1.本公开一般涉及无人机技术领域,尤其涉及一种无人机机臂折叠结构及无人机。
背景技术:
2.随着科技的进步及用户需求的不断提升,无人机应用场景越来越丰富,例如航拍、安防、水利、巡检、农药喷洒等。现有无人机机臂上的折叠结构多采用手动调节方式,在放置无人机时或使用无人机前,都需要手动进行机臂的调整,无人机使用较为不便。
技术实现要素:
3.鉴于现有技术中的上述缺陷或不足,期望提供一种使得机臂折叠后具有自动回弹功能的机臂折叠结构。具体方案如下:
4.第一方面本技术公开了一种一种无人机机臂折叠结构,包括:
5.机臂连接件,所述机臂连接件设于机臂的一端;
6.主体连接件,所述主体连接件与所述机臂连接件铰接;
7.回弹部件,所述回弹部件设于所述机臂连接件和所述主体连接件之间;
8.当机臂另一端承受施加于其上的第一外力,使得所述机臂连接件相对于所述主体连接件围绕两者铰接处旋转至折叠状态;折叠状态时,所述机臂连接件和所述主体连接件之间形成第一设定角度;
9.当所述第一外力消失时,所述机臂连接件受所述回弹部件的拉力,使得所述机臂连接件和所述主体连接件之间自折叠状态恢复至第一初始状态。
10.进一步,还包括:锁止结构,所述锁止结构设于所述机臂连接件和所述主体连接件的连接处;
11.当所述机臂连接件和所述主体连接件之间处于第一初始状态时,所述锁止结构将所述机臂连接件和所述主体连接件之间的相对位置锁定。
12.进一步,所述主体连接件上设有调节孔,所述锁止结构包括:
13.限位部,所述限位部设于所述机臂连接件上,且位于靠近所述主体连接件的一侧;
14.限位销,所述限位销设于所述调节孔内,并可在所述调节孔内进行调节;
15.弹性部件,所述弹性部件设于所述限位销与所述机臂连接件间;
16.当所述限位销承受施加于其上的第二外力,使得所述限位销远离所述限位部;
17.当所述第二外力消失时,所述限位销受所述弹性部件的拉力,使得所述限位销与所述限位部接触。
18.进一步,所述限位部上可与所述限位销接触的部分包括:
19.限位面,当所述限位销与所述限位部在所述限位面接触时,所述限位销与所述限位部配合锁定,所述限位销处于第二初始状态;
20.滑动面,当所述限位销与所述限位部在所述滑动面接触时,所述限位销可在所述滑动面上发生相对滑动,所述限位销处于滑动状态。
21.进一步,所述限位面与所述弹性部件伸缩方向成第二设定角度,使得所述限位销受到所述弹性部件的拉力恢复至第二初始状态时,所述限位销向所述限位面施加压力,所述压力在竖直方向上有分量。
22.进一步,所述滑动面为圆滑曲面。
23.进一步,所述回弹部件可拆卸的连接于所述机臂连接件和所述主体连接件之间;
24.所述弹性部件可拆卸的连接于所述主体连接件上。
25.第二方面本技术提供了一种无人机,包括无人机主体,若干机臂,以及与所述机臂配合的如权利要求1-7任意一项所述的无人机机臂折叠结构,所述无人机机臂折叠结构沿所述无人机主体周向设置。
26.进一步,所述机臂上设有电机安装座,所述电机安装座为多个,且所述电机安装座尺寸可调节。
27.进一步,所述机臂上设有可伸缩结构,所述可伸缩结构设于所述无人机机臂折叠结构与所述电机安装座之间。
28.本技术的有益效果在于:
29.在所述机臂连接件和所述主体连接件之间设置所述回弹部件,使得当需要将无人机放置时,可对所述机臂另一端施加所述第一外力,所述机臂连同所述机臂连接件相对于所述主体连接件围绕两者铰接处旋转至折叠状态,无人机可以放置到较小的空间进行收纳,方便了无人机的携带。折叠状态时,所述机臂连接件和所述主体连接件之间形成所述第一设定角度,所述第一设定角度由所述无人机机臂在收纳空间内壁的折叠情况决定。此时由于所述弹性部件的拉力,所述机臂保持有恢复至第一初始状态的趋势,进而所述无人机主体通过所述机臂悬空在收纳空间内;
30.当无人机被取出后,所述第一外力消失,所述机臂连接件受所述回弹部件的拉力,使得所述机臂连接件和所述主体连接件之间自折叠状态恢复至第一初始状态。此时,无人机可快速投入使用。上述无人机机臂折叠结构使得无人机机臂具有折叠后的自动展开功能,方便了无人机的拿取和放置。
附图说明
31.通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本技术的其它特征、目的和优点将会变得更明显:
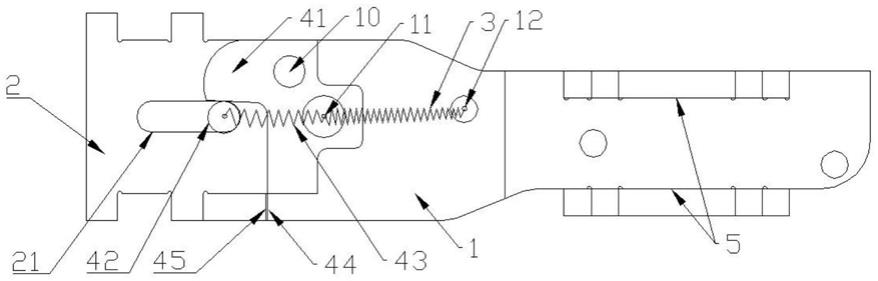
32.图1为本技术无人机机臂折叠结构和机臂连接后的整体结构示意图;
33.图2为图1所示的无人机机臂折叠结构中限位部的结构示意图;
34.图3为图1所示的无人机机臂折叠结构的爆炸图。
35.图中标号:1、机臂连接件;2、主体连接件;10、铰接轴;11、第一固定点;12、第二固定点;3、回弹部件;21、调节孔;41、限位部;42、限位销;43、弹性部件;44、第一抵接部;45、第二抵接部;411、限位面;412、滑动面;5、电机安装座。
具体实施方式
36.下面结合附图和实施例对本技术作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关申请,而非对该申请的限定。另外还需要说明的是,为了
便于描述,附图中仅示出了与申请相关的部分。
37.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
38.实施例1
39.请参考图1,本实施例提供一种无人机机臂折叠结构,其特征在于,包括:
40.机臂连接件1,所述机臂连接件1设于机臂的一端;
41.主体连接件2,所述主体连接件2与所述机臂连接件1铰接;
42.回弹部件3,所述回弹部件3设于所述机臂连接件1和所述主体连接件2之间;
43.当机臂另一端承受施加于其上的第一外力,使得所述机臂连接件1相对于所述主体连接件2围绕两者铰接处旋转至折叠状态;折叠状态时,所述机臂连接件1和所述主体连接件2之间形成第一设定角度;
44.当所述第一外力消失时,所述机臂连接件1受所述回弹部件3的拉力,使得所述机臂连接件1和所述主体连接件2之间自折叠状态恢复至第一初始状态。
45.在所述机臂连接件1和所述主体连接件2之间设置所述回弹部件3,使得当需要将无人机放置时,可对所述机臂另一端施加所述第一外力,所述机臂连同所述机臂连接件1相对于所述主体连接件2围绕两者铰接处,即铰接轴10旋转至折叠状态,无人机可以放置到较小的空间进行收纳,方便了无人机的携带。在折叠过程中,由于所述铰接轴10与第二固定点12之间的距离不变,第一固定点11与第二固定点12之间的距离增大,所以,所述回弹部件3会被拉伸。折叠状态时,所述机臂连接件1和所述主体连接件2之间形成所述第一设定角度,所述第一设定角度由所述无人机机臂在收纳空间内的折叠情况决定。将无人机整体放入收纳空间内时,所述第一外力由收纳空间内壁施加,此时由于所述弹性部件3的拉力,所述机臂保持有恢复至第一初始状态的趋势,进而所述无人机主体通过所述机臂悬空在收纳空间内;
46.当无人机被取出后,所述收纳空间内壁对机臂施加在所述机臂上的第一外力消失,所述机臂连接件受所述回弹部件的拉力,使得所述机臂连接件和所述主体连接件之间自折叠状态恢复至第一初始状态。此时,无人机可快速投入使用。上述无人机机臂折叠结构使得无人机机臂具有折叠后的自动展开功能,方便了无人机的拿取和放置。可选的,所述机臂连接件和所述机臂可为分体设置,也可为一体制成;所述主体连接件和所述无人机主体可为分体设置,也可为一体制成。
47.其中在所述机臂连接件和所述主体连接件保持第一初始状态的优选实施方式中,其特征在于,还包括:
48.锁止结构,所述锁止结构设于所述机臂连接件1和所述主体连接件2的连接处;
49.当所述机臂连接件1和所述主体连接件2之间处于第一初始状态时,所述锁止结构将所述机臂连接件1和所述主体连接件2之间的相对位置锁定。
50.所述锁止结构将所述机臂连接件1和所述主体连接件2之间的相对位置锁定,使得机臂能够支撑起无人机主体,无人机可投入使用。
51.其中在所述锁止结构的优选实施方式中,所述主体连接件2上设有调节孔21,所述锁止结构包括:
52.限位部41,所述限位部41设于所述机臂连接件1上,且位于靠近所述主体连接件2
的一侧;
53.限位销42,所述限位销42设于所述调节孔21内,并可在所述调节孔21内进行调节;
54.弹性部件43,所述弹性部件43设于所述限位销42与所述机臂连接件1间;
55.当所述限位销42承受施加于其上的第二外力,使得所述限位销42远离所述限位部41;
56.当所述第二外力消失时,所述限位销42受所述弹性部件43的拉力,使得所述限位销42与所述限位部41接触。
57.当需要对所述机臂进行折叠时,需要对所述限位销42施加所述第二外力,使得所述限位销42远离所述限位部41,所述弹性部件43处于被拉伸的状态,此时在对所述机臂另一端施加所述第一外力后,所述机臂连接件1便可以相对于所述主体连接件2围绕两者铰接处旋转至折叠状态,所述第二外力用于解除所述机臂连接件1和所述主体连接件2之间的位置锁定;
58.当所述第二外力消失后,所述限位销42因受到所述弹性部件43的拉力作用,会与所述限位部接触。当所述第一外力也消失时,所述机臂连接件1和所述主体连接件2之间的位置重新被锁定,方便了无人机取出后快速投入使用。
59.优选地,在限位销42与所述限位部41抵接处的下方,所述主体连接件2上设有第二抵接部45,所述机臂连接件1上设有第一抵接部44,当所述机臂连接件1与所述主体连接件2之间恢复至所述第一初始状态时,所述第二抵接部45与所述第一抵接部44抵接,使得所述机臂连接件1无法向其折叠的反方向继续转动。
60.其中在所述限位销42与所述限位部41接触过程的优选实施方式中,所述限位部41上可与所述限位销42接触的部分包括:
61.限位面411,当所述限位销42与所述限位部41在所述限位面411接触时,所述限位销42与所述限位部41配合锁定,所述限位销42处于第二初始状态;
62.滑动面412,当所述限位销42与所述限位部41在所述滑动面412接触时,所述限位销42可在所述滑动面412上发生相对滑动,所述限位销42处于滑动状态。
63.如图2中所示,当所述机臂受到的第一外力没消失时,所述限位销42受所述弹性部件43的拉力,并与所述限位部41接触,此时所述限位销42与所述限位部41上的所述滑动面412可滑动地接触;当所述机臂受到的第一外力消失后,所述机臂连接件1与所述主体连接件2恢复至第一初始状态,所述限位销42受所述弹性部件43的拉力,并恢复至第二初始状态,此时所述限位销42与所述限位部41上的所述限位面411接触,所述限位销42与所述限位部41共同将所述机臂连接件1与所述主体连接件2之间的相对位置锁定。综上,当所述机臂连接件1与所述主体连接件2自折叠状态恢复至第一初始状态过程中,所述限位销42自动恢复至第二初始状态,并将所述机臂连接件1和所述主体连接件2之间的相对位置锁定,方便了无人机取出后快速投入使用。
64.其中在所述限位面411的优选实施方式中,所述限位面411与所述弹性部件43伸缩方向成第二设定角度,使得所述限位销42受到所述弹性部件43的拉力恢复至第二初始状态时,所述限位销42向所述限位面411施加压力,所述压力在竖直方向上有分量。
65.实际制造中,所述机臂连接件1在所述铰接轴10处的开孔很可能稍大于所述铰接轴,导致所述机臂连接件1在与所述主体连接件2连接后会产生晃动;另一方面,由于制造误
差,当所述第一抵接部44与所述第二抵接部45之间的接触面有夹角时,造成所述第一抵接部44与所述第二抵接部45之间接触面积较小,同样会导致所述机臂连接件1在与所述主体连接件2连接后会产生晃动。将所述限位面411设置成与所述弹性部件43伸缩方向成第二设定角度,此时,当所述限位销42受到所述弹性部件43的拉力恢复至第二初始状态后,所述限位销42与所述限位面411抵接,并向所述限位面411施加压力,由于所述压力在竖直方向上有分量,进而所述机臂连接件1受到所述压力的竖直分力后,其在所述铰接轴10处的开孔的底部与所述铰接轴10接触,同时若所述第一抵接点44与所述第二抵接点45之间的接触面有夹角而造成所述第一抵接部44与所述第二抵接部45之间接触面积较小时,在所述压力的竖直分力的作用下,所述第一抵接部44与所述第二抵接部45之间夹角被消除。综上,将所述限位面411设定为与所述弹性部件43成所述第二设定角度,使得在所述机臂连接件1与所述主体连接件2之间在第一初始状态时,连接更加牢靠,无人机的操控更加精确,飞行更加稳定。
66.其中在所述滑动面412的优选实施方式中,所述滑动面412为圆滑曲面。
67.当所述机臂受到的第一外力没消失时,所述限位销42受所述弹性部件43的拉力,并与所述限位部41接触,此时所述限位销42与所述限位部41上的所述滑动面412可滑动地接触;将所述滑动面412设置为圆滑曲面,便于在所述第二外力消失后,当所述机臂连接件1与所述主体连接件2在折叠状态并不断向不同方向变换角度时,所述限位销42与所述限位部41之间的相对滑动更加平稳。方便无人机的快速放置和取出。
68.其中在所述回弹部件3和所述弹性部件43的安装方式的优选实施方式中,所述回弹部件3可拆卸的连接于所述机臂连接件1和所述主体连接件2之间;
69.所述弹性部件43可拆卸的连接于所述主体连接件2上。
70.所述回弹部件3与所述机臂连接件1、所述回弹部件3与所述主体连接件2之间的连接方式为可拆卸连接,方便于对所述回弹部件3的更换;
71.同理,所述弹性部件43与所述主体连接件2的连接方式为可拆卸连接,方便于对所述弹性部件43的更换。
72.如图3中所示,优选地,所述无人机机臂折叠结构中包括两个所述主体连接件2,且两个所述主体连接件2通过所述铰接轴10对称的设于所述机臂连接件1的两侧,所述限位销42贯穿于两个所述主体连接件2上的所述调节孔21,所述弹性部件43有两个且一端分别与两个所述主体连接件2连接,另一端分别与所述限位销42的两端连接;所述回弹部件3有两个且一端分别与两个所述主体连接件2连接,另一端连接于所述机臂连接件1的两侧。通过设置两个所述主体连接件2,对所述机臂连接件1形成夹持,使得所述机臂连接件1与所述主体连接件2之间的连接更加紧实。无人机在各状态下更加稳定。
73.实施例2
74.本实施例提供一种无人机,其特征在于:包括无人机主体,若干机臂,以及与所述机臂配合的如权利要求1-7任意一项所述的无人机机臂折叠结构,所述无人机机臂折叠结构沿所述无人机主体周向设置。
75.将若干所述无人机机臂折叠结构和与其配合的所述机臂沿所述无人机主体周向设置,可使无人机在飞行时周向受力更加均匀,飞行更加稳定。
76.其中在机臂上安装电机的优选实施方式中,所述机臂上设有电机安装座5,所述电机安装座5为多个,且所述电机安装座5尺寸可调节。
77.所述机臂上设置的所述电机安装座5用于安装电机;一个机臂上设置多个所述电机安装座5,即可同时安装多个电机,以增加无人机飞行的速度和可操控性。优选地,所述电机安装座5设于所述机臂的上下两侧。所述电机安装座5尺寸可调节,用以适配不同大小的电机,同时便于对电机的更换。
78.其中在机臂长度调节的优选实施方式中,所述机臂上设有可伸缩结构,所述可伸缩结构设于所述无人机机臂折叠结构与所述电机安装座5之间。
79.在所述无人机机臂折叠结构与所述电机安装座5之间设置可伸缩结构,可根据具体需要调整所述机臂的长度。
80.以上描述仅为本技术的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本技术中所涉及的申请范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述申请构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本技术中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。