1.本发明属于四旋翼无人机领域,具体涉及一种垂面栖停四旋翼无人机。
背景技术:
2.微小型四旋翼无人机(mav)是当下的研究热点,在军事、民用、科研等领域获得广泛应用。民用领域中,mav可以承担区域监控、数据采集、航空拍摄等任务。军事领域中,mav装备于班组或单兵,用于战场侦查监视或者打击。科研领域中,mav的研发涉及总体设计、飞行控制、mems技术、导航技术等多个领域,是多科学融合研究的一个理想平台。mav以其轻小便携、强机动性等优势获得广泛关注,但尺度减小带来储能空间的急剧减缩,引发了续航时间缩短、使用效能恶化的严重问题。因此,提升mav续航时间成为当下的一个研究热点。
3.垂面栖停策略是当前解决mav续航问题的一个有效手段,栖停策略的灵感来源于鸟类栖落行为,是通过在无人机上加装模仿动物肢体的栖停装置,赋予无人机在线缆或者建筑物壁面栖附的能力。无人机栖附时仅借助外部作用力克服重力,无需驱动螺旋桨,可以达到降低能耗、延长有效任务时间的目的。
4.cn209700959u专利公开了一种基于仿生原理的固定翼无人机栖息装置,包括装置安装座与爪座,可在复杂地形下如屋顶,树枝进行栖息,该装置由多个连杆与伺服驱动器构成。cn111169628a公开了一种旋翼无人机天花板栖息机构,包括旋翼无人机和栖息部件,旋翼无人机可以通过栖息部件携带的柔性粘附件粘附并停留在天花板上,延长旋翼无人机的续航时间。
5.现有四旋翼无人机的栖停装置主要面向线缆或垂直墙壁,采用机械抓附或者粘附材料吸附。从装置设计角度来看,大多采用设计并未利用无人机的机动能力,而是单纯借助伺服驱动连杆的方式来获得抓附作用力。这样的机构设计较为复杂,零部件较多,虽然能够实现无人机栖停,但是,也增加了无人机的结构重量,一定程度上降低了无人机的机动性与飞行时间。
技术实现要素:
6.要解决的技术问题:
7.为了避免现有技术的不足之处,本发明提出一种垂面栖停四旋翼无人机,克服了传统垂面栖停四旋翼无人机的机构设计较为复杂、零部件较多的不足。该无人机由四旋翼无人机和栖停装置两部分组成,无人机通过俯仰机动将栖停装置朝向垂面,栖停装置能够实现无人机在近壁面时刻的壁面抓附。
8.本发明的技术方案是:一种垂面栖停四旋翼无人机,其特征在于:包括四旋翼无人机和垂面栖停装置,所述垂面栖停装置固定安装于四旋翼无人机的机身下方;
9.所述四旋翼无人机采用x布局,四个电机布置于机臂的四个端部,电机与电子调速器连接,用于进行推力控制;
10.所述垂面栖停装置包括悬臂爪、拉伸弹簧、松弛牵引线、舵机组件;所述悬臂爪为l
型钩爪结构,上端通过轴与无人机机身铰接,下端为钩爪;四个悬臂爪中两个为一组,两组对称设置于无人机机身下方的前、后部,且钩爪相对设置;设置于前部的两个悬臂爪为前侧栖停装置悬臂爪,设置于后部的两个悬臂爪为后侧栖停装置悬臂爪;两个前侧栖停装置悬臂爪中部通过前侧弹簧悬挂横梁连接,两个后侧栖停装置悬臂爪通过后侧弹簧悬挂横梁连接;所述拉伸弹簧的两端的分别固定于前、后侧弹簧悬挂横梁的中部,通过拉伸弹簧的回弹力增加悬臂爪对壁面的作用力;所述舵机组件安装与无人机机身的下方中部,包括舵机、舵机输出轴和舵机摇杆;所述松弛牵引线的一端与两个前侧栖停装置悬臂爪的背面连接,另一端依次穿过设置于无人机机身底部的引导轮、舵机组件与两个后侧栖停装置悬臂爪的背面连接;通过舵机控制松弛牵引线,进而将前、后侧栖停装置悬臂爪沿展向拉开,消除悬臂爪对壁面的作用力。
11.本发明的进一步技术方案是:所述前侧栖停装置悬臂爪、后侧栖停装置悬臂爪分别通过相互平行设置的前侧栖停装置安装轴、后侧栖停装置安装轴与无人机机身的相对两侧面铰接,铰接位置位于无人机机身两侧面的中部。
12.本发明的进一步技术方案是:所述无人机机身上对称安装有两个引导轮,分别为前侧松弛牵引线引导轮和后侧松弛牵引线引导轮,前侧松弛牵引线引导轮安装于两个前侧栖停装置悬臂爪之间中点的上方,后侧松弛牵引线引导轮安装于两个后侧栖停装置悬臂爪之间中点的上方,用于松弛牵引线的导向作用。
13.本发明的进一步技术方案是:所述四旋翼无人机包括机架、接收机、动力系统、感知系统、控制系统和能源系统。
14.本发明的进一步技术方案是:所述机架为碳纤维片或者其他类似功能材料,用于无人机结构定型和承力,还用于搭载电机、传感器、飞控板、电池各类元器件。
15.本发明的进一步技术方案是:所述接收机用于接受来自遥控器或者地面站的指令信号。
16.本发明的进一步技术方案是:所述动力系统包含四组安装于机架的电机和螺旋桨,电子调速器通过调节电机转速来调节螺旋桨推力,进而实现对无人机的运动控制。
17.本发明的进一步技术方案是:所述感知系统包括距离传感器、姿态传感器、gps传感器和摄像头,负责获取无人机的位置信息与姿态信息,由于栖停过程无人机经历较大的俯仰角变化,因此,为获得准确的无人机实时运动信息,需要在无人机的上、下以及侧方布置多个、多类型传感器。
18.本发明的进一步技术方案是:所述控制系统包括微处理器和飞控组件,能够读取接收机指令、预设轨迹信息以及传感器的量测数据,该数据用于生成无人机当前的误差信号并进一步通过控制算法处理,生成电机的控制指令。
19.本发明的进一步技术方案是:所述能源系统为电机供电,通常安装在机架上方,使用魔术扣或者卡子等方式固定于机架。
20.有益效果
21.本发明的有益效果在于:本发明提供一种垂面栖停四旋翼无人机,可以在空中与栖停两种模态进行切换,能够有效延长无人机的任务时间,同时,所述对爪式栖停装置机构设计较为简单、零部件数量少,结构重量小,能够提升无人机与栖停装置的协同增益。
22.无人机在执行垂面栖停过程中,利用飞行器在末端的速度冲击垂面,当无人机在
与垂面接触的时刻,栖停装置与壁面相互作用,前侧栖停装置悬臂爪、后侧栖停装置悬臂爪向两侧展开,拉伸弹簧向外拉伸,冲击能量被消耗并转化为弹性势能。当冲击过程结束,拉伸弹簧收紧,牵引前、后侧栖停装置悬臂爪挤压壁面微小凸起,摩擦力伴随挤压作用力产生,无人机在支持力与摩擦力作用下实现受力平衡。
23.当无人机解除栖停时,舵机拖曳前后的牵引线,将前、后侧栖停装置悬臂爪向两侧继续展开接近平直,同时将拉伸弹簧向外伸展;此时,前、后侧栖停装置悬臂爪不再挤压壁面微小凸起,摩擦力消失,无人机与壁面的相互作用力消失,无人机在自身重力作用力开始下落并开启电机恢复至飞行状态。
24.上述过程表明,本发明提出的四旋翼无人机栖停装置能够有效利用无人机在栖停末端的冲击过程,利用扭转弹簧吸收冲击能量,仅在飞行器解除栖停时启动伺服驱动器,一方面,在接触过程中,能够借助被动展开方式有效的吸收冲击能量,降低冲击强度,提供成功几率。另一方面,机械结构设计更为简单,仅有两组连杆和一个伺服驱动器,且伺服驱动器仅在结束栖停时发挥作用,系统功耗更低。
附图说明
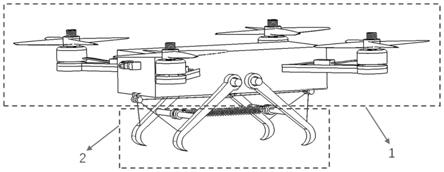
25.图1为本发明的垂面栖停四旋翼无人机的立体装配图;
26.图2(a)为本发明的四旋翼无人机的立体装配图;
27.图2(b)为本发明的四旋翼无人机的侧视装配图;
28.图2(c)为本发明的四旋翼无人机的俯视装配图;
29.图3(a)为本发明的垂面栖停装置的立体装配图;
30.图3(b)为本发明的垂面栖停装置的正视装配图;
31.图3(c)为本发明的垂面栖停装置的侧视装配图;
32.图4为本发明的四旋翼无人机的垂面栖停机动过程示意图;
33.图5为本发明的垂面栖停装置的栖停原理示意图;
34.图6为本发明的垂面栖停装置的释放复飞示意图;
35.附图标记说明:1:四旋翼无人机,2:垂面栖停装置,3-1:旋翼桨叶,3-2:电机输出轴,3-2:电机,4-1:电机安装座,4-2:旋翼机臂,5:无人机机身,6:电子调速器,7-1:前侧栖停装置安装轴,7-2:后侧栖停装置安装轴,8-1:前侧栖停装置悬臂爪,8-2:后侧栖停装置悬臂爪,9:拉伸弹簧,10-1:前侧松弛牵引线,10-2:后侧松弛牵引线,11-1:前侧弹簧悬挂横梁,11-2:后侧弹簧悬挂横梁,12-1:前侧松弛牵引线引导轮,12-2:后侧松弛牵引线引导轮,13-1:舵机,13-2:舵机输出轴,13-3:舵机摇杆。
具体实施方式
36.下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
37.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特
定的方位构造和操作,因此不能理解为对本发明的限制。
38.本发明一种垂面栖停四旋翼无人机的总体装配如图1所示,包括四旋翼无人机1和栖停装置2。所述垂面栖停装置2固定安装于四旋翼无人机1的机身下方;四旋翼无人机1采用x布局,四个电机3-3布置于旋翼机臂4-2的四个端部,电机3-3与电子调速器6连接,用于进行推力控制;
39.所述四旋翼无人机1包括机架、接收机、动力系统、感知系统、控制系统和能源系统。所述机架为碳纤维片或者其他类似功能材料,用于无人机结构定型和承力,还用于搭载电机、传感器、飞控板、电池等各类元器件。所述接收机用于接受来自遥控器或者地面站的指令信号。所述动力系统包含四组安装于机架的电机和螺旋桨,电子调速器通过调节电机转速来调节螺旋桨推力,进而实现对无人机的运动控制。所述感知系统负责获取无人机的位置信息与姿态信息,由于栖停过程无人机经历较大的俯仰角变化,因此,为获得准确的无人机实时运动信息,需要在无人机的上、下以及侧方布置多个、多类型传感器。所述控制系统可以读取接收机指令、预设轨迹信息以及传感器的量测数据,该数据用于生成无人机当前的误差信号并进一步通过控制算法处理,生成电机的控制指令。所述能源系统为电机供电,通常安装在机架上方,使用魔术扣或者卡子等方式固定于机架。
40.参照图2(a)-(c)所示,以单个电机为例进行动力系统说明,动力系统包括螺旋桨3-1、电机输出轴3-2、电机3-3和电子调速器6,旋翼桨叶3-1有电机3-3控制绕电机输出轴3-2进行旋转。电子调速器6靠近机身5一侧的连接线连接飞控板和电池,用于接收飞控传来的推力控制信号;电子调速器6靠近电机3c一侧输出电压控制电机转速。飞控板自身能够运行控制算法,该硬件上有电调接口、接收机接口、传感器接口等以及微型处理器等元器件,用于接受遥控器信号或传感器信号,执行内嵌的控制算法并通过输出端口输入到电调,对电机推力进行调节。无人机的传感器负责感知无人机的位置、速度、姿态角等信息,该信息输入到飞控板中用于进行反馈控制。
41.参照图3(a)-(c)所示,所述垂面栖停装置2包括悬臂爪、拉伸弹簧9、松弛牵引线、舵机组件;所述悬臂爪为l型钩爪结构,其上方是环形结构,下方是钩爪;四个悬臂爪中两个为一组,两组对称设置于无人机机身5下方的前、后部,且钩爪相对设置;设置于前部的两个悬臂爪为前侧栖停装置悬臂爪8-1,设置于后部的两个悬臂爪为后侧栖停装置悬臂爪8-2;前侧栖停装置悬臂爪8-1、后侧栖停装置悬臂爪8-2分别通过相互平行设置的前侧栖停装置安装轴7-1、后侧栖停装置安装轴7-2与无人机机身5的相对两侧面铰接,铰接位置位于无人机机身5两侧面的中部。
42.两个前侧栖停装置悬臂爪8-1中部通过前侧弹簧悬挂横梁11-1连接,两个后侧栖停装置悬臂爪8-2通过后侧弹簧悬挂横梁11-2连接;所述拉伸弹簧9的两端的分别固定于前、后侧弹簧悬挂横梁的中部,通过拉伸弹簧9的回弹力增加悬臂爪对壁面的作用力;
43.所述舵机组件安装与无人机机身5的下方中部,包括舵机13-1、舵机输出轴13-2和舵机摇杆13-3;无人机机身5上对称安装有两个引导轮,分别为前侧松弛牵引线引导轮12-1和后侧松弛牵引线引导轮12-2,前侧松弛牵引线引导轮12-1安装于两个前侧栖停装置悬臂爪8-1之间中点的上方,后侧松弛牵引线引导轮12-2安装于两个后侧栖停装置悬臂爪8-2之间中点的上方。所述松弛牵引线的一端与两个前侧栖停装置悬臂爪的背面连接,另一端依次穿过设置于无人机机身底部的前侧松弛牵引线引导轮12-1、舵机组件、后侧松弛牵引线
引导轮12-2与两个后侧栖停装置悬臂爪8-2的背面连接;通过舵机13-1控制松弛牵引线,进而将前、后侧栖停装置悬臂爪沿展向拉开,消除悬臂爪对壁面的作用力。
44.无人机栖停机动过程如图4所示,无人机由平飞转入机动飞行,不断增大自身的俯仰角并减小飞行速度,在传感器和飞控系统协调作用下,无人机在接触垂面时刻保证俯仰角为90度且具有合适的冲击速度。
45.当无人机以一定的速度冲击壁面时,四旋翼无人机1向下压迫垂面栖停装置2。前侧栖停装置悬臂爪8-1和后侧栖停装置悬臂爪8-2分别绕安装轴7-1和安装轴7-2转动,靠近垂面的钩爪沿垂面向外侧展开,固连在前、后侧悬臂爪的弹簧悬挂横梁11-1和11-2也向外侧运动,使得拉伸弹簧9长度增加,产生指向装置内侧的弹力,这个弹力使得悬臂爪与垂面的微小突起相互作用,产生垂直当地曲率的支持力和沿切向的摩擦力。前、侧悬臂梁钩爪在垂面微小突起上产生的支持力和摩擦力能够平衡无人机的重力和由于重心在垂面之外所产的力矩。
46.当无人机解除栖停时,舵机13-1拖曳前、后侧松弛牵引线10-1、10-2并将拉伸弹簧9向外伸展,此时,前侧栖停装置悬臂爪8-1和后侧栖停装置悬臂爪8-2不在挤压壁面微小凸起,摩擦力消失,无人机与壁面的相互作用力消失,无人机在自身重力作用力开始下落并开启电机恢复至飞行状态。
47.本发明提出的四旋翼无人机栖停装置能够有效利用无人机在接触时刻的冲击能量,利用扭转弹簧吸收冲击能量并将其转化为抓附作用力,仅在飞行器解除栖停时启动伺服驱动器。一方面,在接触过程中,能够借助被动展开方式抵消冲击强度,提供成功几率。另一方面,机械结构设计更为简单且更加节能仅有两组连杆和一个伺服驱动器,且伺服驱动器仅在结束栖停时发挥作用,系统功耗更低。
48.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。