1.本实用新型涉及无人机技术领域,特别涉及一种长航时无人机油电混合动力自动控制系统。
背景技术:
2.无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。与有人驾驶飞机相比,无人机往往更适合那些太“愚钝,肮脏或危险”的任务。无人机按应用领域,可分为军用与民用。军用方面,无人机分为侦察机和靶机。民用方面,无人机+行业应用,是无人机真正的刚需;目前在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域的应用,大大的拓展了无人机本身的用途,发达国家也在积极扩展行业应用与发展无人机技术。
3.但是,现有无人机存在以下技术缺点:1、现如今大多无人机油电混合动力系统通过控制发动机转速改变电压输出,电压与转速成正比,发动机转速不能精确调节;2、普遍采用舵机控制发动机风门,从而控制发动机转速,控制误差大;3、有的采用dc-dc模块升压,增加了无人机重量,限制了无人机的带载能力。
技术实现要素:
4.本实用新型的目的在于提供一种长航时无人机油电混合动力自动控制系统,以解决上述背景技术中提出的技术问题。
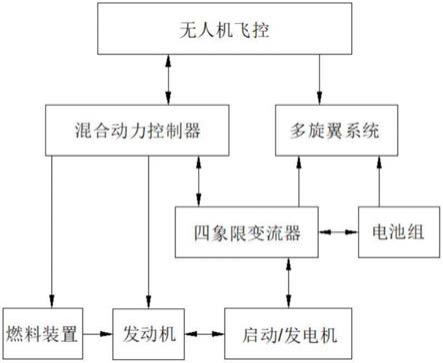
5.为实现上述目的,本实用新型提供如下技术方案:一种长航时无人机油电混合动力自动控制系统,包括有无人机飞控、混合动力控制器、多旋翼系统、四象限变流器、电池组、燃料装置、发动机和启动/发电机;
6.所述无人机飞控与混合动力控制器、多旋翼系统电性连接;
7.所述混合动力控制器与四象限变流器、燃料装置、发动机电性连接;
8.所述燃料装置与发动机连接,所述发动机与启动/发电机同轴连接,所述启动/发电机与四象限变流器电性连接,所述四象限变流器和多旋翼系统电性连接;
9.所述电池组与四象限变流器、多旋翼系统电性连接。
10.优选的,所述无人机飞控与混合动力控制器双向电性连接;所述混合动力控制器与四象限变流器双向电性连接。
11.优选的,所述混合动力控制器通过控制发动机转速和电池组充放电来为系统供能。
12.优选的,对所述燃料装置的油箱油量进行实时监测,当油箱液位低于设定值,则报警;当油箱液位不低于设定值,则不做反馈;若油量严重不足,则停机并进行降落。
13.优选的,对所述发动机的缸头温度进行采集,根据温度传感器反馈的温度值,判断缸头温度是否低于设定值;若低于设定值,则继续增大油门开度控制;若高于设定值,即发
动机超温,则报警。
14.优选的,对所述电池组的电量进行检测,若电池组电量低于设定值,则控制发动机增大输出,同时通过四象限变流器为无人机供电;若高于设定值,即电池电量低,则报警。
15.优选的,所述混合动力控制器可以通过内部的控制算法(空间矢量法),控制mos管的开关组合,实现恒压(升压或降压)输出;还可以通过混合动力控制器主动调节电压空间矢量,从而控制启动/发电机的输出电流,为电池组平衡稳定充电。
16.本实用新型的技术效果和优点:
17.1、本实用新型简化了油电混动单元结构,提高了系统的鲁棒性;
18.2、本实用新型减轻了系统重量,提高了功重比及无人机带载能力;
19.3、本实用新型能够精确控制发动机转速,实现了无级变速;
20.4、本实用新型通过主动空间矢量控制发电机输出电压,实现充电以及负载电压的灵活调节,使得发动机能够运行在较高燃油效率区间;
21.5、本实用新型在一定转速范围内,自动控制蓄能锂电池组充放电和恒压(升压或降压)输出,实现了高低转速不同工况的最佳匹配,使发动机始终在最佳工况下工作,提高了发动机燃油效率和使用寿命。
附图说明
22.图1为本实用新型的系统结构示意图。
23.图2为本实用新型的系统控制逻辑图。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.本实用新型提供了如图1-图2所示的一种长航时无人机油电混合动力自动控制系统,包括有无人机飞控、混合动力控制器、多旋翼系统、四象限变流器、电池组、燃料装置、发动机和启动/发电机;
26.所述无人机飞控与混合动力控制器、多旋翼系统电性连接;
27.所述混合动力控制器与四象限变流器、燃料装置、发动机电性连接;
28.所述燃料装置与发动机连接,所述发动机与启动/发电机同轴连接,所述启动/发电机与四象限变流器电性连接,所述四象限变流器和多旋翼系统电性连接;
29.所述电池组与四象限变流器、多旋翼系统电性连接。
30.所述无人机飞控与混合动力控制器双向电性连接;所述混合动力控制器与四象限变流器双向电性连接。
31.所述混合动力控制器通过控制发动机转速和电池组充放电来为系统供能。
32.对所述燃料装置的油箱油量进行实时监测,当油箱液位低于设定值,则报警;当油箱液位不低于设定值,则不做反馈;若油量严重不足,则停机并进行降落。
33.对所述发动机的缸头温度进行采集,根据温度传感器反馈的温度值,判断缸头温
度是否低于设定值;若低于设定值,则继续增大油门开度控制;若高于设定值,即发动机超温,则报警。
34.对所述电池组的电量进行检测,若电池组电量低于设定值,则控制发动机增大输出,同时通过四象限变流器为无人机供电;若高于设定值,即电池电量低,则报警。
35.所述混合动力控制器可以通过内部的控制算法(空间矢量法),控制mos管的开关组合,实现恒压(升压或降压)输出;还可以通过混合动力控制器主动调节电压空间矢量,从而控制启动/发电机的输出电流,为电池组平衡稳定充电。
36.本实施例的工作原理:对发动机缸头温度和燃料装置的油箱油量进行实时监测采集,经控制器处理后反馈给步进电机和整流器,自动调节发动机油门、风门开度,控制发动机转速,实现无级变速。对推力螺旋桨两端的电压、电流进行监测采集,通过被动和主动空间矢量调节实现定速-变压和变速-恒压控制,实现高低转速不同工况最佳匹配,实现发动机长寿命,高效率,长航时,维护简单的目的。采用步进电机进行控制,精确调节发动机转速,实现无级变速;在一定的发动机转速区间内,根据负载需求,利用空间矢量算法控制输出电压,保持恒压(升压或降压)输出,实现了对发动机转速和输出负载的独立控制,以及高低转速不同工况的最佳匹配;在发电量富余的情况下,通过主动调节电压空间矢量控制发动机输出电流,为蓄能锂电池组充电。
37.本实用新型的技术效果和优点:1、本实用新型简化了油电混动单元结构,提高了系统的鲁棒性;2、本实用新型减轻了系统重量,提高了功重比及无人机带载能力;3、本实用新型能够精确控制发动机转速,实现了无级变速;4、本实用新型通过主动空间矢量控制发电机输出电压,实现充电以及负载电压的灵活调节,使得发动机能够运行在较高燃油效率区间;5、本实用新型在一定转速范围内,自动控制蓄能锂电池组充放电和恒压(升压或降压)输出,实现了高低转速不同工况的最佳匹配,使发动机始终在最佳工况下工作,提高了发动机燃油效率和使用寿命。
38.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。