摄像头均相连接,用于对无人机1、毫米波雷达211、激光旋转雷达212、避障雷达231、gps模块213及摄像头的正常工作供电,如图2所示,电池4设置于无人机1的机体的下方,并设置于无人机1和毫米波雷达211之间。
53.如图3所示,地面站5与无人机1、定位件21、控制件22及摄像头均进行通信连通,用于收集和监控无人机1、定位件21、控制件22及摄像头的运行数据。
54.可以理解,地面站5通过天线等通信设备与无人机1进行通信连接,用于收集和监控无人机1、定位件21、控制件22及摄像头的运行数据,以保障无人机1及检测工作的正常进行。
55.本发明的具体工作流程,无人机1上设置有用于生成和发送无人机1的位置信号的定位件21,定位件21与控制件22进行通信连接,用于接收和反馈定位件21的信号,用以实现无人机1沿预设定的飞行路径飞行,以实现对桥梁底部环境的避障飞行,同时无人机1上还设置有用于沿预设定的飞行路径对桥梁底部进行图像或视频的收集的图像采集件3,并将收集的图像或视频信号进行实时的反馈,以辅助完成桥梁底部的检测。
56.使用人员在使用时,在桥岸边选择开阔地带,作为无人机1的起飞地点;开启地面站5电源,打开遥控器,同时对桥底检测无人机1进行上电操作;待地面站5显示无人机1起飞状态正常,此时显示无人机1的定位信息采用的是gps模块213的定位模式;
57.待桥底检测无人机1完成自检,且正常后,解锁无人机1,此时飞机的高度控制利用毫米波雷达211进行“仿地”飞行,接近待检测桥桥底;当检测无人机1飞抵桥底时,检测无人机1进入到uwb定位模式,实现在uwb模式下的水平定位,同时检查地面站5显示无人机1状态是否进入uwb模式;
58.当无人机1在桥底实现水平定位后,在激光旋转雷达212的数据健康的前提下,高度方向的测距传感器由毫米波雷达211变为激光旋转雷达212,通过对激光旋转雷达212的数据进行处理能够消除不同板型对激光旋转雷达212的影响,输出无人机1距桥底的恒定距离值;
59.待无人机1在桥底的高度方向的回路控制稳定后,即可以基于激光旋转雷达212的输出值进行无人机1高度方向上的控制,使得桥底检测无人机1能够实现桥底“地形”的“仿地”飞行。
60.当桥底检测无人机1定点悬停状态稳定时,即可以切换为自动巡线飞行,飞行高度为距桥底3m。在桥底检测无人机1巡飞过程中,相机按照固定的间隔时间进行拍照,即可完成桥底图片数据的采集。
61.这样的结构,通过无人机1和控制件的配合,解决现有技术中由于桥底环境复杂且gps信号不稳定难以实现无人机1的低空巡线避障飞行,从而导致存在无法起到对桥梁底部进行准确检测的技术问题。
62.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。