1.本发明属于技术领域,具体涉及一种两栖无人机机翼。
背景技术:
2.无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器。无人机实际上是无人驾驶飞行器的统称,现有技术存在的问题:现有的在水空两栖无人机中,大多采用于与空气中相同的数控驱动,这种驱动方式,不便于在水中长时间工作,由于现有的水空两栖无人机的旋翼朝向向上,无法对水空两栖无人机施加一个恒定的驱动力,且对无人的横向移动的能量利用率低,同时现有的水空两栖无人机,在转向过程中受到水的阻力,转向时间较长。
技术实现要素:
3.本发明的目的是提供一种两栖无人机机翼,能够实现,调整无人的旋翼方向,同时能够通过约束旋翼带动的水流,辅助水空两栖无人机的转向。
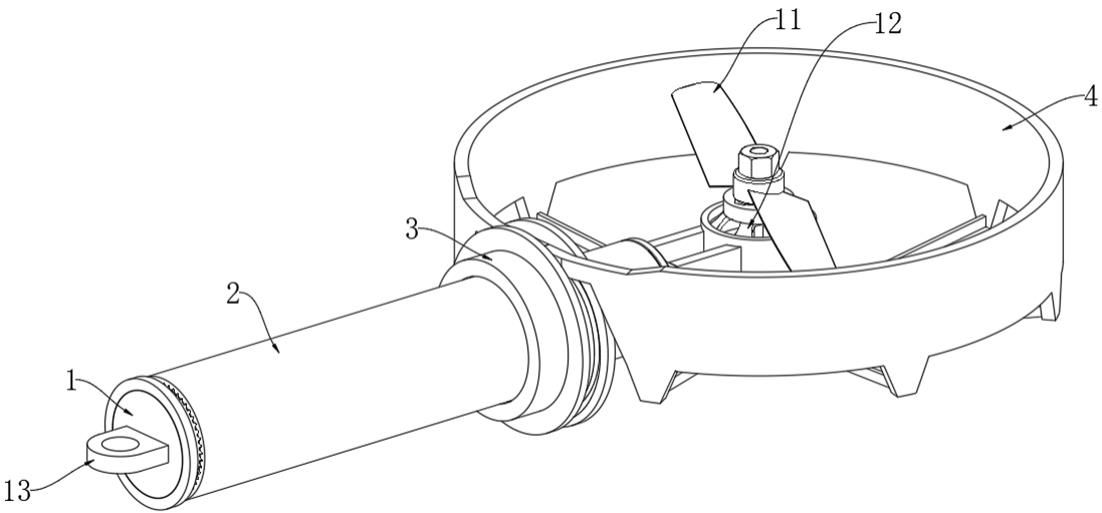
4.本发明采取的技术方案具体如下:一种两栖无人机机翼,包括圆形机翼杆,所述圆形机翼杆的一端转动连接有旋翼转动圆环,所述圆形机翼杆的内部设置有旋翼转向驱动装置,所述旋翼转动圆环的轴心处固定连接有旋翼转向导向装置,所述旋翼转向导向装置与旋翼转向驱动装置的一端传动连接,所述旋翼转动圆环的一端固定连接有连接板,所述连接板的一端固定连接有电机安装台,所述电机安装台的内部设置有防水电机,所述防水电机的传动端传动连接有无人机旋翼,所述电机安装台的一端中部固定连接有球形铰接台,所述电机安装台的外侧设置有旋翼防护及束流装置,所述旋翼防护及束流装置与球形铰接台铰接,所述圆形机翼杆靠近电机安装台的一端开设有多个透水孔,所述圆形机翼杆远离电机安装台的一端固定连接有用于与无人机连接的无人机连接台。
5.优选的,还包括无人机转向传动装置,所述无人机转向传动装置转动连接在圆形机翼杆的外壁,所述圆形机翼杆的外壁转动连接有无人机转向调整装置,所述圆形机翼杆的另一端内部设置有无人机转动驱动装置,所述无人机转动驱动装置与无人机转向传动装置传动连接,所述旋翼防护及束流装置的远离电机安装台的一侧可移动式连接在无人机转向调整装置内。
6.优选的,所述旋翼转向驱动装置包括储压椭圆管,所述储压椭圆管固定连接在圆形机翼杆的内壁,所述储压椭圆管内滑动连接有椭圆柱滑块,所述椭圆柱滑块的环侧设置有橡胶密封圈,所述储压椭圆管靠近电机安装台的一端的轴心处固定连接有圆柱推杆,所述圆柱推杆的靠近电机安装台的一端固定连接有四个等距分布的限位块三,所述限位块三远离电机安装台的一侧设置有半球形块,所述半球形块的固定连接在圆柱推杆的外壁,且所述半球形块的数量为四个,并阵列分布,所述半球形块与限位块三的数量与位置相对应。
7.优选的,所述旋翼转向导向装置包括圆柱筒二,所述圆柱筒二固定连接在旋翼转
动圆环的轴心处,所述圆柱筒二靠近电机安装台的一侧内壁开设有阵列分布的四个半圆形槽,所述圆柱筒二远离电机安装台的一侧内壁开设有阵列分布的四个半圆形槽二,所述半圆形槽与半圆形槽二的数量与位置一一对应,且半圆形槽与半圆形槽二的数量与半球形块的数量相同,所述半圆形槽与半圆形槽二通过连接槽相互连通,所述半圆形槽与半圆形槽二逐一交错式连通,使连接槽呈螺旋状,所述半球形块卡接在半圆形槽内。
8.优选的,所述储压椭圆管远离椭圆柱滑块的一侧设置有限位台一,所述限位台一固定连接在储压椭圆管的内壁,所述储压椭圆管的开口处固定连接有限位台二,所述限位块三的为“胶囊”状。
9.优选的,所述半圆形槽的长度小于半圆形槽二的长度。
10.优选的,所述旋翼防护及束流装置包括球形铰接头、圆柱环套,所述球形铰接头铰接在球形铰接台的外壁,所述球形铰接头的外壁等距分布有多个连接杆,所述圆柱环套套接在的电机安装台的外侧,且圆柱环套的轴心线与电机安装台的轴心线同线,所述圆柱环套的一侧与连接杆的一端固定连接,所述圆柱环套靠近无人机转向传动装置的一端开设有凸形槽,所述圆柱环套靠近无人机转向传动装置的一侧设置有方形连接块,所述方形连接块与圆柱环套的相邻端设置有铰接圆台,且与圆柱环套铰接,所述方形连接块的中部滑动插接有圆柱杆,所述圆柱杆的长度大于方形连接块宽度,所述圆柱杆卡接在无人机转向调整装置内。
11.优选的,所述无人机转向调整装置包括圆柱套筒二,所述圆柱套筒二转动连接在圆形机翼杆的外壁,所述圆柱套筒二的两端固定连接有对称设置的圆环板一,所述圆环板一远离电机安装台的一侧固定连接有圆柱筒,所述圆柱筒靠近圆形机翼杆的一侧开设有圆环槽一,所述圆环槽一的不相邻的两侧固定连接有阵列分布,且首尾相连的三角柱二。
12.优选的,所述圆环板一的相邻面开设有环形槽,所述环形槽的一端连通有导向槽二,所述环形槽的另一端连通有导向槽一,所述环形槽的圆心位于圆环板一的轴心线上,所述圆柱杆在常态下卡接在环形槽内,所述导向槽二由靠近环形槽一端至另一端,距环形槽的圆心间距降低,所述导向槽一由靠近环形槽一端至另一端,距环形槽的圆心间距增加。
13.优选的,所述无人机转向传动装置包括包括圆柱套筒一,所述圆柱套筒一转动连接在圆形机翼杆的外壁,所述圆柱套筒一远离电机安装台的一端固定连接有内啮合齿轮,所述内啮合齿轮内开设有多个等距分布的仿齿形环槽,所述圆柱套筒一靠近电机安装台的一端外壁固定连接有圆环一,所述圆环一不相邻的两端设置有阵列分布的三角柱,且所述三角柱首尾相连,所述圆环一卡接在圆环槽一内,所述三角柱在常态下不与三角柱二接触。
14.优选的,所述无人机转动驱动装置包括防水电机二,所述无人机转向传动装置的内壁远离电机安装台的一端与防水电机二外壁固定连接,所述防水电机二的传动端侧设置有齿轮一,所述防水电机二的传动端与齿轮一传动连接,所述齿轮一远离电机安装台的一侧设置有蜗杆,所述齿轮一的一侧传动连接有齿轮二,所述齿轮二转动连接在无人机转向传动装置上开设的方形孔一内,所述齿轮二与内啮合齿轮传动连接,所述蜗杆的一侧传动连接有蜗轮,所述蜗轮转动连接在方形孔二内,所述蜗轮与仿齿形环槽传动连接。
15.优选的,所述蜗杆的轴心处通过键可滑动式传动连接有传动轴,所述传动轴与防水电机二的传动端接触面设置相互契合的传动卡扣,所述传动轴的远离防水电机二的一端设置有弹簧,所述弹簧的远离防水电机二的一端贴合在圆形机翼杆的内壁。
16.本发明取得的技术效果为:本发明,通过无人机整体的在水中的下沉,使得水中的水通过透水孔流入圆形机翼杆内,并将水压直接作用在椭圆柱滑块的一侧,随之无人机整体的下沉,椭圆柱滑块一侧受到的水压,大于储压椭圆管内部气压,使得圆柱推杆带动半球形块朝向远离电机安装台的一侧移动,并经过半圆形槽与连接槽的导向带动旋翼转动圆环整体转动九十度,由此达到调整无人的旋翼朝向,使得旋翼更加高效的对无人机整体施加驱动力,同时当无人机上浮至空气中时,储压椭圆管内部的气压大于外界气压,同上原理,无人机机翼复位,调整至空中飞行状态,调整方式无需人为控制,更加快捷有效本发明,通过驱动防水电机二带动齿轮一转动,进而经过齿轮二带动无人机转向传动装置转动,通过防水电机二带动传动轴,达到带动蜗杆转动,进而经过蜗轮带动无人机转向传动装置在圆形机翼杆表面滑移,使得三角柱二能够与三角柱契合,并通过无人机转向传动装置带动无人机转向调整装置转动,由于圆柱杆受到无人机转向调整装置上的环形槽、导向槽一、导向槽二的导向,由此使得旋翼防护及束流装置能够围绕球形铰接台进行一定角度的摆动,达到使旋翼防护及束流装置对防水电机带动的水流进行控制,起到复制无人机转向的目的。
附图说明
17.图1是本发明的实施例所提供的结构示意图;图2是本发明的实施例所提供的图1的俯视图;图3是本发明的实施例所提供的图2的a-a截面图;图4是本发明的实施例所提供的图3的b区放大图;图5是本发明的实施例所提供的图1的半剖示意图;图6是本发明的实施例所提供的图5的e区放大图;图7是本发明的实施例所提供的图5的旋翼转向导向装置7示意图;图8是本发明的实施例所提供的图1的旋翼防护及束流装置4示意图。
18.图9是本发明的实施例所提供的图5的c区放大图;图10是本发明的实施例所提供的无人机转向调整装置3截面示意图;图11是本发明的实施例所提供的图5的无人机转向传动装置2示意图;图12是本发明的实施例所提供的图5的d区放大图;图13是本发明的实施例所提供的图5的d区放大图。
19.附图中,各标号所代表的部件列表如下:1、圆形机翼杆;11、无人机旋翼;12、防水电机;13、无人机连接台;14、球形铰接台;15、旋翼转动圆环;16、连接板;17、电机安装台;18、透水孔;19、方形孔一;20、方形孔二;2、无人机转向传动装置;201、圆柱套筒一;202、圆环一;203、三角柱;204、内啮合齿轮;205、仿齿形环槽;3、无人机转向调整装置;301、圆环板一;302、圆柱套筒二;303、圆柱筒;304、圆环槽一;305、三角柱二;306、环形槽;307、导向槽一;308、导向槽二;4、旋翼防护及束流装置;401、圆柱环套;402、连接杆;403、球形铰接头;404、凸形槽;405、方形连接块;406、圆柱杆;
5、旋翼转向驱动装置;501、储压椭圆管;502、限位台一;503、椭圆柱滑块;504、橡胶密封圈;505、圆柱推杆;506、半球形块;507、限位块三;508、限位台二;6、无人机转动驱动装置;601、防水电机二;603、齿轮一;604、齿轮二;605、蜗杆;606、蜗轮;607、弹簧;608、传动轴;609、传动卡扣;7、旋翼转向导向装置;701、圆柱筒二;702、半圆形槽;703、连接槽;704、半圆形槽二。
具体实施方式
20.为了使本发明的目的及优点更加清楚明白,以下结合实施例对本发明进行具体说明。应当理解,以下文字仅仅用以描述本发明的一种或几种具体的实施方式,并不对本发明具体请求的保护范围进行严格限定。
21.如图1-12所示,一种两栖无人机机翼,包括圆形机翼杆1,圆形机翼杆1的一端转动连接有旋翼转动圆环15,圆形机翼杆1的内部设置有旋翼转向驱动装置5,旋翼转动圆环15的轴心处固定连接有旋翼转向导向装置7,旋翼转向导向装置7与旋翼转向驱动装置5的一端传动连接,旋翼转动圆环15的一端固定连接有连接板16,连接板16的一端固定连接有电机安装台17,电机安装台17的内部设置有防水电机12,防水电机12的传动端传动连接有无人机旋翼11,电机安装台17的一端中部固定连接有球形铰接台14,电机安装台17的外侧设置有旋翼防护及束流装置4,旋翼防护及束流装置4与球形铰接台14铰接,圆形机翼杆1靠近电机安装台17的一端开设有多个透水孔18,圆形机翼杆1远离电机安装台17的一端固定连接有用于与无人机连接的无人机连接台13,无人机转向传动装置2转动连接在圆形机翼杆1的外壁,圆形机翼杆1的外壁转动连接有无人机转向调整装置3,圆形机翼杆1的另一端内部设置有无人机转动驱动装置6,无人机转动驱动装置6与无人机转向传动装置2传动连接,旋翼防护及束流装置4的远离电机安装台17的一侧可移动式连接在无人机转向调整装置3内。
22.根据上述结构,当无人机下沉至水中一定深度,旋翼转向驱动装置5受到外界水压的作用,带动旋翼转向导向装置7进行转动,进而使防水电机12的整体转动九十度,使得防水电机12能都更加高效的对无人机进行驱动,通过无人机转动驱动装置6对无人机转向传动装置2的驱动,带动无人机转向调整装置3进行转动,达到使旋翼防护及束流装置4围绕球形铰接台14进行一定角度的摆动,以此调整防水电机12带动的水流流向,实现对无人机整体辅助转向。
23.参照附图3-6,旋翼转向驱动装置5包括储压椭圆管501,储压椭圆管501固定连接在圆形机翼杆1的内壁,储压椭圆管501内滑动连接有椭圆柱滑块503,椭圆柱滑块503的环侧设置有橡胶密封圈504,储压椭圆管501靠近电机安装台17的一端的轴心处固定连接有圆柱推杆505,圆柱推杆505的靠近电机安装台17的一端固定连接有四个等距分布的限位块三507,限位块三507远离电机安装台17的一侧设置有半球形块506,半球形块506的固定连接在圆柱推杆505的外壁,且半球形块506的数量为四个,并阵列分布,半球形块506与限位块三507的数量与位置相对应,储压椭圆管501远离椭圆柱滑块503的一侧设置有限位台一502,限位台一502固定连接在储压椭圆管501的内壁,储压椭圆管501的开口处固定连接有限位台二508,限位块三507的为“胶囊”状。
24.进一步的,设置的橡胶密封圈504能够起到提升储压椭圆管501内部空气的密封
性,设置的限位台一502与限位台二508,起到保险作用,防止储压椭圆管501因内外压差较大,对半球形块506施加较大载荷,造成半球形块506的损坏,设置的限位块三507与半球形块506直降的间距小于旋翼转向导向装置7的长度,且差值不大于限位块三507的长度,这样设置能够起到在防水电机12整体转动后,进一步对防水电机12进行限位的目的。
25.根据上述结构,通过储压椭圆管501内部气压,与储压椭圆管501外壁气压或水压的压差,达到推动椭圆柱滑块503滑移的目的,进而带动圆柱推杆505上的半球形块506滑动在旋翼转向导向装置7内,实现带动旋翼转向导向装置7转动的目的。
26.参照附图6-7,旋翼转向导向装置7包括圆柱筒二701,圆柱筒二701固定连接在旋翼转动圆环15的轴心处,圆柱筒二701靠近电机安装台17的一侧内壁开设有阵列分布的四个半圆形槽702,圆柱筒二701远离电机安装台17的一侧内壁开设有阵列分布的四个半圆形槽二704,半圆形槽702与半圆形槽二704的数量与位置一一对应,且半圆形槽702与半圆形槽二704的数量与半球形块506的数量相同,半圆形槽702与半圆形槽二704通过连接槽703相互连通,半圆形槽702与半圆形槽二704逐一交错式连通,使连接槽703呈螺旋状,半球形块506卡接在半圆形槽702内,半圆形槽702的长度小于半圆形槽二704的长度。
27.进一步的,半圆形槽二704与半圆形槽702的数量均为四个,且阵列分布,在半球形块506的滑移下,经过连接槽703的导向,使得旋翼转向导向装置7整体刚好转动九十度,设置的半圆形槽702与半圆形槽二704的槽,是沿着旋翼转向导向装置7轴线方向,起到防止旋翼转向驱动装置5内外之间存在较小压差时,不会带动旋翼转向导向装置7整体发生转动,而半圆形槽702的长度小于半圆形槽二704的长度,起到保险作用,防止半球形块506滑移出半圆形槽二704。
28.根据上述结构,通过半球形块506在半圆形槽702内滑动,至于连接槽703接触时,由于旋翼转向驱动装置5为椭圆形,使得半球形块506无法转动,由此使得旋翼转向导向装置7发生转动。
29.参照附图8,旋翼防护及束流装置4包括球形铰接头403、圆柱环套401,球形铰接头403铰接在球形铰接台14的外壁,球形铰接头403的外壁等距分布有多个连接杆402,圆柱环套401套接在的电机安装台17的外侧,且圆柱环套401的轴心线与电机安装台17的轴心线同线,圆柱环套401的一侧与连接杆402的一端固定连接,圆柱环套401靠近无人机转向传动装置2的一端开设有凸形槽404,圆柱环套401靠近无人机转向传动装置2的一侧设置有方形连接块405,方形连接块405与圆柱环套401的相邻端设置有铰接圆台,且与圆柱环套401铰接,方形连接块405的中部滑动插接有圆柱杆406,圆柱杆406的长度大于方形连接块405宽度,圆柱杆406卡接在无人机转向调整装置3内。
30.进一步的,设置的方形连接块405与圆柱杆406,使得当圆柱环套401围绕球形铰接台14转动时,方形连接块405能够在圆柱杆406上进行一定的滑移,且方形连接块405也能够相对于圆柱环套401进行一定转动,使得圆柱环套401在方形连接块405的弧线移动能够平稳滑移,同时设置的圆柱环套401能够对防水电机12转动带动的水流进行约束与调整。
31.参照附图9-10,无人机转向调整装置3包括圆柱套筒二302,圆柱套筒二302转动连接在圆形机翼杆1的外壁,圆柱套筒二302的两端固定连接有对称设置的圆环板一301,圆环板一301远离电机安装台17的一侧固定连接有圆柱筒303,圆柱筒303靠近圆形机翼杆1的一侧开设有圆环槽一304,圆环槽一304的不相邻的两侧固定连接有阵列分布,且首尾相连的
三角柱二305,圆环板一301的相邻面开设有环形槽306,环形槽306的一端连通有导向槽二308,环形槽306的另一端连通有导向槽一307,环形槽306的圆心位于圆环板一301的轴心线上,圆柱杆406在常态下卡接在环形槽306内,导向槽二308由靠近环形槽306一端至另一端,距环形槽306的圆心间距降低,导向槽一307由靠近环形槽306一端至另一端,距环形槽306的圆心间距增加。
32.进一步的,设置的导向槽二308与导向槽一307,能够起到对圆柱杆406进行抬升与下移,设置的环形槽306的圆心角不大于十度,使得旋翼转向导向装置7带动旋翼防护及束流装置4转动时,无人机转向调整装置3能够同步转动,同时,设置的三角柱二305能够由于常态相不与无人机转向传动装置2契合,由此使得无人机转向调整装置3的独立转动不对无人机转向传动装置2施加切向载荷。
33.根据上述结构,通过圆环板一301的转动,带动环形槽306内的圆柱杆406滑动至导向槽二308或导向槽一307,由此使得圆柱杆406进行一定的下移,或上移,使得球形铰接台14能够围绕球形铰接台14进行摆动。
34.参照附图11-12,无人机转向传动装置2包括包括圆柱套筒一201,圆柱套筒一201转动连接在圆形机翼杆1的外壁,圆柱套筒一201远离电机安装台17的一端固定连接有内啮合齿轮204,内啮合齿轮204内开设有多个等距分布的仿齿形环槽205,圆柱套筒一201靠近电机安装台17的一端外壁固定连接有圆环一202,圆环一202不相邻的两端设置有阵列分布的三角柱203,且三角柱203首尾相连,圆环一202卡接在圆环槽一304内,三角柱203在常态下不与三角柱二305接触,无人机转动驱动装置6包括防水电机二601,无人机转向传动装置2的内壁远离电机安装台17的一端与防水电机二601外壁固定连接,防水电机二601的传动端侧设置有齿轮一603,防水电机二601的传动端与齿轮一603传动连接,齿轮一603远离电机安装台17的一侧设置有蜗杆605,齿轮一603的一侧传动连接有齿轮二604,齿轮二604转动连接在无人机转向传动装置2上开设的方形孔一19内,齿轮二604与内啮合齿轮204传动连接,蜗杆605的一侧传动连接有蜗轮606,蜗轮606转动连接在方形孔二20内,蜗轮606与仿齿形环槽205传动连接,蜗杆605的轴心处通过键可滑动式传动连接有传动轴608,传动轴608与防水电机二601的传动端接触面设置相互契合的传动卡扣609,传动轴608的远离防水电机二601的一端设置有弹簧607,弹簧607的远离防水电机二601的一端贴合在圆形机翼杆1的内壁。
35.进一步的,设置的蜗杆605能够起到单向传动的目的,同时也能起到防止旋翼防护及束流装置4带动无人机转向调整装置3转动与无人机转向传动装置2带动无人机转向调整装置3转动,两个传动相互干涉的目的,设置的内啮合齿轮204表面开设有多排仿齿形环槽205,使得蜗轮606在于仿齿形环槽205啮合时,齿轮二604对内啮合齿轮204啮合传动不会对影响蜗轮606对无人机转向传动装置2的施力,设置的传动卡扣609为多个三角柱等距分布组成,当蜗轮606无法转动时,即蜗杆605无法转动时,防水电机二601对传动轴608无法传动,使得传动轴608在三角柱的支撑下,在蜗杆605内来回滑动。
36.根据上述结构,通过防水电机二601带动传动轴608转动,进而带动蜗杆605转动,由此达到带动蜗轮606转动的目的,以此使三角柱二305能够与三角柱203契合,此时,齿轮一603带动齿轮二604,进而通过内啮合齿轮204带动圆柱套筒一201转动以此实现带动无人机转向调整装置3转动的目的,同时当防水电机二601反向转动时,圆环一202另一侧的三角
柱203与无人机转向调整装置3内的三角柱二305契合,同理实现对无人机转向调整装置3的反向驱动。
37.本发明的工作原理为:先将无人机下沉至水中,使旋翼转向驱动装置5受到外界水压的作用,带动旋翼转向导向装置7进行转动,进而使防水电机12的整体转动九十度,使得防水电机12能都更加高效的对无人机进行驱动,通过无人机转动驱动装置6对无人机转向传动装置2的驱动,带动无人机转向调整装置3进行转动,达到使旋翼防护及束流装置4围绕球形铰接台14进行一定角度的摆动,以此调整防水电机12带动的水流流向,实现对无人机整体辅助转向。
38.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。本发明中未具体描述和解释说明的结构、装置以及操作方法,如无特别说明和限定,均按照本领域的常规手段进行实施。