1.本发明涉及高压输配电领域,具体为一种基于无人机的自动拆装间隔棒方法。
背景技术:
2.为了保证分裂导线间距保持不变以满足电气性能,及防治在发生短路情况下,导线约束间不致产生电磁力而造成相互吸引碰撞,因而在档距中相隔一定距离安装间隔棒。
3.在高压输电线路中,更换间隔棒是常见的检修项目之一,其作业的关键在于如何快速拆装间隔棒。目前,间隔棒拆装处在人工拆装的水平,传统的拆装工具结构较为复杂,存在笨重、安装繁琐等缺点,且人工拆装存在一定危险性,且效率较低。
技术实现要素:
4.基于此,本发明的目的是提供一种基于无人机的自动拆装间隔棒方法,以解决现拆装间隔棒中依赖人力、操作复杂、工作强度大、作业风险高、效率低问题。
5.为实现上述目的,本发明提供如下技术方案:一种基于无人机的自动拆装间隔棒方法,包括以下步骤:
6.步骤一:无人机通过携带的超声波传感器、气压计、gps模块等传感器,来获知自身的位置信息,在预设的位置上进行悬停;
7.步骤二:无人机搭载自动拆装间隔棒模块,在预设的位置上采用验电模块检验高压线缆是否断电,保证断电后再进行新间隔棒的安装操作;
8.步骤三:无人机重新定位,采用视觉检测算法,检测旧间隔棒零件的种类和精确位置,将数据传送给自动更换间隔棒控制模块,进行旧间隔棒的拆卸操作。
9.进一步的,图像采集模块包含采集视频信息的摄像头和存储视频信息的存储模块;有效区域识别模块通过图像识别来识别预设的位置,并把这些区域作为定点悬停有效区域发送到控制参数计算模块。
10.进一步的,控制参数模块根据传感器提供的无人机姿态计算出无人机定点悬停所需的控制加速度,数据接收模块的作用是接收运算结果,来实时操控无人机的飞行。
11.进一步的,无人机下方设置有悬挂梁,悬挂梁与自动拆卸模块的卡钩卡紧,卡钩顶部具有90
°
的折弯,与悬挂梁的顶部端面平行。
12.进一步的,验电模块包括非接触式验电和接触式验电,非接触式验电在不需要距离导线太近的位置进行第一次验电,接触式验电在接触电缆的位置进行第二次验电。
13.进一步的,视觉检测算法用于检测间隔棒的种类和位置,对拍摄的图片中零件腐蚀膨胀情况进行预处理,然后通过边缘检测得零件的完整边缘轮廓,对零件边缘轮廓图像使用方向梯度直方图构造训练数据,并采用支持向量机在训练数据上训练分类识别模型,最后进行检测。
14.进一步的,采用的无人机为多旋翼无人机。
15.进一步的,无人机底部设置有兜网机构,用于防止意外高空坠物包括新、旧间隔棒
组件、机器人自身零件。
16.进一步的,视频校验保证拆装过程中的精确操作,并通过摄像头拍摄具体操作过程,将采集到的图片数据保存到数据库中,摄像头拍摄速度与无人机飞行速度相适应。
17.进一步的,数据库中用于记录无人机飞行、更换间隔棒过程的图像以及控制面板的操作动作,形成工作日志,以实现每个操作过程的追溯性。
18.综上所述,本发明主要具有以下有益效果:
19.(1)采用无人机搭载自动拆装间隔棒模块,无需操作人员高空操作,可通过远程操控终端来辅助间隔棒的自动拆装,保证了操作人员的安全性,可操作空间更灵活。
20.(2)采用自动拆装间隔棒模块,通过远程操作终端实现新间隔棒的安装和旧间隔棒的拆卸,与传统的人工拆装间隔棒的方式,能够更高效、快速、安全地实现间隔棒的自动化拆装过程。
21.(3)在间隔棒的拆装过程中,通过摄像头来远程辅助各个定位、校验环节,对出现的偏差可及时在远程终端调节,使得自动拆装间隔棒模块的动作更加精确,工作效率高。
附图说明
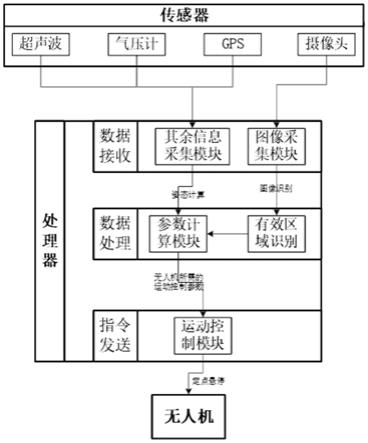
22.图1为本发明无人机定点悬停功能系统模块图;
23.图2为本发明的流程框图。
具体实施方式
24.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
25.下面根据本发明的附图,对其实施例进行说明。
26.本实施方式所述一种基于无人机的自动拆装间隔棒方法,该方法包括以下步骤:
27.步骤一:本步骤实现的是图1所示的无人机定点悬停功能。
28.无人机通过携带的超声波传感器、气压计、gps模块等传感器,来获知自身的位置信息,在预设的位置上进行悬停。通过超声波传感器和气压计来测量无人机的高度位置,gps模块来获知无人机的水平位置,远程调控无人机的位置,在预设的位置上悬停,进行下一步操作。
29.无人机悬停系统包括图像采集模块、有效区域识别模块、控制参数计算模块和数据接收模块。图像采集模块包含采集视频信息的摄像头和存储视频信息的存储模块;有效区域识别模块通过图像识别来识别预设的位置,并把这些区域作为定点悬停有效区域发送到控制参数计算模块;控制参数模块根据传感器提供的无人机姿态计算出无人机定点悬停所需的控制加速度,数据接收模块的作用是接收运算结果,来实时操控无人机的飞行。
30.采用的无人机为多旋翼无人机,具有足够的负载能力和较低的控制延时。
31.预设位置设置在待拆除间隔棒的附近,预设的安装位置对电网的正常运行不产生影响。
32.步骤二:无人机搭载自动拆装间隔棒模块,在预设的位置上采用验电模块检验高压线缆是否断电,保证断电后再进行新间隔棒的安装操作。
33.在无人机上搭载自动更换间隔棒装置的方法为:无人机下方设置有悬挂梁,悬挂梁与自动拆卸模块的卡钩卡紧,卡钩顶部具有90
°
的折弯,与悬挂梁的顶部端面平行。
34.验电模块包括非接触式验电和接触式验电。非接触式验电在不需要距离导线太近的位置进行第一次验电,接触式验电在接触电缆的位置进行第二次验电,确保高压线缆处于断电状态。
35.步骤三:无人机重新定位,采用视觉检测算法,检测旧间隔棒零件的种类和精确位置,将数据传送给自动更换间隔棒控制模块,进行旧间隔棒的拆卸操作。
36.视觉检测算法用于检测间隔棒的种类和位置。首先对拍摄的图片中零件腐蚀膨胀情况进行预处理,然后通过边缘检测得零件的完整边缘轮廓,对零件边缘轮廓图像使用方向梯度直方图(hog)构造训练数据,并采用支持向量机(svm)在训练数据上训练分类识别模型,最后进行检测。根据检测结果获得图像中零件的种类和位置信息。
37.步骤一至步骤三过程中,兜网机构位于无人机底部,用于防止意外高空坠物包括新、旧间隔棒组件、机器人自身零件等。
38.步骤二至步骤三过程中,通过视频校验保证拆装过程中的精确操作,并通过摄像头拍摄具体操作过程,将采集到的图片数据保存到数据库中。
39.摄像头拍摄速度与无人机飞行速度相适应。
40.无人机飞行稳定以保证拍摄图像清晰稳定。
41.视频校验用于微调操作过程中的偏差。根据各个摄像头拍摄的视频,通过远程终端对现场偏差强制纠偏。
42.数据库中用于记录无人机飞行、更换间隔棒过程的图像以及控制面板的操作动作,形成工作日志,以实现每个操作过程的追溯性。
43.尽管已经示出和描述了本发明的实施例,但本具体实施例仅仅是对本发明的解释,其并不是对发明的限制,描述的具体特征、结构、材料或者特点可以在任何一个或多个实施例或示例中以合适的方式结合,本领域技术人员在阅读完本说明书后可在不脱离本发明的原理和宗旨的情况下,可以根据需要对实施例做出没有创造性贡献的修改、替换和变型等,但只要在本发明的权利要求范围内都受到专利法的保护。