1.本发明涉及一种无人机的空基回收装置,尤其涉及一种飞翼式无人机的空基回收装置及方法。
背景技术:
2.随着各国军事实力的快速提升,现代化作战环境愈加复杂,对无人机集群技术的快速发展提出了更高的要求,如何快速部署足够数量的无人机,并在完成战术任务后回收幸存的无人机,降低无人机集群作战的成本,是当前无人机集群作战需要进行重点研究的课题。
3.未来战争中,在没有可靠陆基或海基着陆点时,空基回收将是小型、大作战半径无人机最简易后勤和最低成本的解决方案,还具有对无人机性能影响最小和再次快速发射等优势,因此空基快速发射/回收方式将是未来集群无人机发展的重要方向。
4.随着无人机向小型化、集群化方向发展,集群作战要求第一时间内释放数十架甚至几十架无人机,在作战结束后,幸存下来的无人机能否进行回收将大大影响无人机集群作战的成本;并且若无人机能够进行回收加油,这还可以增加无人机集群作战的时间,形成长时间的空中压制。在没有可靠的陆基或海基着陆点时,空基回收将是集群无人机作战最简易的后勤支撑方案,不仅可以提高集群作战范围,还可以重复使用,降低作战成本。因此,提高集群无人机空基发射与回收效率,是集群战术走向战场的关键。
5.无人机与空中平台自主空中对接技术是集群无人机能够回收的最为核心的关键技术。目前,已经成功实现空中回收100kg重量级的亚音速无人机只有美军的x-61a“小精灵”,该无人机是通过打开运输机尾舱门,释放出类似空中加油管的回收绳索,绳索的一头与无人机上的连接装置对接成功后,就可回收绳索、将无人机收入到机舱内。这种方案采用点对点的对接方案,在地面测试中效果会很好,但是到了空中,飞行中复杂的空气动力学效应使得精准对接十分困难,这也导致了x-61a“小精灵”的第一次回收实验失败,无人机坠毁。
6.从x-61a“小精灵”空中回收失败中可以得到一条重要的经验,那就是载机附近的复杂紊流使得传统的点对点对接模式难以实现。因此,低精度对接模式是解决空基回收面临复杂气动问题的一个方法。
技术实现要素:
7.本发明所要解决的技术问题在于克服现有技术不足,提供一种飞翼式无人机的空基回收装置,可实现飞翼式无人机的低精度对接回收,具有回收成功率高,回收速度快的优点。
8.本发明具体采用以下技术方案解决上述技术问题:
9.一种飞翼式无人机的空基回收装置,所述飞翼式无人机的重心处设置有向上和向下的两根可折叠导向杆,在飞行巡航时可以向后折叠至无人机内部,对接时从飞机内弹出,
在所述飞翼式无人机的头部还设置有锁定机构;所述空基回收装置包括收放运输一体化机构、无人机对接架以及连接这两者的缓冲机构;所述无人机对接架上形成有从后向前不断收窄的四个收敛形通道,四个收敛形通道呈菱形布置,左、右两个收敛形通道与所述飞翼式无人机的两翼相匹配,上、下两个收敛形通道与所述飞翼式无人机的上下两根可折叠导向杆相匹配,上部收敛形通道的收敛末端设置有用于锁定所述可折叠导向杆的电磁锁;所述收放运输一体化机构用于通过伸缩方式对无人机对接架进行收放,并将无人机对接架所捕获的飞翼式无人机以牵引的方式运输至载机内。
10.优选地,所述无人机对接架包括主框架以及一端固定在主框架上的四根承力杆、四个纵向导轨、四个横向导轨,每根承力杆的另一端与一个纵向导轨、一个横向导轨的另一端连接在一起形成一个三角架结构,四个三角架结构成矩形布置,上面两个三角架结构中的两个横向导轨之间及下面两个三角架结构中的两个横向导轨之间分别形成所述上、下两个收敛形通道,左侧两个三角架结构中的两个纵向导轨之间及右侧两个三角架结构中的两个纵向导轨之间分别形成所述左、右两个收敛形通道。
11.进一步优选地,所述纵向导轨上设置有一组橡胶轮。
12.进一步优选地,每个三角架结构中由承力杆与纵向导轨所形成的纵向平面中均设置有整流板。
13.进一步优选地,在所述主框架上安装有一组用于所述飞翼式无人机导航的红外信标。
14.更进一步优选地,所述红外信标为4个,分别安装在所述主框架后侧的四个角点上。
15.优选地,所述收放运输一体化机构包括行车架、行车、伸缩臂、缆绳,所述行车架固定安装于载机机舱上部,所述伸缩臂的一端铰接在行车上,另一端用于安装所述缓冲机构和无人机对接架,缆绳通过固定在伸缩臂端部的导向轮绕在伸缩臂上,缆绳上以固定的间隔设置有一组吊环。
16.优选地,所述锁定机构为前后布置的两个锁扣。
17.一种飞翼式无人机的空基回收方法,基于如上任一技术方案所述空基回收装置实现,包括以下步骤:
18.步骤1、载机在飞行中通过收放运输一体化机构将无人机对接架伸出到载机的后下方;
19.步骤2、无人机弹出所述可折叠导向杆,并在自身导航系统的引导下从远处飞进无人机对接架;
20.步骤3、当无人机的可折叠导向杆通过电磁锁时,控制电磁锁锁定可折叠导向杆,完成无人机与无人机对接架的锁定,并关闭无人机的发动机;
21.步骤4、控制无人机头部的锁定机构与收放运输一体化机构中的牵引机构锁定;
22.步骤5、控制收放运输一体化机构以牵引的方式将无人机收回载机机舱内;
23.步骤6、完成无人机回收后,将收放运输一体化机构收至最短后收回载机机舱内。
24.优选地,步骤1中无人机对接架的向后伸出距离x和向下伸出距离y按照下式确定:
[0025][0026]
其中,v为载机飞行速度,单位为m/s;h为载机飞行高度,单位为m;l为载机机翼宽度,单位为m。
[0027]
相比现有技术,本发明技术方案具有以下有益效果:
[0028]
与其他的空基无人机点对点对接模式不同,本发明采用了线对接方案,即利用无人机上的导向杆和飞翼与无人机对接架上的收敛形通道形成线接触,对无人机先进行低精度的捕获,随后在惯性作用下无人机会继续向前运动,这时由于收敛形通道不断收窄,无人机自动地与对接架完成中心对齐,从而完成对接;将对接架伸出到载机后下方,从而使对接时载机后方的复杂空气动力学效应得以忽略。该方案大大降低了对接时对于无人机的控制精度,增加了对接时的成功率,提高了对接速度。
[0029]
本发明采用收放运输一体化机构,通过伸缩方式对无人机对接架进行收放,并将无人机对接架所捕获的飞翼式无人机以牵引的方式运输至载机内,在已捕获无人机从无人机对接架被牵引至载机的过程中,其它无人机可同时与无人机对接架对接,有效缩短了两架无人机对接的时间间隔,使无人机的回收过程连续化,进一步提高了无人机回收的速度。
附图说明
[0030]
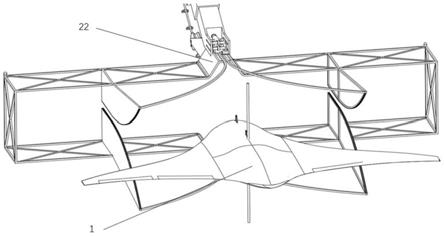
图1是本发明的整体示意图;
[0031]
图2是本发明收放运输一体化机构与无人机对接架连接示意图;
[0032]
图3是本发明的无人机示意图;
[0033]
图4是本发明的收放运输一体化机构示意图;
[0034]
图5是本发明的无人机对接架示意图;
[0035]
图6是本发明对接架与飞机的对接状态示意图;
[0036]
图7是本发明对接架与飞机的固定状态示意图;
[0037]
图8是本发明无人机第一个锁扣与吊环连接示意图;
[0038]
图9是本发明无人机与缆绳两自由度连接示意图;
[0039]
图10是本发明无人机转运过程示意图;
[0040]
图11是本发明的回收装置收回状态示意图;
[0041]
图中包含以下附图标记:
[0042]
1、无人机,11、可折叠导向杆,12、锁扣,13、锁舌,2、空基回收装置,21、收放运输一体化机构,22、无人机对接架,23缓冲器,24、半牙螺栓,25、槽口,26、圆柱形支架,211、车架,212、行车,213、一号臂,214、二号臂,215、三号臂,216、缆绳,217、导向轮,218、吊环,219,导向轮支座,220、电磁锁锁舌,221、主框架固定板,222、主框架,223纵向导轨,224、承力杆,225、横向导轨,226、电磁锁,227、整流板,228、橡胶轮,229、红外信标。
具体实施方式
[0043]
针对现有空基无人机点对点对接模式所存在的不足,本发明的思路是采用线对接方案,即利用无人机上的导向杆和飞翼与无人机对接架上的收敛形通道形成线接触,对无
人机先进行低精度的捕获,随后在惯性作用下无人机会继续向前运动,这时由于收敛形通道不断收窄,无人机自动地与对接架完成中心对齐,从而完成对接;采用收放运输一体化机构,通过伸缩方式对无人机对接架进行收放,并将无人机对接架所捕获的飞翼式无人机以牵引的方式运输至载机内;该方案可大大降低对接时对于无人机的控制精度,减少载机后方的复杂的空气动力学效应的影响,增加对接时的成功率,大幅提高对接速度。
[0044]
具体地,本发明所提出的技术方案如下:
[0045]
一种飞翼式无人机的空基回收装置,所述飞翼式无人机的重心处设置有向上和向下的两根可折叠导向杆,在飞行巡航时可以向后折叠至无人机内部,对接时从飞机内弹出,在所述飞翼式无人机的头部还设置有锁定机构;所述空基回收装置包括收放运输一体化机构、无人机对接架以及连接这两者的缓冲机构;所述无人机对接架上形成有从后向前不断收窄的四个收敛形通道,四个收敛形通道呈菱形布置,左、右两个收敛形通道与所述飞翼式无人机的两翼相匹配,上、下两个收敛形通道与所述飞翼式无人机的上下两根可折叠导向杆相匹配,上部收敛形通道的收敛末端设置有用于锁定所述可折叠导向杆的电磁锁;所述收放运输一体化机构用于通过伸缩方式对无人机对接架进行收放,并将无人机对接架所捕获的飞翼式无人机以牵引的方式运输至载机内。
[0046]
优选地,所述无人机对接架包括主框架以及一端固定在主框架上的四根承力杆、四个纵向导轨、四个横向导轨,每根承力杆的另一端与一个纵向导轨、一个横向导轨的另一端连接在一起形成一个三角架结构,四个三角架结构成矩形布置,上面两个三角架结构中的两个横向导轨之间及下面两个三角架结构中的两个横向导轨之间分别形成所述上、下两个收敛形通道,左侧两个三角架结构中的两个纵向导轨之间及右侧两个三角架结构中的两个纵向导轨之间分别形成所述左、右两个收敛形通道。
[0047]
进一步优选地,所述纵向导轨上设置有一组橡胶轮。
[0048]
进一步优选地,每个三角架结构中由承力杆与纵向导轨所形成的纵向平面中均设置有整流板。
[0049]
进一步优选地,在所述主框架上安装有一组用于所述飞翼式无人机导航的红外信标。
[0050]
更进一步优选地,所述红外信标为4个,分别安装在所述主框架后侧的四个角点上。
[0051]
优选地,所述收放运输一体化机构包括行车架、行车、伸缩臂、缆绳,所述行车架固定安装于载机机舱上部,所述伸缩臂的一端铰接在行车上,另一端用于安装所述缓冲机构和无人机对接架,缆绳通过固定在伸缩臂端部的导向轮绕在伸缩臂上,缆绳上以固定的间隔设置有一组吊环。
[0052]
优选地,所述锁定机构为前后布置的两个锁扣。
[0053]
一种飞翼式无人机的空基回收方法,基于如上任一技术方案所述空基回收装置实现,包括以下步骤:
[0054]
步骤1、载机在飞行中通过收放运输一体化机构将无人机对接架伸出到载机的后下方;
[0055]
步骤2、无人机弹出所述可折叠导向杆,并在自身导航系统的引导下从远处飞进无人机对接架;
[0056]
步骤3、当无人机的可折叠导向杆通过电磁锁时,控制电磁锁锁定可折叠导向杆,完成无人机与无人机对接架的锁定,并关闭无人机的发动机;
[0057]
步骤4、控制无人机头部的锁定机构与收放运输一体化机构中的牵引机构锁定;
[0058]
步骤5、控制收放运输一体化机构以牵引的方式将无人机收回载机机舱内;
[0059]
步骤6、完成无人机回收后,将收放运输一体化机构收至最短后收回载机机舱内。
[0060]
优选地,步骤1中无人机对接架向后伸出距离x和向下伸出距离y按照下式确定:
[0061][0062]
其中,v为载机飞行速度(m/s),h为载机飞行高度(m),l为载机机翼宽度(m)。
[0063]
为了便于公众理解,下面通过一个具体实施例并结合附图来对本发明的技术方案进行详细说明:
[0064]
如图1所示,空基回收装置2用于无人机1的空基回收,其包括收放运输一体化机构21、无人机对接架22和连接两者的缓冲机构。
[0065]
如图2所示,无人机对接架22利用8颗半牙螺栓24,先穿过收放运输一体化机构21中伸缩臂末端的槽口25,再拧紧到主框架上的固定板221上的8个螺纹孔内,使无人机对接架22可以沿着槽口25平行的方向移动。组成缓冲机构的两个缓冲器分别焊接在主框架上的固定板221上的四个圆柱形支架26上,另一端与收放运输一体化机构21中的伸缩臂连接。
[0066]
本实施例中的无人机如图3所示,采用飞翼式结构,并安装有向上和向下的两根可折叠导向杆11及两个锁扣12,可折叠导向杆11位于无人机重心处,在飞行巡航时可以向后折叠至无人机内部,对接时从飞机内弹出;两个锁扣12位于无人机头部,其锁舌13可以活动,用于锁扣的开合。
[0067]
本实施例中的收放运输一体化机构如图4所示,由行车架211、行车212、一号臂213、二号臂214、三号臂215、缆绳216、导向轮217和吊环218组成;行车架211固定在载机的机舱上部,行车212可以在行车架211上运动,用于将伸缩臂伸出和收回机舱内;一号臂213、二号臂214、三号臂215构成一个伸缩臂,所述伸缩臂的一端铰接在行车212上,一端用于安装缓冲器23和主框架222;导向轮217安装在三号臂215下方的导向轮支座219上,缆绳216通过导向轮217绕在伸缩臂上,一组吊环218以固定的间隔连接在缆绳216上。
[0068]
本实施例中的无人机对接架如图5所示,包括主框架222、电磁锁226、整流板227以及一端固定在主框架222上的四根承力杆224、四个纵向导轨223、四个横向导轨225;如图5所示,承力杆224、横向导轨225和纵向导轨223一端分别焊接在主框架222上,另一端连接在一起,形成一个三角架结构,可以增强强度;如图5所示,主框架222上共形成有4个该三角架结构,四个三角架结构成矩形布置,上面两个三角架结构中的两个横向导轨225之间及下面两个三角架结构中的两个横向导轨225之间分别形成上、下两个收敛形通道,左侧两个三角架结构中的两个纵向导轨223之间及右侧两个三角架结构中的两个纵向导轨223之间分别形成一左一右两个收敛形通道;电磁锁226安装在主框架222上,位于上部收敛形通道的收敛末端的上方;整流板227固定在纵向导轨223、承力杆224和主框架222形成的纵向平面上,起稳定来流,保证后方无人机对接时的稳定的作用;本实施例中的两个纵向导轨223上都安装有一组橡胶轮228,用于对无人机飞翼与纵向导轨的碰撞进行缓冲,以保护无人机飞翼;
四个红外信标229安装在主框架222后侧的四个角点上,用于无人机的导航。
[0069]
使用上述回收装置进行无人机回收的过程如下:
[0070]
步骤1、如图1所示,在载机后舱门打开后,无人机对接架22通过收放运输一体化机构21伸出到载机的后下方,伸出一定的距离,这样可以避免无人机在靠近运输机时,由于受到运输机飞行时产生的尾迹紊流的干扰而影响无人机回收的成功率与回收速度。
[0071]
步骤2、如图6所示,无人机通过自身的红外导航模块识别无人机对接架22上的四个红外信标229,在距离无人机对接架一定距离处弹出导向杆11,随后在红外导航系统的引导下从远处飞进无人机对接架22。在飞进无人机对接架的过程中,由于可折叠导向杆11位于无人机重心处,可折叠导向杆11与横向导轨225相互作用会辅助无人机与无人机对接架横向对齐,而无人机飞翼与纵向导轨224的相互作用则会辅助无人机与无人机对接架纵向对齐。
[0072]
步骤3、如图7所示,无人机的可折叠导向杆11和无人机飞翼在通过收敛形通道的收敛段后还会继续向前运行一段距离,直至无人机上的可折叠导向杆11通过电磁锁226,通过电磁锁的锁舌220锁定导向杆,完成无人机与无人机对接架的锁定;锁定后的无人机会关闭发动机,以完成后续转移。
[0073]
步骤4、如图8所示,无人机1与无人机对接架21锁定后,无人机1机头上的两个锁扣12的锁舌13打开,缆绳216上的吊环218在缆绳216的带动下扣入第一个锁扣12中,无人机检测到吊环218进入第一个锁扣12后,会合上第一个锁扣12的锁舌,给回收装置发送打开电磁锁226的指令并收回可折叠导向杆11,随后无人机1依靠缆绳216的牵引力慢慢从无人机对接架22中水平抽出;并且,在水平抽出的过程,缆绳216上的吊环218还会扣入无人机上的第二个锁扣12中,实现无人机的两自由度固定,如图9所示。
[0074]
步骤5、如图10所示,经过两自由度固定的无人机会继续通过缆绳216运输,收回载机的机舱内。得益于无人机的两自由度固定,无人机在缆绳上运输时的偏航与俯仰自由度均被固定,而横滚方向的稳定则可以通过无人机的舵面操控。
[0075]
步骤6、如图11所示,载机在结束回收后进行巡航飞行时,空基回收装置2的伸缩臂会收至最短,并在行车212的帮助下收回载机内部。
[0076]
本发明与其他的空基无人机点对点对接模式不同,采用了线对接方案。即利用无人机上的导向杆11和飞翼与无人机对接架22上的收敛形通道形成线接触,对无人机先进行低精度的捕获,随后在惯性作用下无人机会继续向前运动,这时由于收敛形通道不断收窄,无人机自动地与对接架完成中心对齐,完成对接。无人机的可捕获范围为横向导轨225与纵向导轨223的四个交点构成的长方形区域,只需要无人机飞入上述长方形区域即可完成对接,对接时无人机中心与对接装置中心的偏差可以达到一米以上。因此该发明大大降低了对接时对于无人机的控制精度,只需保证无人机机身位于可捕获的范围内,即可完成对接,从而使载机后方的复杂的空气动力学效应得以忽略,增加了对接时的成功率,提高了对接速度。
[0077]
另外地,由于无人机对接架22在回收无人机时,收放运输一体化机构21仍然可以通过缆绳216将无人机1运输至机舱内。因此,当一架无人机挂在缆绳216上再被拉出无人机对接架22后,另一架在远处等待的无人机可以立刻进行对接,缩短了两架无人机对接的时间间隔,使无人机的回收过程连续化,进一步提高了无人机回收的速度。
[0078]
综上,本发明相比其他空基集群无人机回收方案,具有回收成功率高,回收速度快的特点,适用于大批量无人机集群的空基回收。