1.本发明涉及一种配备子旋翼的无人机,更为详细地,涉及一种配备子旋翼的无人机,即使多个主旋翼中的一个或一部分主旋翼产生故障,也可以代替出故障的主旋翼并产生飞行驱动力,从而可不坠落并飞行。
背景技术:
2.无人机是飞行体的一种,可在任何时候任何地点起降且操作容易,比现有的飞行体便宜,可轻量化,从而在节目拍摄、灾难灾害监测、物流运输、山火灭火等多种领域使用。
3.通常无人机作为配备多个旋翼(rotor)的多旋翼型飞行体,具有比具备一个旋翼的旋翼飞机更加稳定、安全的优点,此外,优点在于,由于是以马达为基础而不是发动机,因此控制性能优秀且相对噪音小。
4.但是,由于这样的无人机使用多个旋翼,因此产生有故障的旋翼的几率相对高,如果多个旋翼中一个出故障,则会产生无人机的飞行驱动力变得不足或无人机的推进力不均衡,从而可能会成为坠落的原因。此外,存在如下问题,即使一个或一部分旋翼发生故障时不坠落,其他正常的旋翼产生追加飞行驱动力或为了实现气体的均衡而需要放出过度的功率,由此其他的旋翼产生过热及老化现象,从而使得无人机的寿命缩短。
5.先行技术文献
6.专利文献
7.(专利文献0001)韩国登记专利第10-2101636号
技术实现要素:
8.本发明用于解决上面提及的现有技术具备的问题,本发明要实现的目的在于,提供一种配备子旋翼的无人机,即使多个主旋翼中的一个或一部分主旋翼产生故障,也可以代替出故障的主旋翼并产生飞行驱动力,从而可不坠落并飞行。
9.本发明要实现的另一个目的在于,提供一种配备子旋翼的无人机,使得子旋翼在出故障的主旋翼上侧或下侧产生飞行驱动力,即使一个或一部分的主旋翼产生故障也可在飞行中实现平衡。
10.本发明要实现的另一个目的在于,提供一种配备子旋翼的无人机,在子旋翼位于出故障的主旋翼的上侧或下侧的时候,多个子旋翼以向一侧聚集的形式配置,防止可能产生的无人机自重的不平衡现象。
11.根据本发明的一个实施例的配备子旋翼的无人机,包括:无人机本体;多个主旋翼,其产生使得无人机本体飞行的飞行驱动力;一个以上的子旋翼,其代替主旋翼并产生飞行驱动力;故障感知部,其感知主旋翼的故障;以及控制部,其对子旋翼进行驱动控制,以便如果感知到主旋翼的故障,则代替出故障的主旋翼而产生飞行驱动力。
12.此时,在子旋翼位于出故障的主旋翼的上侧或下侧的状态下,可代替主旋翼并产生飞行驱动力。
13.此外,无人机还包括一个以上的连接框架,其使得各个子旋翼以位于和主旋翼不同的高度的形式被支撑地连接于无人机本体,连接框架可旋转地结合于无人机本体,通过控制部的旋转驱动控制而旋转,从而可使得子旋翼的配置位置旋转移动。
14.此外,配备多个子旋翼及连接框架的情况,连接框架和其他的连接框架之间的旋转区域可不重叠。
15.此外,控制部可包括:选择部,如果感知到主旋翼的故障,则在等待中的子旋翼中选择与出故障的主旋翼最近的子旋翼;旋转角计算部,其计算连接框架的旋转角,所述连接框架用于使得选择的子旋翼位于出故障的主旋翼的上侧或下侧;旋转驱动部,其根据算出的旋转角,对连接框架进行旋转驱动控制;以及子旋翼驱动部,其对选择的子旋翼进行驱动控制。
16.此外,如果某一个子旋翼位于出故障的主旋翼上侧或下侧的第一位置,则控制部可对连接框架进行旋转驱动控制,以便使得另一个子旋翼以无人机本体为中心位于第一位置的相反方向。
17.此外,故障感知部可包括:感知传感器,其感知各个主旋翼的螺旋桨旋转数;故障判断部,其判断感知到的螺旋桨旋转数超过正常范围的主旋翼有故障。
18.根据本发明,如果感知到主旋翼的故障,则子旋翼代替主旋翼并产生飞行驱动力,即使飞行中的无人机上一个或一部分主旋翼产生故障,通过子旋翼的飞行驱动力也可以不坠落并持续飞行。
19.此外,本发明中,子旋翼配置于主旋翼的上侧或下侧并产生飞行驱动力,即使一个或一部分主旋翼产生故障也可以产生平衡的推进力。
20.此外,如果子旋翼位于出故障的主旋翼上侧或下侧,则另一个子旋翼以无人机本体为中心位于与之相反的位置,从而可防止由于子旋翼聚集地配置在一侧而可能产生的无人机自重的不平衡现象。
附图说明
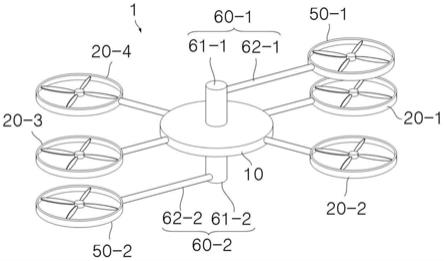
21.图1是概念地示出根据本发明的一个实施例的配备子旋翼的无人机的图。
22.图2是根据本发明的一个实施例的无人机的功能模块图。
23.图3是根据本发明的一个实施例的感知部的功能模块图。
24.图4是概念地示出在侧面看根据本发明的一个实施例的无人机的模样的图。
25.图5是根据本发明的一个实施例的控制部的功能模块图。
26.图6(a)至图7是示出根据本发明的一个实施例的子旋翼及连接框架的驱动例示的图。
27.标号说明
28.10:无人机本体
29.20:主旋翼
30.30:故障感知部
31.31:旋转数感知部
32.32:故障判断部
33.40:控制部
34.41:选择部
35.42:旋转角计算部
36.43:旋转驱动部
37.44:子旋翼驱动部
38.50:子旋翼
39.60:连接框架
40.61:旋转框架
41.62:水平框架
具体实施方式
42.以下,参照附图对本发明的优选实施例进行详细地说明。首先就对各附图的构成要素附加参照标号而言,应留意的是,对于相同的构成要素即使在其他图上标记也尽可能具有相同的标号。此外,就说明本发明而言,对于相关公知构成或功能的具体说明,在判断为可能会混淆本发明的要旨的情况下,省略其详细的说明。
43.图1是概念地示出根据本发明的一个实施例的配备子旋翼的无人机的图,图2是根据本发明的一个实施例的无人机的功能模块图,图3是根据本发明的一个实施例的感知部的功能模块图,图4是概念地示出在侧面看根据本发明的一个实施例的无人机的模样的图。
44.根据本实施例的配备子旋翼的无人机(以下,称作“无人机”)特征在于,即使多个主旋翼20中的一个或一部分主旋翼20产生故障,也可以代替出故障的主旋翼20并产生飞行驱动力,从而可不坠落并飞行,并且,即使一个或一部分的主旋翼20产生故障也可在飞行中实现平衡。
45.为此,根据本实施例的无人机1可包括无人机本体10、主旋翼20、故障感知部30、控制部40、子旋翼50以及连接框架60。
46.参照图1,配备有多个主旋翼20,其与无人机本体10结合并产生驱动力,以便可使得无人机本体10飞行。图1中示出了配备4个主旋翼20-1、20-2、20-3、20-4的4轴无人机,但不限定于此,根据需要可变更主旋翼20的个数。以下为了说明的便利上,以配备4个主旋翼20的4轴无人机为例进行说明。
47.参照图2,故障感知部30感知各个主旋翼20的故障与否,如果感知到主旋翼20的故障则生成故障信号,并将生成的故障信号传送至控制部40。
48.参照图3,对故障感知部30进行更具体的说明,故障感知部30可包括旋转数感知部31和故障判断部32而构成。此时,旋转数感知部31配备有多个,分别配置于各个主旋翼20,从而可感知到各个主旋翼20的螺旋桨旋转数。此时,旋转数感知部31可通过霍尔传感器实现,但不限定于此。
49.旋转数感知部31感知到的螺旋桨旋转数信息被传送至故障判断部32,故障判断部32对感知到的螺旋桨旋转数是否为正常范围内的旋转数进行判断,从而可判断各个主旋翼20的故障与否。如果感知到螺旋桨旋转数脱离正常范围的主旋翼20,则故障判断部32判断该主旋翼20有故障,生成对此的故障信号并传送至控制部40。
50.回到图3,如果控制部40从故障判断部32接收故障信号,则对子旋翼50进行驱动控制,以便代替主旋翼20并产生飞行驱动力,即使在飞行中的无人机1上一个或一部分主旋翼
20产生故障,也可以通过子旋翼50产生充分的飞行驱动力,从而可以不坠落并持续飞行。
51.此外,子旋翼50通过连接框架60以可移动的形式与无人机本体10连接,控制部40控制连接框架60,以便使得子旋翼50在出故障的主旋翼20的上侧或下侧产生飞行驱动力,即使一个或一部分主旋翼产生故障也可以产生平衡的推进力,在后面参照图5至图7对于包括这些的控制部40的更具体的说明进行叙述。
52.再次参照图1,虽然子旋翼50与主旋翼20以相同的形式构成,但与主旋翼20不同地,不是在无人机飞行时必须运转,而是可根据需要运转。具体地,当无人机需要高速飞行或无人机为了提起沉重的货物而需要追加飞行驱动力的时候,运转子旋翼50,从而可产生追加飞行驱动力,优选地,当感知到主旋翼20的故障时,通过控制部40的控制而运转子旋翼50,从而代替出故障的主旋翼20并产生驱动力。子旋翼50可配备多个,根据需要也可只配备一个。本实施例中以如下情况为例进行说明:子旋翼50以无人机本体10为基准在上下侧各配备一个,共配备两个。
53.子旋翼50通过连接框架60以可被支撑的形式连接于无人机本体10。具体地,子旋翼50以位于和主旋翼20不同的高度的形式结合于连接框架60,连接框架60以可旋转的形式结合于无人机本体10,通过控制部40的旋转驱动控制而旋转,从而可使得子旋翼50的配置位置旋转移动。此时,连接框架60可根据子旋翼50的个数而配备多个,各个连接框架60通过控制部40分别被控制,从而可在互相间独立地分别旋转。
54.参照图4更为详细地说明,连接框架60构成为包括旋转框架61和水平框架62。
55.旋转框架61以可旋转的形式结合于无人机本体10的上侧或下侧,可从无人机本体10向上或向下凸出地配置。并且,旋转框架61可根据控制部40的旋转驱动控制而旋转。水平框架62沿水平方向连接旋转框架61和子旋翼50,以便使得子旋翼50根据旋转框架61的旋转进行旋转移动。此时,水平框架60具有规定的长度,以便可使得子旋翼50位于主旋翼20的上侧或下侧,水平框架60以从无人机本体10隔开规定距离的状态与旋转框架61结合,以便以使得子旋翼50从主旋翼20向上侧或下侧隔开规定距离l1、l2的形式配置。根据这样的旋转框架61的构成,随着旋转框架61旋转,子旋翼50的配置位置在多个主旋翼20上侧或下侧旋转移动。
56.图5是根据本发明的一个实施例的控制部的功能模块图,图6(a)至图7是示出根据本发明的一个实施例的子旋翼及连接框架的驱动例示的图。
57.如上所述,如果控制部40从故障判断部32接收故障信号,则对子旋翼50进行驱动控制,以便代替出故障的主旋翼20并产生飞行驱动力,此外,对连接框架60进行旋转驱动控制,从而使得子旋翼50在位于出故障的主旋翼20的上侧或下侧的状态下产生飞行驱动力。
58.参照图5,控制部40可包括选择部41、旋转角计算部42、旋转驱动部43以及子旋翼驱动部44。
59.如果选择部41感知到主旋翼20的故障,则可在等待中的子旋翼50中选择与出故障的主旋翼20最近的子旋翼50。优选地,选择部41以子旋翼50的最初设定位置为基准,考虑到子旋翼50从最初设定位置旋转移动的旋转移动角,可以判断各个子旋翼50的现在位置。
60.此时,配备多个子旋翼50及连接框架60的情况,连接框架60和其他的连接框架60之间的旋转区域不重叠,可以确定各个子旋翼50负责代替的主旋翼20,此时,如果感知到主旋翼20的故障,则选择部40可选择负责代替出故障的主旋翼20的子旋翼50。如果,在根据本
实施例的无人机1配备一个子旋翼50的情况,可省略控制部40的选择部41。
61.旋转角计算部42算出连接框架60的旋转角,所述连接框架60用于使得选择的子旋翼50位于出故障的主旋翼20的上侧或下侧,旋转驱动部43根据算出的旋转角,对连接框架60进行旋转驱动控制,从而使得选择的子旋翼50位于出故障的主旋翼20的上侧或下侧。并且,如果选择的子旋翼50位于主旋翼20的上侧或下侧,则子旋翼驱动部44对子旋翼50进行驱动控制,从而子旋翼50代替出故障的主旋翼20并产生飞行驱动力。
62.以图6a及图6b为例进行说明,如果选择部41从故障感知部30接收对于2号主旋翼20-2的故障信号,则可选择与2号主旋翼20-2相对接近地配置的上侧的子旋翼50-1。如果选择子旋翼50-1,则旋转角计算部42算出连接框架60的旋转角,连接框架60用于使得选择的子旋翼50-1位于出故障的主旋翼20-2的上侧或下侧,旋转驱动部43根据算出的旋转角,对连接框架60进行旋转驱动控制,如图6b所示,使得选择的子旋翼50-1位于出故障的主旋翼20-2的上侧或下侧。并且,子旋翼驱动部44对选择的子旋翼50-1进行驱动控制,从而子旋翼50-1代替出故障的主旋翼20并产生飞行驱动力。
63.如上所述,控制部40可分别控制各个连接框架60,以便分别配置各个子旋翼50位置,优选地,如果某一个子旋翼50位于出故障的主旋翼20上侧或下侧的第一位置,则控制部40可对连接框架60进行旋转驱动控制,以便使得另一个子旋翼50以无人机本体10为中心位于第一位置的相反方向。
64.以图7为例进行具体说明,如果某一个子旋翼50-1以位于出故障的主旋翼20-2上侧或下侧的第一位置的状态代替出故障的主旋翼20-2并产生飞行驱动力,则选择部41选择剩下的一个(或另一个)子旋翼50-2,旋转角计算部42算出连接框架60的旋转角,连接框架60使得选择的子旋翼50-2以无人机本体10为中心位于与第一位置相反的第二位置,旋转驱动部43根据算出的旋转角,对连接框架60进行旋转驱动控制,从而可使得剩下一个子旋翼50-2位于第二位置。此时,不驱动位于第二位置的子旋翼50-2,这样使得子旋翼50-2位于第二位置的理由是当某一个子旋翼50-1位于第一位置时,防止由于多个子旋翼50聚集配置而可能产生的无人机自重的不平衡现象。
65.如果包括两个以上子旋翼50的情况,优选地,控制部40使得各个子旋翼50间的隔开距离均匀,从而无人机自重可始终实现平衡。更具体地,控制部40使得各个子旋翼50互相间形成的角度均匀,从而无人机自重可始终实现平衡,例如,配备3个子旋翼50的情况,以子旋翼50间形成120度的角度的形式配置,可使得互相间的隔开距离均匀,配备4个子旋翼50的情况,子旋翼50间形成90度的角度,从而可使得互相间的隔开距离均匀。
66.并且,虽然图中未示出,但在连接框架60配备有平衡锤,其以旋转框架61为基准向水平框架62相反方向凸出配置,即使没有上述的另外的控制,无人机自重也可以始终实现平衡。
67.以上的说明仅仅是例示地说明本发明的技术思想,本发明所属的技术领域中具有一般知识的人员在不脱离本发明的本质特性的范围内可进行多种修改及变形。因此本发明中公开的实施例不是为了限定本发明的技术思想而是为了说明,本发明的技术思想的范围不受这样的实施例的限定。本发明的保护范围应根据下面的权利要求书而解释,应解释为与其同等范围内的所有技术思想包括在本发明的权利范围。