1.本实用新型涉及地质勘探设备技术领域,具体为一种基于无线遥控的地形勘探用无人机。
背景技术:
2.目前随着无人机的稳定性和续航能力不断提升,越来越多的地质勘探方面开始采用无人机作为载体搭载各类探头进行地质勘探活动,得益于无人机的飞行范围大,高度高等优势,能够更全面,更便捷的进行大面积地质的勘探工作,并且能够搭载多种探头实现多样化的勘探。
3.申请号为202021210454.9的专利公开了一种地质勘探用无人机,其包括无人机本体,无人机本体底面固定连接有支撑平台,支撑平台底面开设有远程槽和近程槽,远程槽中设置有远程勘探设备,近程槽中设置有近程勘探设备,支撑平台对应远程槽和近程槽之间的位置处固定连接有旋转轴,旋转轴上转动连接有平行于支撑平台所在平面设置的旋转端盖,旋转端盖能够分别覆盖远程槽和近程槽,支撑平台上设置有用于对旋转端盖进行限位的限位组件;无人机本体对应支撑平台四角位置处均固定连接有垂直于支撑平台所在平面设置的支撑脚。
4.但是现有的地质勘探无人机,不具有防撞保护机构,在较复杂的地形进行地质勘探的时候,容易被复杂的地形碰到,然后摔倒地上容易损坏无人机,非常不方便,为此,我们提出一种基于无线遥控的地形勘探用无人机。
技术实现要素:
5.本实用新型要解决的技术问题是克服现有的缺陷,提供一种基于无线遥控的地形勘探用无人机,具有防撞保护机构,在较复杂的地形进行地质勘探的时候,可以防止无人机被损坏,有效解决背景技术中的问题。
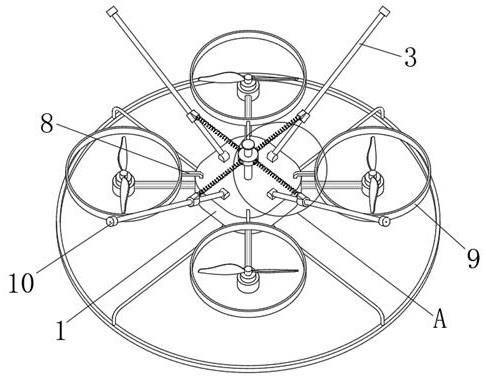
6.为实现上述目的,本实用新型提供如下技术方案:一种基于无线遥控的地形勘探用无人机,包括无线遥控无人机主体和防摔缓冲机构;
7.无线遥控无人机主体:上表面固定连接有四个均匀分布的支撑块,所述支撑块上转动连接有防护杆,所述防护杆的侧面下部固定套接有固定管,所述无线遥控无人机主体的下表面中部固定连接有电池;
8.防摔缓冲机构:设在固定管上;
9.其中:还包括单片机,所述单片机设在电池的下表面中部,所述单片机的输入端电连接电池的输出端。
10.进一步的,所述防摔缓冲机构包含连接块、弹簧、滑杆和滑环,所述连接块有四个且分别固定连接在四个固定管的外侧面上,所述弹簧固定连接在连接块上,所述弹簧的内端与滑环的外侧面固定连接,所述滑杆固定连接在无线遥控无人机主体的上表面中部,所述滑环活动套接在滑杆的外侧。当无线遥控无人机主体的上侧或者周边朝下摔倒地上的时
候,防护杆可以先接触地面,然后防护杆将来自地面的冲击通过固定管传向连接块,然后由连接块将冲击传给弹簧,由弹簧将冲击进行缓冲抵消,从而可以防止摔坏无线遥控无人机主体。
11.进一步的,还包括挡片,所述挡片固定连接在滑杆的上端。当滑环在在滑杆上滑动的时候,滑环滑到上端容易脱离滑杆,通过挡片,可以防止滑环脱离滑杆。
12.进一步的,还包括固定杆和防护环,所述固定杆固定连接在无线遥控无人机主体的上表面,所述防护环固定连接在固定杆的外端,所述防护环位于无线遥控无人机主体的机翼的外侧。当进行地质勘探时,通过防护环,可以防止飞行中的杂物或者较突出的尖锐地形从侧边碰到无线遥控无人机主体的机翼。
13.进一步的,还包括红外传感器和红光灯,所述红外传感器有四个且分别固定连接在四个防护杆的上端,所述红光灯固定连接在无线遥控无人机主体的下表面上,所述红外传感器的输出端电连接单片机的输入端,所述红光灯的输入端电连接单片机的输出端。当防护杆即将触碰到地形的时候,通过红外传感器,红外传感器感应到后给单片机传递信号,然后单片机带动红光灯启动,然后通过红光灯来做出警示。
14.进一步的,还包括弹性支撑杆和支撑圈,所述弹性支撑杆固定连接在无线遥控无人机主体的下表面,所述弹性支撑杆有四个且均匀分布,所述支撑圈固定连接在弹性支撑杆的下端。当无线遥控无人机主体的下侧朝下摔到地上的时候,通过支撑圈,支撑圈可以首先触底,然后将冲击传给弹性支撑杆,由弹性支撑杆来对冲击进行缓冲,从而保护无线遥控无人机主体。
15.与现有技术相比,本实用新型的有益效果是:本基于无线遥控的地形勘探用无人机,具有以下好处:
16.1、本基于无线遥控的地形勘探用无人机设置了防摔缓冲机构,当无线遥控无人机主体的上侧或者周边朝下摔倒地上的时候,防护杆可以先接触地面,然后防护杆将来自地面的冲击通过固定管传向连接块,然后由连接块将冲击传给弹簧,由弹簧将冲击进行缓冲抵消,从而可以防止摔坏无线遥控无人机主体;
17.2、本基于无线遥控的地形勘探用无人机设置了弹性支撑杆和支撑圈,当无线遥控无人机主体的下侧朝下摔到地上的时候,通过支撑圈,支撑圈可以首先触底,然后将冲击传给弹性支撑杆,由弹性支撑杆来对冲击进行缓冲,从而保护无线遥控无人机主体;
18.3、该基于无线遥控的地形勘探用无人机,具有防撞保护机构,在较复杂的地形进行地质勘探的时候,可以防止无人机被损坏。
附图说明
19.图1为本实用新型结构示意图;
20.图2为本实用新型下侧结构示意图;
21.图3为本实用新型a处放大结构示意图。
22.图中:1无线遥控无人机主体、2支撑块、3防护杆、4电池、5单片机、6防摔缓冲机构、61连接块、62弹簧、63滑杆、64滑环、7挡片、8固定杆、9防护环、10红外传感器、11红光灯、12弹性支撑杆、13支撑圈、14固定管。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.请参阅图1-3,本实施例提供一种技术方案:一种基于无线遥控的地形勘探用无人机,包括无线遥控无人机主体1和防摔缓冲机构6;
25.无线遥控无人机主体1:上表面固定连接有四个均匀分布的支撑块2,支撑块2上转动连接有防护杆3,防护杆3的侧面下部固定套接有固定管14,无线遥控无人机主体1的下表面中部固定连接有电池4;还包括固定杆8和防护环9,固定杆8固定连接在无线遥控无人机主体1的上表面,防护环9固定连接在固定杆8的外端,防护环9位于无线遥控无人机主体1的机翼的外侧。还包括红外传感器10和红光灯11,红外传感器10有四个且分别固定连接在四个防护杆3的上端,红光灯11固定连接在无线遥控无人机主体1的下表面上,红外传感器10的输出端电连接单片机5的输入端,红光灯11的输入端电连接单片机5的输出端。还包括弹性支撑杆12和支撑圈13,弹性支撑杆12固定连接在无线遥控无人机主体1的下表面,弹性支撑杆12有四个且均匀分布,支撑圈13固定连接在弹性支撑杆12的下端。当进行地质勘探时,通过防护环9,可以防止飞行中的杂物或者较突出的尖锐地形从侧边碰到无线遥控无人机主体1的机翼。当防护杆3即将触碰到地形的时候,通过红外传感器10,红外传感器10感应到后给单片机5传递信号,然后单片机5带动红光灯11启动,然后通过红光灯10来做出警示。当无线遥控无人机主体1的下侧朝下摔到地上的时候,通过支撑圈13,支撑圈13可以首先触底,然后将冲击传给弹性支撑杆12,由弹性支撑杆12来对冲击进行缓冲,从而保护无线遥控无人机主体1;
26.防摔缓冲机构6:设在固定管14上;防摔缓冲机构6包含连接块61、弹簧62、滑杆63和滑环64,连接块61有四个且分别固定连接在四个固定管14的外侧面上,弹簧62固定连接在连接块61上,弹簧62的内端与滑环64的外侧面固定连接,滑杆63固定连接在无线遥控无人机主体1的上表面中部,滑环64活动套接在滑杆63的外侧。还包括挡片7,挡片7固定连接在滑杆63的上端。当无线遥控无人机主体1的上侧或者周边朝下摔倒地上的时候,防护杆3可以先接触地面,然后防护杆3将来自地面的冲击通过固定管14传向连接块61,然后由连接块61将冲击传给弹簧62,由弹簧62将冲击进行缓冲抵消,从而可以防止摔坏无线遥控无人机主体1。当滑环64在在滑杆63上滑动的时候,滑环64滑到上端容易脱离滑杆63,通过挡片7,可以防止滑环64脱离滑杆63;
27.其中:还包括单片机5,单片机5设在电池4的下表面中部,单片机5的输入端电连接电池4的输出端。
28.本实用新型提供的一种基于无线遥控的地形勘探用无人机的工作原理如下:
29.首先,当无线遥控无人机主体1的上侧或者周边朝下摔倒地上的时候,防护杆3可以先接触地面,然后防护杆3将来自地面的冲击通过固定管14传向连接块61,然后由连接块61将冲击传给弹簧62,由弹簧62将冲击进行缓冲抵消,从而可以防止摔坏无线遥控无人机主体1,当无线遥控无人机主体1的下侧朝下摔到地上的时候,通过支撑圈13,支撑圈13可以首先触底,然后将冲击传给弹性支撑杆12,由弹性支撑杆12来对冲击进行缓冲,从而保护无
线遥控无人机主体1,并且当防护杆3即将触碰到地形的时候,通过红外传感器10,红外传感器10感应到后给单片机5传递信号,然后单片机5带动红光灯11启动,然后通过红光灯10来做出警示,从而可以提前作出预防。
30.值得注意的是,单片机5的具体型号pic16f1503-i/sl。单片机5控制红光灯11工作采用现有技术中常用的方法。
31.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。