1.本发明属于微型扑翼无人飞行器技术领域,具体涉及一种用于扑翼飞行器的微型直驱传动系统。
背景技术:
2.微型扑翼飞行器是一种模仿鸟类和昆虫飞行方式的无人飞行器,因其独特的仿生外形和飞行特性,使其具有了高度机动性和灵活性以及隐蔽性,因而在低空侦察、城市作战、电子干扰、核生化探测、地理勘测、自然灾害监视与支援、环境污染监测以及边境巡逻等任务中相较于固定翼式和旋翼式微型飞行器更具优势,在国防军事以及民用方面有着广泛的应用前景。扑动翼传动系统作为扑翼飞行器的关键组成系统,其性能好坏对于飞行器整体飞行性能具有重要的影响。目前在仿鸟扑翼飞行器中主要的传动形式是直流电机作为动力源,利用曲柄摇杆等连杆机构和齿轮齿条等实现周转运动与往复运动的转化。在仿昆虫扑翼飞行器中,基于智能材料学者们提出了多种新型的驱动方式,如压电驱动、人工肌肉、电磁驱动等。
3.目前在仿昆虫扑翼飞行器中,由于飞行器整体尺寸和重量小,而且扑动翼的扑动频率较高,传统的电机加曲柄摇杆或齿轮齿条的传动机构,结构复杂,运动精度低,可靠性差,很难满足飞行器的设计需求。而受限于材料、微机电以及加工制造等技术的制约,新型驱动方式很难用于实际工程化的扑翼飞行器中。如何能够结合现有技术水平以及飞行器应用需求,设计满足微型仿昆虫扑翼飞行器性能要求的传动系统,成为制约微型扑翼飞行器工程化的关键问题,亟待解决。
技术实现要素:
4.本发明的目的在于提供一种用于扑翼飞行器的微型直驱传动系统,解决了现有技术中存在的上述不足。
5.为了达到上述目的,本发明采用的技术方案是:
6.本发明提供的一种用于扑翼飞行器的微型直驱传动系统,包括无刷直流电机和片状不完全齿轮,其中,所述无刷直流电机的输出轴驱动连接有片状不完全齿轮;所述片状不完全齿轮与扑动翼连接。
7.优选地,所述无刷直流电流的输出端安装有电机端齿轮,所述电机端齿轮与片状不完全齿轮啮合连接。
8.优选地,所述机体支架上安装有用于获取扑动翼转动角度的翼位置传感系统。
9.优选地,所述翼位置传感系统包括磁铁和角度传感器,其中,所述磁铁通过传动件与片状不完全齿轮固定连接;所述角度传感器固定在机体支架上;且与磁铁相配合。
10.优选地,所述传动件包括连接轴,所述连接轴的一端与片状不完全齿轮连接;另一端与磁铁连接。
11.优选地,所述连接轴上还套装有弹簧。
12.优选地,所述无刷直流电机的输入端连接有电子调速系统,所述电子调速系统的输入端与翼位置传感系统连接。
13.优选地,所述无刷直流电机安装在机体支架上。
14.优选地,所述片状不完全齿轮安装在齿轮支架上,所述齿轮支架固定在机体支架上。
15.与现有技术相比,本发明的有益效果是:
16.本发明提供的一种用于扑翼飞行器的微型直驱传动系统,采用直驱传动系统,在保证传动功率和扭矩要求的基础上,极大的简化了传动系统结构,提高了飞行器整体的传动效率以及机械可靠性。
17.进一步的,通过翼位置传感系统结合电子调速系统能够保证传动系统的运动性能,便于对运动参数进行控制,有利于实现更复杂的运动组合,能够极大的促进微型仿生扑翼飞行器的工程化应用。
附图说明
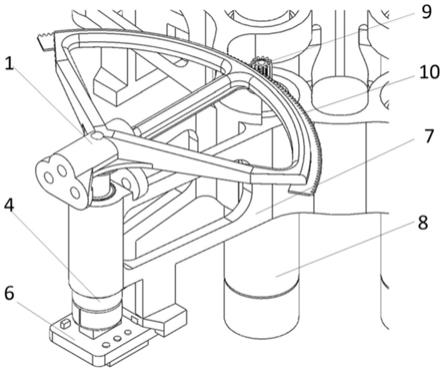
18.图1是本发明涉及的直驱传动机构示意图;
19.图2是本发明涉及的传动系统结构示意图;
20.图3是本发明涉及传动系统的控制原理图。
21.图中:1.齿轮支架;2.轴承;3.轴;4.磁铁支架;5.磁铁;6.角度传感器;7.机体支架;8.无刷直流电机;9.齿轮;10.不完全齿轮;11.电子调速系统;12.弹簧。
具体实施方式
22.下面结合附图,对本发明进一步详细说明。
23.本发明中使用到的标准零件均可以从市场上购买,异性件根据说明书记载可以进行定制,各个零件的具体连接方式均采用现有技术中成熟的螺栓、焊接、粘贴等常规手段,在此不再详述。
24.如附图1所示,本发明提供的一种用于扑翼飞行器的微型直驱传动系统,包括齿轮支架1、轴承2、连接轴3、磁铁支架4、磁铁5、角度传感器6、机体支架7、无刷直流电机8、电机端齿轮9、片状不完全齿轮10、电子调速系统11以及弹簧12等部件。
25.其中,所述无刷直流电机8安装在机体支架7上;所述无刷直流电机8的输入端连接电子调速系统11,所述无刷直流电机8的输出端安装有电机端齿轮9。
26.所述电机端齿轮9啮合连接有片状不完全齿轮10,所述片状不完全齿轮10安装在齿轮支架1上,扑动翼安装在齿轮支架1的另一端。
27.所述齿轮支架1上还安装有连接轴3,所述连接轴3依次穿过固定在机体支架7上的两个轴承2。
28.所述连接轴3的一端转动安装在磁铁支架4上,且与安装在磁铁支架4另一端的径向充磁磁铁5固定连接。
29.所述连接轴3的另一端与片状不完全齿轮10固定连接。
30.所述角度传感器6安装在机体支架7上,且与磁铁5组成翼位置传感系统,用于获取连接轴3的转动角度,并将角度信息输入给电子调速系统11。
31.所述弹簧12套装在连接轴3,在扑翼运动过程中产生恢复力矩,提高机构的加减速换向性能,弹簧刚度系数通过实验确定,通过测试弹簧在不同角度位置的扭矩,选择合适刚度系数的弹簧。
32.所述电子调速系统11用于根据接收到的转动角度对无刷直流电机8进行调控,调控过程如附图2所示,工作过程为:
33.电子调速系统11接收外部控制信号,驱动无刷直流电机8运动,通过角度传感器6与磁铁5组成翼位置传感系统,将实际运动状态反馈到电子调速系统11,实现无刷直流电机8运动的精确调控。在调控过程中,为了减小电机在往复换向过程中由于加减速过程带来的力矩突变所带来的冲击,电子调速系统11采用了抛物线型s曲线进行加减速控制。同时为了减小非平稳气动力以及其他扰动对电机运动过程的影响,电子调速系统采用了pi d级联控制。
34.本发明的工作过程:
35.在进行微型扑翼飞行器中,电子调速系统11接收飞控系统的运动指令,驱动无刷直流电机8输出驱动力矩,力矩通过电机端齿轮9按照传动比作用于片状不完全齿轮10上,带动齿轮支架1执行运动;扑动翼安装在齿轮支架1上,运动过程中,利用径向充磁磁铁5以及角度传感器6组成的翼位置传感系统对扑动翼的运动角度进行检测,并将检测结果发送给电子调速系统11,最终实现对整个驱动系统运动过程的精确调控。
技术特征:
1.一种用于扑翼飞行器的微型直驱传动系统,其特征在于,包括无刷直流电机(8)和片状不完全齿轮(10),其中,所述无刷直流电机(8)的输出轴驱动连接有片状不完全齿轮(10);所述片状不完全齿轮(10)与扑动翼连接。2.根据权利要求1所述的一种用于扑翼飞行器的微型直驱传动系统,其特征在于,所述无刷直流电流(8)的输出端安装有电机端齿轮(9),所述电机端齿轮(9)与片状不完全齿轮(10)啮合连接。3.根据权利要求1所述的一种用于扑翼飞行器的微型直驱传动系统,其特征在于,所述机体支架上安装有用于获取扑动翼转动角度的翼位置传感系统。4.根据权利要求3所述的一种用于扑翼飞行器的微型直驱传动系统,其特征在于,所述翼位置传感系统包括磁铁(5)和角度传感器(6),其中,所述磁铁(5)通过传动件与片状不完全齿轮(10)固定连接;所述角度传感器(6)固定在机体支架(7)上;且与磁铁(5)相配合。5.根据权利要求4所述的一种用于扑翼飞行器的微型直驱传动系统,其特征在于,所述传动件包括连接轴(3),所述连接轴(3)的一端与片状不完全齿轮(10)连接;另一端与磁铁(5)连接。6.根据权利要求5所述的一种用于扑翼飞行器的微型直驱传动系统,其特征在于,所述连接轴(3)上还套装有弹簧(12)。7.根据权利要求3所述的一种用于扑翼飞行器的微型直驱传动系统,其特征在于,所述无刷直流电机(8)的输入端连接有电子调速系统(11),所述电子调速系统(11)的输入端与翼位置传感系统连接。8.根据权利要求1所述的一种用于扑翼飞行器的微型直驱传动系统,其特征在于,所述无刷直流电机(8)安装在机体支架上。9.根据权利要求8所述的一种用于扑翼飞行器的微型直驱传动系统,其特征在于,所述片状不完全齿轮(10)安装在齿轮支架(1)上,所述齿轮支架(1)固定在机体支架上。
技术总结
本发明提供的一种用于扑翼飞行器的微型直驱传动系统,包括无刷直流电机和片状不完全齿轮,其中,所述无刷直流电机的输出轴驱动连接有片状不完全齿轮;所述片状不完全齿轮与扑动翼连接;该结构能够在保证传动功率和扭矩要求的基础上,极大的简化了传动系统结构,提高了飞行器整体的传动效率以及机械可靠性。了飞行器整体的传动效率以及机械可靠性。了飞行器整体的传动效率以及机械可靠性。
技术研发人员:杨晓君 张明昊 宋笔锋 稂鑫雨 刘恒 杨驰
受保护的技术使用者:西北工业大学深圳研究院
技术研发日:2021.12.02
技术公布日:2022/1/14