1.本发明属于道路施工无人监测技术领域,尤其涉及一种智能化巡检无人机图像识别系统及其无人机。
背景技术:
2.道路对汽车安全性的影响表现在道路的发展以及道路网络的建设是否与人民的生活水平、生活习惯以及社会的经济发展相适应。如果车多路少,道路使用寿命会降低,易出现问题,因而交通安全问题会突出。其次是道路管理设施与交通控制设施是否科学合理。如果科学合理,在交通拥堵的时候也能井井有条地疏导车辆,解决交通拥堵问题,减少交通安全事故的发生。再次是道路设计对交通安全的影响。
3.往往有一些道路,因其设计不合理,致使驾驶员容易产生错误的判断,造成交通事故,这应该引起道路设计人员和管理人员的重视。如高速路直线过长容易使驾驶员疲劳,弯道与坡度不合理的搭配都可能引发交通事故。
4.目前道路畅通情况不断需要人工进行监测,为了减轻操作强度,故而应用到巡检无人机。
5.但是,现有的巡检无人机存在着系统工作步骤繁琐,无人机自身防护效果差,巡检时图像监测模块容易受光照影响,不具备升空警示功能和无法调节巡检方向问题。
6.因此,发明一种智能化巡检无人机图像识别系统及其无人机显得非常必要。
技术实现要素:
7.为了解决上述技术问题,本发明提供一种智能化巡检无人机图像识别系统及其无人机,本发明是通过以下技术方案得以实现的:
8.智能化巡检无人机包括无人机主机壳,蓄电池模块,无人机主机体,通讯模块,机架,无人机驱动电机,螺旋桨叶,防护架,防光照自动调节保护板结构,无人机落地缓冲保护杆结构和升空巡检警示灯结构,所述的无人机主机壳内部从左到右依次螺钉连接有蓄电池模块,无人机主机体和通讯模块;所述的无人机主机壳外侧四角部位均螺栓连接有机架;所述的机架下部外侧螺栓连接有无人机驱动电机;所述的无人机驱动电机的输出轴贯穿机架的内部,并且键连接螺旋桨叶的内部;所述的螺旋桨叶外部设置有防护架,并且防护架与机架外端螺栓连接设置;所述的无人机落地缓冲保护杆结构和升空巡检警示灯结构均与无人机主机壳相连接,其中防光照自动调节保护板结构单独设置,并且包括防护板,光照传感器,u型支架,长侧护片和自动调节杆,所述的防护板一端螺钉连接光照传感器,另一端螺纹连接u型支架;所述的u型支架内部轴接在长侧护片中上部;所述的自动调节杆一端轴接在长侧护片内部上端,另一端轴接在防护板内部中间偏左五厘米处部位。
9.本发明还提供一种智能化巡检无人机图像识别系统,主要包括自动巡检方向调节图像识别模块,且与防光照自动调节保护板结构相连接设置,其中自动巡检方向调节图像识别模块还包括齿轮箱,旋转电机,小齿轮,大齿轮,齿轮轴,自动调节巡检伸缩调节杆,巡
检云台和图像识别模块,所述的齿轮箱下部右侧螺钉连接有旋转电机;所述的旋转电机的输出轴贯穿齿轮箱底部右侧,并且键连接小齿轮的内部中间部位;所述的大齿轮通过齿轮轴安装在齿轮箱的内部左侧;所述的齿轮轴下部向下延伸,并且与自动调节巡检伸缩调节杆上端螺栓连接设置;所述的自动调节巡检伸缩调节杆的输出杆下端通过巡检云台和图像识别模块上端螺钉连接设置。
10.优选地,所述的无人机落地缓冲保护杆结构包括落地支架,防滑套,u型衬座,缓冲拉杆,衔接管,挡帽,开口环和缓冲弹簧,所述的落地支架一端插接在防滑套内部,另一端轴接在u型衬座内部;所述的缓冲拉杆一端螺纹连接挡帽内部,另一端轴接在落地支架内部中上侧;所述的缓冲拉杆外壁还套接有衔接管;所述的缓冲拉杆外壁中间部位开设的环形凹槽内部套接有开口环;所述的缓冲拉杆外壁套接有缓冲弹簧。
11.优选地,所述的升空巡检警示灯结构包括立杆,横座,提示条,警示灯体,衔接杆和扰流片,所述的立杆纵向上端螺栓连接在横座下部中间部位;所述的横座前部左右两侧以及后部左右两侧均螺钉连接有提示条;所述的横座左右两端均螺钉连接有警示灯体;所述的警示灯体外端通过衔接杆螺钉连接有扰流片。
12.优选地,所述的小齿轮和大齿轮啮合设置。
13.优选地,所述的自动调节巡检伸缩调节杆的输出杆下端和巡检云台之间螺钉连接设置。
14.优选地,所述的齿轮箱螺钉连接在无人机主机壳的底部中间部位。
15.优选地,所述的自动调节巡检伸缩调节杆的一级输出杆贯穿防护板的内部中间偏左三厘米处部位,且螺栓连接设置。
16.优选地,所述的图像识别模块包括用于获取道路路面实况图像的图像获取模块以及对所述实况图像进行处理的图像处理模块,其中图像处理模块通过设置的语义分割单元,二值化处理单元,车道线剔除单元,车辆轮廓提取单元和统计单元组成;
17.语义分割单元,对所述实况图像进行语义分割,获得车道区域和背景区域,并剔除图像中的背景区域;
18.二值化处理单元,对剔除背景区域的图像进行二值化处理,获得图像的二值化图像,在该二值化图像中,路面作为背景显示为黑色,车辆以及车道线为前景显示为白色;
19.车道线剔除单元,对所述二值化图像进行横向扫描,将横向连续n个像素点均为前景像素点的定义为车道线,并在该二值化图像中予以剔除,得到第一处理图像,其中n定义为车道线的宽度阈值,所述车道线包括行车道线以及应急车道线;
20.车辆轮廓提取单元,对所述第一处理图像进行扫描,并捕捉单独的汽车轮廓,得到第二处理图像;
21.统计单元,统计第二处理图像中独立的汽车轮廓数量,用于路面以及车辆的识别操作。
22.与现有技术相比,本发明具有如下有益效果:
23.1.本发明齿轮箱,旋转电机,小齿轮,大齿轮,齿轮轴,自动调节巡检伸缩调节杆,巡检云台和图像识别模块的设置,可进行多位置巡检调节操作,保证巡检效果,通过旋转电机带动小齿轮旋转,并啮合大齿轮旋转,使得大齿轮通过齿轮轴在齿轮箱内部旋转动作,即可使得自动调节巡检伸缩调节杆带动巡检云台和图像识别模块的设置旋转,可进行多位置
旋转巡检操作,并通过自动调节巡检伸缩调节杆伸缩动作以及巡检云台的旋转动作,可对图像识别模块进行调节,进而保证巡检效果;
24.2.本发明防护板,光照传感器,u型支架,长侧护片和自动调节杆的设置,可进行巡检防光保护操作,避免巡检时受光照影响导致图像识别不稳定或者出现光点的问题,通过光照传感器实时检测光照情况,并通过自动调节杆动作,带动长侧护片在u型支架内部动作,再配合防护板即可进行遮光操作,进而保证防光效果,提高图像识别巡检效果;
25.3.本发明落地支架,防滑套,u型衬座,缓冲拉杆,衔接管,挡帽,开口环和缓冲弹簧的设置,可进行落地自身缓冲保护操作,避免损伤,通过落地支架配合防滑套落地,可进行防滑操作,并在u型衬座内部动作,使得缓冲拉杆在衔接管内部动作,再配合缓冲弹簧的缓冲动作,即可进行缓冲保护,以保证落地缓冲性,避免设备损伤;
26.4.本发明立杆,横座,提示条,警示灯体,衔接杆和扰流片的设置,可进升空警示操作,避免误触或者非法破损,通过立杆和横座支撑保护,并通过警示灯体进行警示提示,进而保证防护效果,提高警示效果,通过扰流片可减少阻力,保证升空效率,提高巡检力度,保证图像识别稳定性;
27.5.本发明无人机主机壳的设置,可保证防护效果,避免器件损伤;
28.6.本发明蓄电池模块,无人机主机体和通讯模块的设置,可保证供电效果,并可进行无线通信操作,保证操作更加智能化,稳定化;
29.7.本发明机架保证飞行稳定性;
30.8.本发明无人机驱动电机和螺旋桨叶的设置,可保证无人机飞行稳定性;
31.9.本发明防护架的设置,可对螺旋桨叶起到保护作用。
附图说明
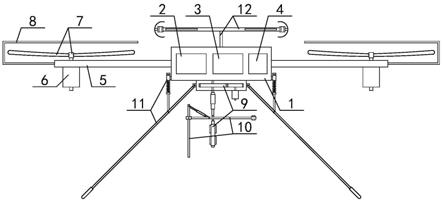
32.图1是本发明的整体结构示意图。
33.图2是本发明的自动巡检方向调节图像识别模块的结构示意图。
34.图3是本发明的防光照自动调节保护板结构的结构示意图。
35.图4是本发明的无人机落地缓冲保护杆结构的结构示意图。
36.图5是本发明的升空巡检警示灯结构的结构示意图。
37.图中:
38.1、无人机主机壳;2、蓄电池模块;3、无人机主机体;4、通讯模块;5、机架;6、无人机驱动电机;7、螺旋桨叶;8、防护架;9、自动巡检方向调节图像识别模块;91、齿轮箱;92、旋转电机;93、小齿轮;94、大齿轮;95、齿轮轴;96、自动调节巡检伸缩调节杆;97、巡检云台;98、图像识别模块;10、防光照自动调节保护板结构;101、防护板;102、光照传感器;103、u型支架;104、长侧护片;105、自动调节杆;11、无人机落地缓冲保护杆结构;111、落地支架;112、防滑套;113、u型衬座;114、缓冲拉杆;115、衔接管;116、挡帽;117、开口环;118、缓冲弹簧;12、升空巡检警示灯结构;121、立杆;122、横座;123、提示条;124、警示灯体;125、衔接杆;126、扰流片。
具体实施方式
39.以下结合附图对本发明做进一步描述:
40.图中:
41.如附图1至附图3所示
42.一种智能化巡检无人机,包括无人机主机壳1,蓄电池模块2,无人机主机体3,通讯模块4,机架5,无人机驱动电机6,螺旋桨叶7和防护架8,所述的无人机主机壳1内部从左到右依次螺钉连接有蓄电池模块2,无人机主机体3和通讯模块4;所述的无人机主机壳1外侧四角部位均螺栓连接有机架5;所述的机架5下部外侧螺栓连接有无人机驱动电机6;所述的无人机驱动电机6的输出轴贯穿机架5的内部,并且键连接螺旋桨叶7的内部;所述的螺旋桨叶7外部设置有防护架8,并且防护架8与机架5外端螺栓连接设置。
43.一种智能化巡检无人机,还包括防光照自动调节保护板结构10,无人机落地缓冲保护杆结构11和升空巡检警示灯结构12,所述的无人机落地缓冲保护杆结构11和升空巡检警示灯结构12均与无人机主机壳1相连接。
44.其中防光照自动调节保护板结构10单独设置,并且包括防护板101,光照传感器102,u型支架103,长侧护片104和自动调节杆105,所述的防护板101一端螺钉连接光照传感器102,另一端螺纹连接u型支架103;所述的u型支架103内部轴接在长侧护片104中上部;所述的自动调节杆105一端轴接在长侧护片104内部上端,另一端轴接在防护板101内部中间偏左五厘米处部位,通过光照传感器102实时检测光照情况,并通过自动调节杆105动作,带动长侧护片104在u型支架103内部动作,再配合防护板101即可进行遮光操作,进而保证防光效果,提高图像识别巡检效果。
45.本发明还提供一种智能化巡检无人机图像识别系统,主要包括自动巡检方向调节图像识别模块9,且与防光照自动调节保护板结构10相连接设置,其中自动巡检方向调节图像识别模块9还包括齿轮箱91,旋转电机92,小齿轮93,大齿轮94,齿轮轴95,自动调节巡检伸缩调节杆96,巡检云台97和图像识别模块98,所述的齿轮箱91下部右侧螺钉连接有旋转电机92;所述的旋转电机92的输出轴贯穿齿轮箱91底部右侧,并且键连接小齿轮93的内部中间部位;所述的大齿轮94通过齿轮轴95安装在齿轮箱91的内部左侧;所述的齿轮轴95下部向下延伸,并且与自动调节巡检伸缩调节杆96上端螺栓连接设置;所述的自动调节巡检伸缩调节杆96的输出杆下端通过巡检云台97和图像识别模块98上端螺钉连接设置,通过旋转电机92带动小齿轮93旋转,并啮合大齿轮94旋转,使得大齿轮94通过齿轮轴95在齿轮箱91内部旋转动作,即可使得自动调节巡检伸缩调节杆96带动巡检云台97和图像识别模块98的设置旋转,可进行多位置旋转巡检操作,并通过自动调节巡检伸缩调节杆96伸缩动作以及巡检云台97的旋转动作,可对图像识别模块98进行调节,进而保证巡检效果。
46.具体实施方案中,具体的,结合附图4所示,所述的无人机落地缓冲保护杆结构11包括落地支架111,防滑套112,u型衬座113,缓冲拉杆114,衔接管115,挡帽116,开口环117和缓冲弹簧118,所述的落地支架111一端插接在防滑套112内部,另一端轴接在u型衬座113内部;所述的缓冲拉杆114一端螺纹连接挡帽116内部,另一端轴接在落地支架111内部中上侧;所述的缓冲拉杆114外壁还套接有衔接管115;所述的缓冲拉杆114外壁中间部位开设的环形凹槽内部套接有开口环117;所述的缓冲拉杆114外壁套接有缓冲弹簧118,通过落地支架111配合防滑套112落地,可进行防滑操作,并在u型衬座113内部动作,使得缓冲拉杆114在衔接管115内部动作,再配合缓冲弹簧118的缓冲动作,即可进行缓冲保护,以保证落地缓冲性,避免设备损伤。
47.具体实施方案中,具体的,结合附图5所示,所述的升空巡检警示灯结构12包括立杆121,横座122,提示条123,警示灯体124,衔接杆125和扰流片126,所述的立杆121纵向上端螺栓连接在横座122下部中间部位;所述的横座122前部左右两侧以及后部左右两侧均螺钉连接有提示条123;所述的横座122左右两端均螺钉连接有警示灯体124;所述的警示灯体124外端通过衔接杆125螺钉连接有扰流片126,通过立杆121和横座122支撑保护,并通过警示灯体124进行警示提示,进而保证防护效果,提高警示效果,通过扰流片126可减少阻力,保证升空效率,提高巡检力度,保证图像识别稳定性。
48.具体实施方案中,具体的,所述的通讯模块4与无人机主机体3双向导线连接设置,所述的无人机驱动电机6,旋转电机92,自动调节巡检伸缩调节杆96,巡检云台97,图像识别模块98,光照传感器102,自动调节杆105和警示灯体124均与无人机主机体3导线连接设置,其中通讯模块4无人机驱动电机6,旋转电机92,自动调节巡检伸缩调节杆96,巡检云台97,图像识别模块98,光照传感器102,自动调节杆105,警示灯体124与无人机主机体3均通过蓄电池模块2进行供电。
49.具体实施方案中,具体的,所述的防护板101采用镀白漆层铝合金板。
50.具体实施方案中,具体的,所述的长侧护片104采用不锈钢片或者白色pvc塑料片。
51.具体实施方案中,具体的,所述的图像识别模块98包括用于获取道路路面实况图像的图像获取模块以及对所述实况图像进行处理的图像处理模块,其中图像处理模块通过设置的语义分割单元,二值化处理单元,车道线剔除单元,车辆轮廓提取单元和统计单元组成;
52.语义分割单元,对所述实况图像进行语义分割,获得车道区域和背景区域,并剔除图像中的背景区域;
53.二值化处理单元,对剔除背景区域的图像进行二值化处理,获得图像的二值化图像,在该二值化图像中,路面作为背景显示为黑色,车辆以及车道线为前景显示为白色;
54.车道线剔除单元,对所述二值化图像进行横向扫描,将横向连续n个像素点均为前景像素点的定义为车道线,并在该二值化图像中予以剔除,得到第一处理图像,其中n定义为车道线的宽度阈值,所述车道线包括行车道线以及应急车道线;
55.车辆轮廓提取单元,对所述第一处理图像进行扫描,并捕捉单独的汽车轮廓,得到第二处理图像;
56.统计单元,统计第二处理图像中独立的汽车轮廓数量,用于路面以及车辆的识别操作。
57.具体实施方案中,具体的,所述的缓冲弹簧118设置在衔接管115和开口环117之间。
58.具体实施方案中,具体的,所述的落地支架111采用长铝合金支架。
59.具体实施方案中,具体的,所述的防滑套112采用封口橡胶套。
60.具体实施方案中,具体的,所述的缓冲拉杆114采用铝合金杆,所述的缓冲弹簧118采用圆柱形不锈钢弹簧。
61.具体实施方案中,具体的,所述的衔接管115均纵向螺栓连接在无人机主机壳1下部外侧四角部位。
62.具体实施方案中,具体的,所述的u型衬座113均螺栓连接在齿轮箱91外侧四角中
间部位。
63.具体实施方案中,具体的,所述的立杆121纵向下端螺栓连接在无人机主机壳1顶部中间部位。
64.具体实施方案中,具体的,所述的提示条123采用黄白相间的荧光条。
65.具体实施方案中,具体的,所述的扰流片126采用半弧形pvc塑料片。
66.具体实施方案中,具体的,所述的通讯模块4采用hc-08型蓝牙模块或者wifi模块。
67.具体实施方案中,具体的,所述的无人机主机体3采用stm32f103型单片机。
68.具体实施方案中,具体的,所述的无人机驱动电机6采用775型电动机,所述的旋转电机92采用jm-08型蜗轮蜗杆减速电机,所述的自动调节巡检伸缩调节杆96采用lx600型电动推杆,所述的巡检云台97采用小型360度可旋转电动云台,所述的光照传感器102采用光敏传感器,所述的自动调节杆105采用lx600型电动推杆,所述的警示灯体124采用红黄相间的led灯,所述的蓄电池模块2采用24v可充电锂离子蓄电池。
69.具体实施方案中,具体的,所述的通讯模块4无线信号连接外置遥控器或者智能手机。
70.工作原理
71.本发明,通过旋转电机92带动小齿轮93旋转,并啮合大齿轮94旋转,使得大齿轮94通过齿轮轴95在齿轮箱91内部旋转动作,即可使得自动调节巡检伸缩调节杆96带动巡检云台97和图像识别模块98的设置旋转,可进行多位置旋转巡检操作,并通过自动调节巡检伸缩调节杆96伸缩动作以及巡检云台97的旋转动作,可对图像识别模块98进行调节,进而保证巡检效果,通过光照传感器102实时检测光照情况,并通过自动调节杆105动作,带动长侧护片104在u型支架103内部动作,再配合防护板101即可进行遮光操作,进而保证防光效果,提高图像识别巡检效果,通过落地支架111配合防滑套112落地,可进行防滑操作,并在u型衬座113内部动作,使得缓冲拉杆114在衔接管115内部动作,再配合缓冲弹簧118的缓冲动作,即可进行缓冲保护,以保证落地缓冲性,避免设备损伤,通过立杆121和横座122支撑保护,并通过警示灯体124进行警示提示,进而保证防护效果,提高警示效果,通过扰流片126可减少阻力,保证升空效率,提高巡检力度,保证图像识别稳定性。
72.利用本发明所述的技术方案,或本领域的技术人员在本发明技术方案的启发下,设计出类似的技术方案,而达到上述技术效果的,均是落入本发明的保护范围。