1.本发明涉及微型扑翼飞行器领域,具体来说是一种可以实现滚转控制功能的高效传动扑翼机构设计。
背景技术:
2.近年来,随着微机电、仿生飞行器设计、3d打印等领域技术的快速发展,同时在精密制造业快速发展的背景下,各类微小型飞行器被不断提出并成为热点。相较于固定翼和旋翼式微型飞行器,微型扑翼飞行器在低雷诺数下具有较高的气动效率,在隐蔽性与仿生性等方面存在显著优势,因而具有很高的仿生研究价值与军事应用价值,成为微型飞行器发展的重要方向之一。
3.尽管微型扑翼飞行器得到了快速的发展,但当前微型扑翼飞行器在高效精准传动与控制方面还面临困难。目前公开的微型扑翼飞行器为实现平面往复拍动运动,保证左右拍动幅度对称,通常采用双曲柄双摇杆机构、单曲柄双摇杆机构、曲柄滑块加四连杆放大传动机构等设计方案,如专利“微型扑翼飞行器”(zl107416202a)、“一种基于单曲柄双摇杆机构的微型仿生扑翼飞行器”(zl109606675a)、“一种基于双翼差动及舵机重心变化实现高控制力矩产生的仿生扑翼微型飞行器”(zl112009682a)。这类飞行器的传动方法是将电机带动齿轮的旋转运动,转化为杆件结构的摆动运动实现往复拍动。上述方案在一定程度上实现了基本对称的拍动运动,但仍存在一些不足,如“微型扑翼飞行器”(zl107416202a)公开的双曲柄双摇杆机构,一方面由于曲柄摇杆结构的限制,设计传动角与输出角度反相关,难以同时获得较优拍动角与传力性能,另一方面两个大的曲柄齿轮导致机构体积较大,乃至重量增加。而如“一种基于单曲柄双摇杆机构的微型仿生扑翼飞行器”(zl109606675a)、“一种基于双翼差动及舵机重心变化实现高控制力矩产生的仿生扑翼微型飞行器”(zl112009682a)公开的单曲柄双摇杆机构以及曲柄滑块加四连杆放大传动机构,由于机构转动副较多,连接复杂,导致运动累计误差大,传动不够精确,难以维修等问题,同时与双曲柄双摇杆机构类似,高速传动下也不够平稳。
4.除高效精准的传动机构设计研究需要加强外,在飞行器控制方法方面也有待加强。仿生扑翼微型飞行器的主要模仿对象是自然界中的昆虫和蜂鸟,多采用无尾翼的构型。这类飞行器的飞行控制是通过控制翼的姿态实现的,在实际设计时主要通过控制翼面变形运动调整翼在前后拍动过程中的翼膜攻角从而产生变化的气动力和力矩实现。如专利“一种基于双翼差动及舵机重心变化实现高控制力矩产生的仿生扑翼微型飞行器”(zl112009682a)、“一种基于单曲柄双摇杆机构的微型仿生扑翼飞行器”(zl109606675a)、“一种仿生蜂鸟飞行器”(zl110329505a)。上述发明在实际执行过程中通常以拉动翼根弹性杆,借助翼根杆转动或翼根杆弹性变形的方式改变扑翼前后拍过程中拍动平面以及翼膜的张紧程度,进而实现扑翼拍动过程中前后拍攻角和翼膜形状的变化,造成左右翼气动力的差别并最终产生滚转力矩,实现飞行器的姿态控制。专利“一种基于双翼差动及舵机重心变化实现高控制力矩产生的仿生扑翼微型飞行器”(zl112009682a)以及“一种基于单曲柄双
摇杆机构的微型仿生扑翼飞行器”(zl109606675a)公开了一种微小型无尾扑翼飞行器,专利中将翼根弹性杆与底座可转动连接,通过舵机横向拉扯翼根弹性杆带动翼根杆绕顶端转动,使左右扑翼翼膜产生变形,从而两侧扑翼出现升力差,产生滚转力矩来控制机体滚转。上述方案在一定程度上实现小范围的滚转姿态控制,但由于扑翼翼根弹性杆转动角度有限,容易受舵机转动中心位置与翼根杆距离限制。
5.因此,随着微型扑翼飞行器的高速发展,对高效、精确的传动机构运动设计与更多样化的控制方式提出了更多的要求,需要提出一种具有控制功能兼具高效传动的扑翼机构。
技术实现要素:
6.本发明针对现有微型扑翼飞行器传动效率不高、传动精确不足的问题,同时为丰富微型扑翼飞行器的滚转控制方法,提出了一种具有滚转控制功能的高效传动扑翼机构。其中,传动通过曲柄滑块-斜齿轮传动机构实现。该机构一方面仍通过设计曲柄滑块机构来转化电机的转动运动为运动规律接近正弦运动的直线运动,同时结合斜齿轮运动稳定、精确的特点,引入斜齿轮进行传动、放大运动输出角度,实现了传动的高效、精确。除此之外,本发明通过扑翼的翼根杆平移控制设计,使需要滚转控制时扑翼产生更大幅度的翼膜变形以及攻角变化范围,大幅度增加了滚转力矩的变化范围,增强了控制舵效、复杂机动飞行控制能力。
7.所述一种具有滚转控制功能的高效传动扑翼机构包括固定机构、电机、减速器、传动机构以及滚转控制机构。
8.所述固定机构包括机架以及底座。所述机架为立体结构,包含有电机、减速组以及传动机构中的单层齿轮的安装孔。机架通过两端的铆钉、卡扣等与底座固定连接。所述底座为立体结构,包含有传动机构中的左斜齿轮、右斜齿轮、左翼杆以及右翼杆的安装孔。底座上表面设有滑槽,通过轴钉与传动机构的连杆、右斜齿轮配合。底座下部设计有安装点以便固定滚转控制机构的控制舵机。
9.所述电机固定安装在机架上,用于驱动传动机构转动,从而带动扑翼拍动,所述电机的电机轴与电机齿轮固定连接。
10.所述减速器包括电机齿轮以及减速齿轮。所述减速齿轮为同轴双层齿轮,双层齿轮直径不同,其中较大的一层齿轮与电机齿轮啮合,较小的一层齿轮与传动机构中的单层齿轮啮合。所述减速器将电机的高速旋转运动进行减速并放大电机输出扭矩以驱动传动机构及扑翼运动。
11.所述传动机构包括单层齿轮、连杆、左斜齿轮、右斜齿轮、左翼杆以及右翼杆。所述单层齿轮为带偏心孔的圆柱直齿轮,通过轴钉安装在底座上。所述连杆两端均带通孔,较厚一端通孔与单层齿轮的偏心孔通过轴钉连接形成转动副,较薄另一端通孔通过轴钉固定在右斜齿轮滑槽以及底座滑槽中,行程曲柄滑块机构,将单层齿轮的圆周运动转为连杆沿上述滑槽上的往复直线运动。所述左斜齿轮为圆柱斜齿轮,通过轴钉安装在底座上,与右斜齿轮以及左翼杆啮合传动。所述右斜齿轮为圆柱斜齿轮,其上表面开一水平滑槽,滑槽中心线与直径垂直,连杆可通过该滑槽带动右斜齿轮转动,右斜齿轮通过轴钉安装在底座上,与左斜齿轮以及右翼杆啮合传动。所述左、右翼杆结构相同,均为扑翼安装凸台与圆柱斜齿轮的
组合体,分别用于驱动左、右扑翼运动,其中扑翼安装凸台位于翼杆的外侧,用于固定扑翼横杆;圆柱斜齿轮位于翼杆的内侧,圆柱斜齿轮上的中心孔与底座对应安装孔位通过轴钉铆接,可绕该安装孔位自由转动,所述圆柱斜齿轮与对应侧的斜齿轮啮合传动,扑翼安装凸台位于翼杆另外一端,用于固定扑翼横杆。所述传动机构其传动原理为:当机构需要拍动运动时,给电机通电,带动电机齿轮转动,经减速器减速后驱动传动机构。单层齿轮转动带动连杆一端绕单层齿轮转轴转动,同时连杆另一端在底座滑槽以及右斜齿轮滑槽内做往复直线运动,带动右斜齿轮转动。通过设计曲柄滑块机构来转化电机的转动运动为运动规律接近正弦运动的直线运动。右斜齿轮与左斜齿轮、右翼杆的圆柱斜齿轮啮合,左斜齿轮与左翼杆的圆柱斜齿轮啮合传动,进行运动幅度的放大,该过程利用斜齿轮啮合运动稳定、精确的特点,实现了高效、精确的传动实现所需的高效、精确的拍动运动。
12.所述滚转控制机构包括左扑翼、右扑翼、控制舵机、翼根固定架。所述左、右扑翼均由柔性翼膜、横杆、竖杆以及斜杆组成,横杆、竖杆以及斜杆粘结在柔性翼膜上。横杆翼根端固定在传动机构中的左、右翼杆扑翼安装凸台上,竖杆上端与翼根固定架连接。所述控制舵机可带动扑翼竖杆实现整体左右水平移动。所述翼根固定架为一水平t型结构,t型结构两侧各有一圆孔,用于固定扑翼竖杆,t型结构中间延长端设安装孔与控制舵机舵机臂固连,扑翼竖杆可在控制舵机舵机臂带动下水平移动。飞行器不需要滚转力矩产生时,通过控制舵机控制左右扑翼竖杆的水平位置,左右扑翼柔性翼膜松弛程度相同。
13.所述一种具有滚转控制功能的高效传动扑翼机构滚转控制方法为:当飞行器需要产生向右滚转力矩时,控制舵机向右侧拉动翼根固定架,带动两个扑翼的竖杆整体向右水平移动,从而使得左侧扑翼柔性翼膜张紧,右侧扑翼柔性翼膜松弛。相较于舵机改变前的状态,左侧扑翼柔性翼膜张紧,攻角增加;右侧扑翼柔性翼膜放松,攻角减小;从而左侧扑翼升力增加,右侧扑翼升力减小,由于左侧扑翼和右侧扑翼升力作用点与重心不重合,产生向右滚转力矩。向左的滚转力矩产生方法与向左的滚转力矩产生方法相反。
14.所述一种具有滚转控制功能的高效传动扑翼机构的制作及安装过程为:
15.(1)将电机齿轮装在电机主轴上,电机与机架对应电机安装孔过盈配合。通过轴钉将减速齿轮、单层齿轮安装在机架对应孔位上,其中减速齿轮与电机齿轮、单层齿轮啮合,单层齿轮只与减速齿轮啮合。
16.(2)通过轴钉将分别将左斜齿轮、右斜齿轮、左翼杆、右翼杆安装在底座对应孔位上,其中左斜齿轮与左翼杆啮合传动,右斜齿轮与右翼杆啮合传动,左斜齿轮与右斜齿轮啮合传动。
17.(3)将连杆较厚一端通孔通过轴钉与单层齿轮的偏心孔安装配合。通过轴钉将连杆另一端与右斜齿轮滑槽、底座滑槽固定配合形成两个移动副。通过铆钉、卡扣等方式将机架与底座固定。
18.(4)制作柔性扑翼,将扑翼的横杆分别与左、右翼杆连接,将竖杆插入翼根固定架的t型头两侧安装端圆孔固定。
19.(5)通过螺钉等方式将控制舵机与机架控制舵机安装端固连后,将翼根固定架与控制舵机舵机臂通过螺钉固连。
20.本发明的优点在于:
21.1、一种具有滚转控制功能的高效传动扑翼机构,结构紧凑,质量轻,可以实现仿生
扑翼飞行器所需的拍动运动。
22.2、一种具有滚转控制功能的高效传动扑翼机构,采用曲柄滑块-斜齿轮放大机构,转动副更少,便于安装、维修,同时斜齿轮传动可以高效实现更加精确、平稳的拍动运动。
23.3、一种具有滚转控制功能的高效传动扑翼机构,通过控制翼根竖杆左右平移导致翼膜的变化幅度更大,增大了滚转力矩的变化区间及其控制舵效,从而使得扑翼飞行器的控制效果、抗扰动能力、机动飞行能力大幅提升。
附图说明
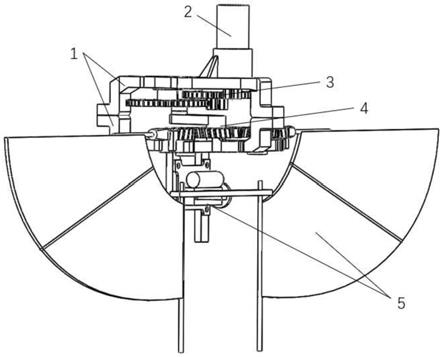
24.图1是本发明一种具有滚转控制功能的高效传动扑翼机构的整体示意图;
25.图2是本发明一种具有滚转控制功能的高效传动扑翼机构的固定机构示意图;
26.图3是本发明一种具有滚转控制功能的高效传动扑翼机构的电机及减速器示意图;
27.图4是本发明一种具有滚转控制功能的高效传动扑翼机构的传动机构示意图;
28.图5是本发明一种具有滚转控制功能的高效传动扑翼机构的滚转控制机构示意图;
29.图6是本发明一种具有滚转控制功能的高效传动扑翼机构的扑翼示意图;
30.图7是本发明一种具有滚转控制功能的高效传动扑翼机构的右滚控制示意图;
31.图中:
32.1-固定机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2-电机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3-减速器
33.4-传动机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
5-滚转控制机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
101-机架
34.102-底座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
201-电机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
301-电机齿轮
35.302-减速齿轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
401-单层齿轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
402-连杆
36.403-左斜齿轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
404-右斜齿轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
405-左翼杆
37.406-右翼杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
501-控制舵机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
502-翼根固定架
38.503-扑翼
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
5031-柔性翼膜
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
5032-横杆
39.5033-竖杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
5034-斜杆
具体实施方式
40.下面结合附图对本发明的具体实施方法进行详细说明。
41.所述一种具有滚转控制功能的高效传动扑翼机构包括固定机构1、电机2、减速器3、传动机构4以及滚转控制机构5。
42.所述固定机构1包括机架101以及底座102。所述机架101为立体结构,包含有电机2、减速组以及传动机构4中的单层齿轮401的安装孔。机架101通过两端的铆钉、卡扣等与底座102固定连接。所述底座102为立体结构,包含有传动机构4中的左斜齿轮403、右斜齿轮404、左翼杆405以及右翼杆406的安装孔。底座102上表面设有滑槽,通过轴钉与传动机构4的连杆402、右斜齿轮404配合。底座102下部设计有安装点以便固定滚转控制机构5的控制舵机501。
43.所述电机2固定安装在机架101上,用于驱动传动机构4转动,从而带动扑翼503拍动,所述电机2的电机轴与电机齿轮301固定连接。
44.所述减速器3包括电机齿轮301以及减速齿轮302。所述减速齿轮302为同轴双层齿轮,双层齿轮直径不同,其中较大的一层齿轮与电机齿轮301啮合,较小的一层齿轮与传动机构4中的单层齿轮401啮合。所述减速器3将电机2的高速旋转运动进行减速并放大电机2输出扭矩以驱动传动机构4及扑翼503运动。
45.所述传动机构4包括单层齿轮401、连杆402、左斜齿轮403、右斜齿轮404、左翼杆405以及右翼杆406。所述单层齿轮401为带偏心孔的圆柱直齿轮,通过轴钉安装在底座102上。所述连杆402两端均带通孔,较厚一端通孔与单层齿轮401的偏心孔通过轴钉连接形成转动副,较薄另一端通孔通过轴钉固定在右斜齿轮404滑槽以及底座102滑槽中,行程曲柄滑块机构,将单层齿轮401的圆周运动转为连杆402沿上述滑槽上的往复直线运动。所述左斜齿轮403为圆柱斜齿轮,通过轴钉安装在底座102上,与右斜齿轮404以及左翼杆405啮合传动。所述右斜齿轮404为圆柱斜齿轮,其上表面开一水平滑槽,滑槽中心线与直径垂直,连杆402可通过该滑槽带动右斜齿轮404转动,右斜齿轮404通过轴钉安装在底座102上,与左斜齿轮403以及右翼杆406啮合传动。所述左、右翼杆结构相同,均为扑翼503安装凸台与圆柱斜齿轮的组合体,分别用于驱动左、右扑翼503运动,其中扑翼503安装凸台位于翼杆的外侧,用于固定扑翼503横杆5032;圆柱斜齿轮位于翼杆的内侧,圆柱斜齿轮上的中心孔与底座102对应安装孔位通过轴钉铆接,可绕该安装孔位自由转动,所述圆柱斜齿轮与对应侧的斜齿轮啮合传动,扑翼503安装凸台位于翼杆另外一端,用于固定扑翼503横杆5032。所述传动机构4其传动原理为:当机构需要拍动运动时,给电机2通电,带动电机齿轮301转动,经减速器3减速后驱动传动机构4。单层齿轮401转动带动连杆402一端绕单层齿轮401转轴转动,同时连杆402另一端在底座102滑槽以及右斜齿轮404滑槽内做往复直线运动,带动右斜齿轮404转动。通过设计曲柄滑块机构来转化电机2的转动运动为运动规律接近正弦运动的直线运动。右斜齿轮404与左斜齿轮403、右翼杆406的圆柱斜齿轮啮合,左斜齿轮403与左翼杆405的圆柱斜齿轮啮合传动,进行运动幅度的放大,该过程利用斜齿轮啮合运动稳定、精确的特点,实现了高效、精确的传动实现所需的高效、精确的拍动运动。
46.所述滚转控制机构5包括左扑翼503、右扑翼503、控制舵机501、翼根固定架502。所述左、右扑翼503均由柔性翼膜5031、横杆5032、竖杆5033以及斜杆5034组成,横杆5032、竖杆5033以及斜杆5034粘结在柔性翼膜5031上。横杆5032翼根端固定在传动机构4中的左、右翼杆扑翼503安装凸台上,竖杆5033上端与翼根固定架502连接。所述控制舵机501可带动扑翼503竖杆5033实现整体左右水平移动。所述翼根固定架502为一水平t型结构,t型结构两侧各有一圆孔,用于固定扑翼503竖杆5033,t型结构中间延长端设安装孔与控制舵机501舵机臂固连,扑翼503竖杆5033可在控制舵机501舵机臂带动下水平移动。飞行器不需要滚转力矩产生时,通过控制舵机501控制左右扑翼503竖杆5033的水平位置,左右扑翼503柔性翼膜5031松弛程度相同。
47.所述一种具有滚转控制功能的高效传动扑翼机构滚转控制方法为:当飞行器需要产生向右滚转力矩时,控制舵机501向右侧拉动翼根固定架502,带动两个扑翼503的竖杆5033整体向右水平移动,从而使得左侧扑翼503柔性翼膜5031张紧,右侧扑翼503柔性翼膜5031松弛。相较于舵机改变前的状态,左侧扑翼503柔性翼膜5031张紧,攻角增加;右侧扑翼503柔性翼膜5031放松,攻角减小;从而左侧扑翼503升力增加,右侧扑翼503升力减小,由于左侧扑翼503和右侧扑翼503升力作用点与重心不重合,产生向右滚转力矩。向左的滚转力
矩产生方法与向左的滚转力矩产生方法相反。
48.所述一种具有滚转控制功能的高效传动扑翼机构的制作及安装过程为:
49.(1)将电机齿轮301装在电机2主轴上,电机2与机架101对应电机2安装孔过盈配合。通过轴钉将减速齿轮302、单层齿轮401安装在机架101对应孔位上,其中减速齿轮302与电机齿轮301、单层齿轮401啮合,单层齿轮401只与减速齿轮302啮合。
50.(2)通过轴钉将分别将左斜齿轮403、右斜齿轮404、左翼杆405、右翼杆406安装在底座102对应孔位上,其中左斜齿轮403与左翼杆405啮合传动,右斜齿轮404与右翼杆406啮合传动,左斜齿轮403与右斜齿轮404啮合传动。
51.(3)将连杆402较厚一端通孔通过轴钉与单层齿轮401的偏心孔安装配合。通过轴钉将连杆402另一端与右斜齿轮404滑槽、底座102滑槽固定配合形成两个移动副。通过铆钉、卡扣等方式将机架101与底座102固定。
52.(4)制作柔性扑翼503,将扑翼503的横杆5032分别与左、右翼杆连接,将竖杆5033插入翼根固定架502的t型头两侧安装端圆孔固定。
53.(5)通过螺钉等方式将控制舵机501与机架101控制舵机501安装端固连后,将翼根固定架502与控制舵机501舵机臂通过螺钉固连。