1.本发明涉及一种新型无人机。
背景技术:
2.现有的传统多旋翼无人机(如四旋翼、六旋翼、八旋翼无人机)基本为对称布局,储存箱体通常长度宽度几近相等,占地面积大,也不利于在有限空间起降并捕获回收。
3.多旋翼无人机为实现长航时大载重需要利用油动发动机提供动力,由于旋翼数量众多机械传动复杂,因而通常采用油电混合方式,即利用油动发动机发电,然后,再利用电能驱动螺旋桨转动,上述过程中,燃油热能转化为电能的转化效率低,能量损失严重,效率远远不如发动机直接驱动旋翼的直升机;然而,直升机机械结构复杂,安全隐患远远大于多旋翼无人机。
4.申请人于2021年04月12日提交了一项中国实用新型专利,专利名称为:一种创新型立式垂直起降固定翼无人机(申请号为:2021207430684),其主翼设置在机体的尾部两侧,无人机的副翼和螺旋桨分别设置在主翼的后侧和前侧,在无人机起降过程中,当无人机尾部与地面接近时,气流受到地面阻挡,影响了副翼对气流的偏折控制,继而导致无人机姿态控制低效,严重影响控制稳定性;进一步地,副翼设置在主翼后侧,其在平飞过程中,产生负升力,从而使得无人机的整体气动效率低,影响了无人机载重及续航能力;申请人于2021年07月01日提交了一项中国实用新型专利,专利名称为:一种无人机自动收放基站(申请号为:2021214918974);其主要包括箱体、起降机构和主动捕获装置,箱体用于存放无人机,起降机构用于主动捕获装置在箱体内的升降,主动捕获装置主要是实现上述无人机的收放捕获;当无人机起降时,为防止无人机尾部的副翼或螺旋桨与箱体侧壁发生碰撞,在起降之前,需要利用起降机构将主动捕获装置升起到高出箱体顶部,然后,再进行无人机的发射或降落捕获,上述箱体中的起降机构及主动捕获装置结构及控制过程复杂。
技术实现要素:
5.本发明的目的在于提供一种新型无人机,其可一机多用,既可作为旋翼无人机使用,也可当垂直起降固定翼无人机使用;
6.在当旋翼无人机使用时,因其只有机身两侧鸭翼及螺旋桨,呈扁平构造,储存箱体狭长占地空间小,如果储存箱体同时作为起降回收捕获平台,可以在有限空间实现全自主起降回收,具有重大实用价值。同时,为提高航时及载重能力,可以用两只油动发动机直接驱动鸭翼两侧的螺旋桨,机械结构简洁可靠,与油发电方式相比能量效率大大提高。
7.在当垂直起降固定翼无人机使用时,该无人机的副翼和螺旋桨均设置在机体前部两侧鸭翼上,从而在无人机起降时,可保证副翼和螺旋桨均与地面保持一定的距离;起降过程中,副翼和螺旋桨与地面相距较远,有效降低了地面对气流的阻挡作用,继而有利于提高副翼和螺旋桨对无人机姿态控制效果,从而可提高无人机起降稳定性;无人机起降稳定性得到提高,继而便于后续进行无人机捕获机构及相关控制程序的简化设计。
8.本发明解决其技术问题所采取的技术方案是:一种新型无人机,包括机体,在所述机体的前部左右两侧各设置一鸭翼,在所述鸭翼的后侧设置有副翼,在所述鸭翼的前侧设置有无人机飞行用螺旋桨。
9.优选地,在所述机体的后部左右两侧各设置一主翼,在所述机体的后部上侧设置有至少一个垂直翼。
10.优选地,所述主翼包括固定主翼和可折叠主翼,所述可折叠主翼通过一第一驱动机构能够实现向机体腹部方向进行自动摆动折叠收起并固定,且能够实现自动展开并固定;所述垂直翼包括固定垂直翼和可折叠垂直翼,所述可折叠垂直翼通过一第二驱动机构能够实现向主翼方向进行自动摆动折叠收起并固定,且能够实现自动展开并固定。
11.进一步地,所述可折叠主翼和固定主翼的对接处下侧通过至少一个阻尼铰链实现铰接连接,所述第一驱动机构设置在可折叠主翼和固定主翼的对接处设置;所述固定垂直翼和可折叠垂直翼的对接处外侧,通过至少一个阻尼铰链实现铰接连接,所述第二驱动机构设置在固定垂直翼和可折叠垂直翼的对接处。
12.进一步地,所述第一驱动机构包括第一舵机,所述第一舵机的第一舵机臂与可折叠主翼的下侧壁固定连接;所述第二驱动机构包括第二舵机,所述第二舵机的第二舵机臂与所述可折叠垂直翼的外侧壁固定连接。
13.优选地,所述主翼包括固定主翼和可折叠主翼,所述可折叠主翼能够通过手动方式实现向机体腹部方向进行摆动折叠收起,且能够通过一第一连接机构实现展开固定;所述垂直翼包括固定垂直翼和可折叠垂直翼,可折叠垂直翼能够通过手动方式实现向主翼方向进行摆动折叠收起,且能够通过一第二连接机构实现展开固定,在所述机体的腹部设置一能够自动实现摆动的支撑杆。
14.进一步地,所述可折叠主翼和固定主翼的对接处下侧通过至少一个阻尼铰链实现铰接连接,第一连接机构包括至少一个第一搭扣,所述第一搭扣设置在所述可折叠主翼和固定主翼对接处的上侧;所述固定垂直翼和可折叠垂直翼的对接处外侧,通过至少一个阻尼铰链实现铰接连接,第二连接机构包括至少一个第二搭扣,所述第二搭扣设置在所述固定垂直翼和可折叠垂直翼对接处内侧。
15.优选地,所述主翼为一整体不可折叠部件,在所述机体的腹部设置一能够自动实现摆动的支撑杆,起飞降落时打开提供支撑,平飞时收起贴到机腹部。
16.本发明的有益效果是:
17.1、当该新型无人机采用没有主翼和垂直翼的设计方案进行实施后,即该无人机充当旋翼无人机使用,因为只有两个呈一字形分布的螺旋桨,使得其无人机的厚度较窄,继而便于实现无人机在箱体内回收,对应的箱体结构尺寸狭窄,从而也便于箱体的运输及携带。进一步地,如果采用两个油动发动机直接驱动螺旋桨,与直升机相比机械机构简洁可靠,与油发电方式相比能量效率大大提高;
18.2、在传统的鸭翼布局固定翼飞机上,副翼设置在主翼上,其在平飞过程中,产生向下的负升力保持俯仰气动平衡,从而降低了升力效率,影响无人机的载重及续航能力;而本无人机用作固定翼无人机使用时,其副翼设置在鸭翼上,其在平飞过程中,鸭翼和主翼均产生正升力,从而有效提高平飞时的升力效率,增加负载及续航能力。
19.3、本无人机用作垂直起降固定翼无人机使用时,本无人机的副翼和螺旋桨均设置
在机体头部两侧的鸭翼上,继而在无人机起降时,可使得副翼和螺旋桨均与地面保持一定的距离,从而可有效降低地面对气流的阻挡作用,继而提高副翼和螺旋桨对气流的控制效果,从而提高无人机在起降过程中的稳定性;无人机起降过程中的稳定性得到提高,继而便于实现无人机的精准、稳定降落;无人机能够精准、稳定降落,从而便于后续进行无人机捕获机构及相关控制程序的简化设计。
20.4、本无人机用作垂直起降固定翼无人机使用时,无人机的垂直翼和主翼能够折叠,减小了无人机的存放占用空间,便于无人机的携带及运输,也利于减小用于无人机起降的箱体结构尺寸。
21.5、本无人机用作垂直起降固定翼无人机使用时,无人机的垂直翼和主翼能够自动实现折叠,从而大幅减小无人机起降过程中受风面积,提高抗风性能,有利于增加控制安定性及实现精准降落捕获。
附图说明
22.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的部分优选实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
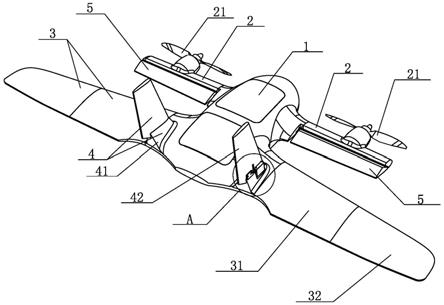
23.图1为无人机上的主翼和垂直翼具有自动折叠功能的一种实施例,在平飞时的整体结构示意图;
24.图2为无人机上的主翼和垂直翼具有自动折叠功能的一种实施例,在平飞时的整体结构侧视图;
25.图3为无人机上的主翼和垂直翼具有自动折叠功能的一种实施例,在箱体内起降过程中的折叠状态示意图;
26.图4为无人机上的主翼和垂直翼具有自动折叠功能的一种实施例,在地面上起降过程中的折叠状态示意图;
27.图5为图1中a处放大图;
28.图6为图2中b处放大图;
29.图7为无人机上的主翼和垂直翼采用手动折叠的一种实施例,在平飞时的整体结构示意图;
30.图8为无人机上的主翼和垂直翼采用手动折叠的一种实施例,在平飞时的整体结构侧视图;
31.图9为无人机上的主翼和垂直翼采用手动折叠的一种实施例,在垂直起降时的状态示意图;
32.图10为图7中c处放大图;
33.图11为图7中d处放大图;
34.图12为图7中e处放大图;
35.图13为图8中f处放大图;
36.图14为无人机上的主翼和垂直翼均不能折叠的一种实施例的整体结构示意图;
37.图15为无人机不带主翼和垂直翼的一种实施例的整体结构示意图;
38.图16为无人机只带垂直翼而没有主翼时的一种实施例,在地面上起降时的结构示意图;
39.图17为无人机只带垂直翼而没有主翼时的一种实施例在垂飞过程中的结构示意图;
40.图18为无人机的主翼采用插接方式与机体连接的一种实施例的结构示意图;
41.图中:1机体、2鸭翼、21螺旋桨、3主翼、31第一固定主翼、311第一凹槽、32第一可折叠主翼、321第二凹槽、33第二固定主翼、34第二可折叠主翼、35不可折叠主翼、36第三主翼、4垂直翼、41第一固定垂直翼、411第三凹槽、42第一可折叠垂直翼、421第四凹槽、43第二固定垂直翼、44第二可折叠垂直翼、45不可折叠主翼、46第三垂直翼、47第四垂直翼、5副翼、6第一舵机、61第一舵机臂、7第二舵机、71第二舵机臂、8第一支撑杆、9第二支撑杆、10第三支撑杆、101第一阻尼铰链、102第二阻尼铰链、201第一搭扣、202第二搭扣、301捕获机构、401支撑十字架。
具体实施方式
42.下面将结合具体实施例及附图1-18,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分优选实施例,而不是全部的实施例。本领域技术人员可以在不违背本发明内涵的情况下做类似变形,因此本发明不受下面公开的具体实施例的限制。
43.本发明提供了一种新型无人机,包括机体1,在所述机体1的前部左右两侧各设置一鸭翼2,在所述鸭翼2的后侧设置有副翼5,在所述鸭翼2的前侧设置有无人机飞行用螺旋桨21,鸭翼2具体结构及设计方法均为本领域公知常识,故在此,对于鸭翼2在机体1上的设置实施方式不再做详细介绍;副翼5的设置及摆动控制均为本领域内成熟技术,故在此,对于副翼5在鸭翼2上的具体设置方式及飞控系统对副翼5的摆动控制方式不再做详细介绍;螺旋桨21是为无人机飞行领域常用的部件,其高速转动为无人机飞行提供所需动力,与螺旋桨21相配合的动力总成,及动力总成在鸭翼2上的具体安装方式均为本领域内公知技术,在此,不再做详细描述。
44.在实际应用中,本无人机可一机多用,既可作为旋翼无人机使用,也可当垂直起降固定翼无人机使用。当无人机充当旋翼无人机使用,因为只有两个呈一字形分布的螺旋桨21,使得其无人机的厚度较窄,继而便于实现无人机在箱体内回收,对应的箱体结构尺寸狭窄,从而也便于箱体的运输及携带。进一步地,如果采用两个油动发动机直接驱动螺旋桨21,与直升机相比机械机构简洁可靠,与油发电方式相比能量效率大大提高。当无人机充当垂直起降固定翼无人机使用时,副翼5和螺旋桨21均设置在机体1头部两侧的鸭翼2上,继而在无人机起降时,可使得副翼5和螺旋桨21均与地面保持一定的距离,从而可有效降低地面对气流的阻挡作用,继而提高副翼5和螺旋桨21对气流的控制效果,从而提高无人机在起降过程中的稳定性;无人机起降过程中的稳定性得到提高,继而便于实现无人机的精准、稳定降落;无人机能够精准、稳定降落,从而便于后续进行进行无人机捕获机构及相关控制程序的简化设计;进一步地,副翼5设置在鸭翼2上,其在平飞过程中,鸭翼2和主翼均产生正升力,从而有效提高平飞时的升力效率,增加负载及续航能力。
45.在本无人机当做旋翼无人机使用时,其具有两种实施例,一种实施例(如图15所
示)的具体实施方式为:机体1的后部没有主翼和垂直翼,只有一个支撑十字架401,支撑十字架401与机体1为固定连接,在起降过程中,利用支撑十字架401的支撑,实现机体1在地面上的稳定起降。另一种实施例(如图16和17所示)的具体实施方式为:机体1的后部设置有至少一个第三垂直翼46,在机体1的腹部设置一能够自动实现摆动的第三支撑杆10,第三支撑杆10在无人机进行降落或在地面上起飞时,自动向机腹外侧展开,以便在地面上与第三垂直翼46联合实现对无人机的支撑,在无人机垂飞过程中,第三支撑杆10自动向机腹内侧收起(如图17所示),以便提高无人机在飞行过程中的稳定性,第三支撑杆10实现自动摆动的技术方案为本领域公知技术,故在此,对于驱动第三支撑杆10摆动的驱动机构的具体结构、工作方式及控制过程不再做详细描述。
46.在本无人机当做垂直起降固定翼无人机使用时,在机体1上设置有主翼和垂直翼,主翼和垂直翼在机体1上设置的一种具体实施例如图18所示,两个第四垂直翼47设置在机体1的后部两侧,两个第三主翼36采用插接方式与机体1后部对应位置进行插接连接;在上述实施例中,可将两个第三主翼36从机体1上拆下,从而可使得无人机直接当做旋翼无人机使用,使得无人机的应用较为灵活。
47.主翼和垂直翼也可采用与机体1为一整体部件的连接方式进行连接,在主翼和垂直翼均采用与机体1为一整体部件连接实施的基础上,主翼和垂直翼又具有如下具体组合结构形态:主翼具有折叠功能时,垂直翼具有折叠功能或不具有折叠功能;主翼不具有折叠功能时,垂直翼具有折叠功能或不具有折叠功能。
48.垂直翼和主翼能够折叠时,减小了无人机的存放占用空间,便于无人机的携带及运输,也利于减小用于无人机起降的箱体结构尺寸。在主翼和垂直翼均能够折叠的具体实施例中,其又包括两种具体实施例,一种具体实施例是,主翼和垂直翼均具有自动折叠功能;另一种具体实施例是,主翼和垂直翼均采用手动方式实现折叠功能。
49.主翼和垂直翼均具有自动折叠功能的具体实施例的具体实施方式为:所述主翼包括固定主翼和可折叠主翼,所述可折叠主翼通过一第一驱动机构能够实现向机体腹部方向进行自动摆动折叠收起并固定,且能够实现自动展开并固定;所述垂直翼包括固定垂直翼和可折叠垂直翼,所述可折叠垂直翼通过一第二驱动机构能够实现向主翼方向进行自动摆动折叠收起并固定,且能够实现自动展开并固定。具体的,如图1-6所示,主翼的具体实施方式为:所述主翼3包括第一固定主翼31和第一可折叠主翼32,所述第一可折叠主翼32通过一第一驱动机构能够实现向机体1腹部方向进行自动摆动折叠收起并固定,且能够实现自动展开并固定,具体的,所述第一可折叠主翼32和第一固定主翼31的对接处下侧通过至少一个阻尼铰链101实现铰接连接,所述第一驱动机构设置在第一可折叠主翼32和第一固定主翼31的对接处设置,所述第一驱动机构用于所述第一可折叠主翼32的转动驱动和固定,即当第一驱动机构带动第一可折叠主翼32折叠到位后,通过第一驱动机构的定位功能,可使得第一可折叠主翼32始终保持收起状态,其不会因外力作用而自动展开;当第一驱动机构带动第一可折叠主翼32展开到位后,通过第一驱动机构的定位功能,可使得第一可折叠主翼32始终保持展开状态,其不会因外力作用而进行摆动收起;通过第一驱动机构的上述驱动及定位功能,保证了第一可折叠主翼32的稳定展开及折叠,继而利于实现无人机姿态的精准控制;第一驱动机构的具体实施方式为:第一驱动机构为一第一舵机6,为便于实现第一舵机6在第一固定主翼31和第一可折叠主翼32对接处的安装,同时保证第一舵机6的安装
不影响第一可折叠主翼32的展开与折叠,在此,在第一固定主翼31的对应位置处设置一第一凹槽311,在第一可折叠主翼32的对应处设置一与第一凹槽311相对应的第二凹槽321,第一舵机6固定安装在第一凹槽311和第二凹槽321内,且使得第一舵机6的第一舵机臂61的转轴与相应的阻尼铰链101的转轴同轴,第一舵机臂61与阻尼铰链101同轴,从而可使得第一舵机臂61顺利带动第一可折叠主翼32围绕阻尼铰链101的轴心顺利转动,第一舵机臂61与第一可折叠主翼32的下侧壁固定连接,继而保证第一可折叠主翼32与第一舵机臂61进行同步转动,继而可实现第一可折叠主翼32的折叠与展开位置的精确控制。垂直翼的具体实施方式为:所述垂直翼4包括第一固定垂直翼41和第一可折叠垂直翼42,所述第一可折叠垂直翼42通过一第二驱动机构能够实现向主翼3方向进行自动摆动折叠收起并固定,且能够实现自动展开并固定;具体的,所述第一固定垂直翼41和第一可折叠垂直翼42的对接处外侧,通过至少一个阻尼铰链101实现铰接连接,所述第二驱动机构设置在第一固定垂直翼41和第一可折叠垂直翼42的对接处,所述第二驱动机构用于所述第一可折叠垂直翼42转动驱动和固定;即当第二驱动机构带动第一可折叠垂直翼42折叠到位后,通过第二驱动机构的定位功能,可使得第一可折叠垂直翼42始终保持收起状态,其不会因外力作用而自动展开;当第二驱动机构带动第一可折叠垂直翼42展开到位后,通过第二驱动机构的定位功能,可使得第一可折叠垂直翼42始终保持展开状态,其不会因外力作用而进行摆动收起;通过第二驱动机构的上述驱动及定位功能,保证了第一可折叠垂直翼42的稳定展开及折叠,继而利于实现无人机姿态的精准控制;第二驱动机构的具体实施方式为:第二驱动机构为一第二舵机7,为便于实现第二舵机7在第一固定垂直翼41和第一可折叠垂直翼42对接处的安装,同时保证第二舵机7的安装不影响第一可折叠垂直翼42的展开与折叠,在此,在第一固定垂直翼41的对应位置处设置一第三凹槽411,在第一可折叠垂直翼42的对应处设置一与第三凹槽411相对应的第五凹槽,第二舵机7固定安装在第三凹槽411和第五凹槽内,且使得第二舵机7的第二舵机臂71的转轴与相应的阻尼铰链101的转轴同轴,第二舵机臂71与阻尼铰链101同轴,从而可使得第二舵机臂71顺利带动第一可折叠垂直翼42围绕阻尼铰链101的轴心顺利转动,第二舵机臂71与第一可折叠垂直翼42的外侧壁固定连接,具体的,第二舵机臂71固定卡置在第一可折叠垂直翼42上设置的第四凹槽421内,第二舵机臂71与第一可折叠垂直翼42固定连接,继而保证第一可折叠垂直翼42与第二舵机臂71进行同步转动,继而可实现第一可折叠垂直翼42的折叠与展开位置的精确控制。
50.在上述第一可折叠主翼32和第一可折叠垂直翼42均具有自动折叠功能的实施例中,当无人机直接落入一箱体内的捕获机构301内时,则第一可折叠主翼32进行180度转动,第一可折叠垂直翼42进行90度转动,实现完全折叠,这样利于无人机进入箱体内,同时,也利于捕获机构301使得无人机保持竖立状态;当无人机直接落入到地面上时,第一可折叠垂直翼42保持展开不进行折叠,两个第一可折叠主翼32进行90度转动,无人机利用第一可折叠垂直翼42和两个第一可折叠主翼32的支撑,实现在地面上的竖立。第一可折叠主翼32和第一可折叠垂直翼42具有自动折叠功能,在无人机垂直起飞和垂直降落过程中,使得第一可折叠主翼32和第一可折叠垂直翼42处于折叠状态,可有效降低无人机的受风面积,提高抗风性能,有利于增加控制安定性及实现精准降落捕获。
51.主翼和垂直翼均采用手动方式实现折叠功能的具体实施例的具体实施方式为:所述主翼包括固定主翼和可折叠主翼,所述可折叠主翼能够通过手动方式实现向机体腹部方
向进行摆动折叠收起,且能够通过一第一连接机构能够实现展开固定;所述固定垂直翼和可折叠垂直翼,可折叠垂直翼能够通过手动方式实现向主翼方向进行摆动折叠收起,且能够通过一第二连接机构能够实现展开固定,在所述机体的腹部设置一能够自动实现摆动的支撑杆。具体的,如图7-13所示,主翼包括第二固定主翼33和第二可折叠主翼34,所述第二可折叠主翼34和第二固定主翼33的对接处下侧通过至少一个第二阻尼铰链102实现铰接连接,利用第二阻尼铰链102的转动连接功能,继而实现第二可折叠主翼34的转动,从而实现主翼的折叠功能;第一连接机构包括至少一个第一搭扣201,所述第一搭扣201设置在所述第二可折叠主翼34和第二固定主翼33对接处的上侧,利用第一搭扣201的连接固定功能,从而可保证第二可折叠主翼34与第二固定主翼33的稳定连接,使得主翼保持展开状态;垂直翼包括第二固定垂直翼43和第二可折叠垂直翼44,所述第二固定垂直翼43和第二可折叠垂直翼44的对接处外侧,通过至少一个第二阻尼铰链102实现铰接连接,通过第二阻尼铰链102的转动连接功能,则实现第二可折叠垂直翼44的转动,继而实现垂直翼的折叠功能;第二连接机构包括至少一个第二搭扣202,所述第二搭扣202设置在所述第二固定垂直翼43和第二可折叠垂直翼44对接处内侧,利用第二搭扣202的连接固定功能,从而可保证第二可折叠垂直翼44与第二固定垂直翼43的稳定连接,使得垂直翼保持展开状态;在上述实施例中,为保证无人机在降落到地面上及在地面上起飞时保持竖直状态,在此,在机体1的腹部设置一能够自动实现摆动的第一支撑杆8,第一支撑杆8的工作原理及实现形式和上述第三支撑杆10的工作原理及实现形式完全相同。在上述无人机实施例中,在无人机起飞前,利用第一搭扣201和第二搭扣202分别实现第二可折叠主翼34和第二可折叠垂直翼44的展开固定,利用第一支撑杆8实现无人机竖立支撑,然后,便可进行后续起飞操作;当需要将无人机收起时,先使得第一支撑杆8自动收起,然后,将第一搭扣201和第二搭扣202分别打开,再手动进行第二可折叠主翼34和第二可折叠垂直翼44的转动折叠收起。
52.在实际应用中,主翼也可为一整体不可折叠部件,当主翼为一整体不可折叠部件,为实现无人机在地面上保持竖立,在此,在机体1的腹部设置一能够自动实现摆动的第二支撑杆9,第二支撑杆9的工作原理及实现形式和上述第三支撑杆10的工作原理及实现形式完全相同。主翼为一整体不可折叠部件时,无人机的一种具体实施例的具体实施方式为:无人机的主翼和固定翼均不具有折叠功能,其结构形式如图14所示,具体的:无人机包括机体1,在所述机体1的前部左右两侧各设置一鸭翼2,在所述鸭翼2的后侧和前侧分别设置有副翼5和螺旋桨21,在所述机体1的后部左右两侧各设置一不可折叠主翼35,在所述机体1的后部上侧设置有至少一个不可折叠垂直翼45,第二支撑杆9设置在机体1腹部侧。
53.除说明书所述的技术特征外,均为本专业技术人员的已知技术。
54.以上所述结合附图对本发明的优选实施方式和实施例作了详述,但是本发明并不局限于上述实施方式和实施例,对于本技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干改进和变型,这些改进和变型也应视为本发明的保护范围。