1.本发明涉及一种飞行器,尤其涉及一种有布袋式扑翼系统操作简易的飞行器,布袋式扑翼系统用于飞行器起飞或航行。
背景技术:
2.人的生命只有一次,生命是宝贵的,保证人的生命安全是载人飞行器的基本保障。
3.人的生活必定大多数是人口密集的区域,载人飞行器在人口密集区起降和飞行,注定要注意扰民问题,也就是要减少噪音。起降环境问题,也就是机场,飞行器起降环境不能有过多特殊要求,只要有块空地就行,才能是普适的飞行器。
4.专利cn106604426b《一种飞行器及流体发电机》,具备了上述要求,但没有给出具体的操控简单,易操控的飞行器结构和安全的飞行器动力系统。
5.飞行器的安全的扑翼系统是保证飞行器坠落安全的保证。飞行器的动力系统的设计是载人飞行器安全的又一个普适性的对人的安全保证问题,动力系统设计直接关系操控是否简单易控,是否允许操作失误。高空中的飞行器坠落安全不能依靠驾驶人员的技能,要从设备本身上去保障,设备本身要允许飞行器操作人员极其简单的就能操作,操作失误了也不会发生重大事故,坠落了也能保障乘员安全。
技术实现要素:
[0006] 为了解决上面的问题,本发明提供的扑翼系统(3)的组合伞(15)由组合伞框架(151)、布袋固定绳(153)和布袋(152)组成;布袋(152)由布(1521)、固定孔(1522)和气孔1523组成; 布袋固定绳(153)安装在组合伞框架(151)上,众多布袋(152)通过布袋(152)上的安装孔1522把布袋(152)通过布袋固定绳(153)安装在组合伞框架(151)上。
[0007]
组合伞(15)上下往复运动,组合伞(15)向上运动时,布袋(152)两侧的布(1521)在空气阻力压力作用下相对运动,布袋(152)开口趋向闭合,布袋(152)变瘦小,挤出布袋(152)内的大量空气;布袋(152)口趋向闭合,开口正面迎击空气面积减到很小,减少了空气阻力,同时布袋(152)内大量空气被挤出,只有少量的空气留在布袋(152)内并被加速。组合伞(15)向下运动时,布袋(152)灌入空气,其两侧的布(1521)在空气压力作用下相向运动,布袋(152)开口趋向张开,布袋(152)变肥胖,布袋(152)内灌入大量空气;布袋(152)口张开,开口正面迎击空气面积增大,增大了空气阻力,布袋(152)内灌入的大量空气随布袋向下运动被加速。组合伞(15)上行运动和下行运行,产生的反作用力差,差别巨大,反作用力的差,就提供了飞行器的升力。
[0008]
布袋(152)的气孔1523可以在布袋(152)向下运动时,继续挤出灌入布袋(152)的被加速的空气,从而使新的空气继续灌入布袋,并被加速,以提供更多的反作用力。
[0009]
组合伞(15),可以参考专利cn106604426b《一种飞行器及流体发电机》。
[0010]
组合伞(15)由众多的开口向下的布袋(152)组成,一旦飞行器失去动力坠落,每一个布袋(152),就会形成一个个小伞,缓冲坠落的加速度,只要设计上布袋(152)足够多,就
可以使坠落的飞行器缓慢的下坠,从而保证飞行器乘员安全。
[0011]
由于扑翼系统(3)的组合伞(15)使用低速的扑翼系统,噪音很小。
[0012]
为了解决上面的问题,本发明提供一种飞行器,由机体(1)、动力系统(2)、扑翼系统(3)和自传机(16)组成;扑翼系统(3)由水平滑台(4)、组合伞伞架(5)、推杆(6)、传动轴(8)、固定轴(9)、直线运动放大器(13)、组合伞伞杆(14)和组合伞(15)组成;机体(1)上安装一套动力系统(2);扑翼系统(3)相对于机体(1)对称布置在机体(1)的四角;扑翼系统(3)的4个水平滑台(4)分别安装在机体(1)的四角;每个水平滑台(4)的动平台上安装一个组合伞伞架(5),组合伞伞架(5)可以跟随水平滑台(4)的动平台移动,从而带动推杆(6)、传动轴(8)、固定轴(9)、直线运动放大器(13)、组合伞伞杆(14)和组合伞(15)一起移动;每个组合伞伞架(5)上安装有推杆(6)、固定轴(9)和组合伞伞杆,每个直线运动放大器(13)通过对应的固定轴(9)安装在对应的组合伞伞架(5)上;直线运动放大器(13)和推杆(6)通过传动轴(8)连接在一起,推杆(6)通过传动轴(8)把推杆(6)的直线运动传递给直线运动放大器(13),直线运动放大器(13)把推杆(6)的短程直线运动成倍放大;组合伞伞杆(14)可以在组合伞伞架(5)上滑动,组合伞伞杆(14)的一端安装在直线运动放大器(13)上,另一端安装组合伞(15),组合伞伞杆(14)把直线运动放大器(13)放大的直线运动传递给组合伞(15),让组合伞(15)向上直线运动或向下直线运动,形成扑翼;自传机(16)安装在机体(1)上,提供机体(1)自转的动力。
[0013]
飞行器起飞时,先通过水平滑台(4)调节扑翼系统(3)相对飞行器重心的距离,从而实现飞行器四角的扑翼系统(3)的升力和距离重心距离产生的力矩相等;飞行器能平地水平起飞。起飞前调整好力矩平衡,保证飞行器稳定平衡。
[0014]
飞行器的动力系统(2),提供给四个推杆(6)同时同向同行程的直线运动,再通过直线运动放大器(13)传递给四个组合伞(15)同时同向同行程的上下往复运动;四个组合伞(15)同时同向同行程的上下往复运动是飞行器水平平衡的的安全保证。
[0015]
水平滑台(4)相对飞行器的重心距离可以微调,从而使飞行器四角力矩出现力矩差,力矩差使飞行器相对于水平面产生倾斜,倾斜产生动力在水平方向的分力,分力使飞行器水平移动。水平滑台(4)相对飞行器的重心距离的微调,不会因操作失误,使飞行器突然失去飞行水平平衡。
[0016]
飞行器结构简单,操控容易,水平滑台(4)微调就允许操控失误。
[0017]
为了解决上面的问题,本发明提供的又 一种飞行器,由机体(1)、动力系统(2)、扑翼系统(3)和自传机(16)组成;扑翼系统(3)由水平滑台(4)、组合伞伞架(5)、马达(7)、传动轴(8)、固定轴(9)、摇臂(10)、摇杆(11)、连杆(12)、直线运动放大器(13)、组合伞伞杆(14)和组合伞(15)组成;机体(1)上安装一套动力系统(2);扑翼系统(3)相对于机体(1)对称布置在机体(1)的四角;扑翼系统(3)的4个水平滑台(4)分别安装在机体(1)的四角;每个水平滑台(4)的动平台上安装一个组合伞伞架(5),组合伞伞架(5)可以跟随水平滑台(4)的动平台移动,从而带动马达(7)、传动轴(8)、固定轴(9)、摇臂(10)、摇杆(11)、连杆(12)、直线运动放大器(13)、组合伞伞杆(14)和组合伞(15)一起移动;每个组合伞伞架(5)上安装有马达(7)、固定轴(9)和组合伞伞杆,每个直线运动放大器(13)通过对应的固定轴(9)安装在对应的组合伞伞架(5)上;直线运动放大器(13)和马达(7)通过摇臂(10)、摇杆(11)和连杆(12)驱动的传动轴(8)连接在一起。
[0018]
马达(7)通过摇臂(10)、摇杆(11)和连杆(12)把马达(7)的旋转运动转换成往复直线运动递给传动轴(8),传动轴(8)再把往复直线运动传递给直线运动放大器(13),直线运动放大器(13)把传动轴(8)的短程直线运动成倍放大;组合伞伞杆(14)可以在组合伞伞架(5)上滑动,组合伞伞杆(14)的一端安装在直线运动放大器(13)上,另一端安装组合伞(15),组合伞伞杆(14)把直线运动放大器(13)放大的直线运动传递给组合伞(15),让组合伞(15)向上直线运动或向下直线运动,形成扑翼;自传机(16)安装在机体(1)上,提供机体(1)自转的动力。
[0019]
飞行器起飞时,先通过水平滑台(4)调节扑翼系统(3)相对飞行器重心的距离,从而实现飞行器四角的扑翼系统(3)的升力和距离重心距离产生的力矩相等;飞行器能平地水平起飞。起飞前调整好力矩平衡,保证飞行器稳定平衡平地水平起飞。
[0020]
飞行器的动力系统(2),提供给四个马达(7)统一的动力,使四个马达(7)同时同速运行,同时同速的马达(7)通过摇臂(10)、摇杆(11)、连杆(12)和直线运动放大器(13)传递给组合伞(15)同时同向同行程的上下往复直线运动,是飞行器水平平衡的的安全保证。
[0021]
水平滑台(4)相对飞行器的重心距离可以微调,从而使飞行器四角力矩出现力矩差,力矩差使飞行器相对于水平面产生倾斜,倾斜产生动力在水平方向的分力,分力使飞行器水平移动。水平滑台(4)相对飞行器的重心距离的微调,不会因操作失误,使飞行器突然失去飞行水平平衡。
[0022]
飞行器结构简单,操控容易,水平滑台(4)微调就允许操控失误。
[0023]
为了解决上面的问题,本发明提供的再一种飞行器,由机体(1)、动力系统(2)和扑翼系统(3)组成;扑翼系统(3)由组合伞伞架(5)、推杆(6)、传动轴(8)、固定轴(9)、直线运动放大器(13)、组合伞伞杆(14)和组合伞(15)组成;机体(1)上安装一套动力系统(2);扑翼系统(3)相对于机体(1)对称布置在机体(1)的四角;扑翼系统(3)的4个组合伞伞架(5)分别安装在机体(1)的四角;每个组合伞伞架(5)上安装有推杆(6)、固定轴(9)和组合伞伞杆,每个直线运动放大器(13)通过对应的固定轴(9)安装在对应的组合伞伞架(5)上;直线运动放大器(13)和推杆(6)通过传动轴(8)连接在一起,推杆(6)通过传动轴(8)把推杆(6)的直线运动传递给直线运动放大器(13),直线运动放大器(13)把推杆(6)的短程直线运动成倍放大;组合伞伞杆(14)可以在组合伞伞架(5)上滑动,组合伞伞杆(14)的一端安装在直线运动放大器(13)上,另一端安装组合伞(15),组合伞伞杆(14)把直线运动放大器(13)放大的直线运动传递给组合伞(15),让组合伞(15)向上直线运动或向下直线运动,形成扑翼。
[0024]
飞行器起飞时,先通过调节阀(24)调节推杆(6)的行程,从而实现飞行器四角的扑翼系统(3)的升力和距离重心距离产生的力矩相等;飞行器能平地水平起飞。
[0025]
飞行器的动力系统(2),提供给四个推杆(6)同时同向同行程的直线运动,再通过直线运动放大器(13)传递给四个组合伞(15)同时同向同行程的上下往复运动;四个组合伞(15)同时同向同行程的上下往复运动是飞行器的安全保证。
[0026]
推杆(6)可以从动力系统3内部通过调节阀(24)微调节组合伞(15)同时同向上下往复运动的行程,从而使飞行器四角力矩出现力矩差,力矩差使飞行器相对于水平面产生倾斜,倾斜产生动力在水平方向的分力,分力使飞行器水平移动。
[0027]
飞行器可以四个方向飞行不设自转。安装的相机或驾驶舱可以自行自转。
附图说明
[0028]
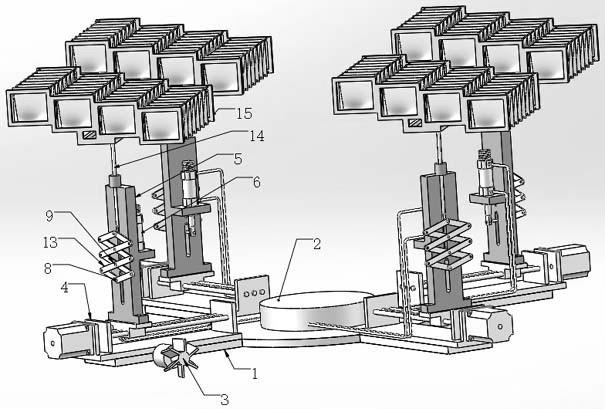
图1是一种飞行器的第一个实施例示意图。
[0029]
图2是一种飞行器的第二个实施例示意图。
[0030]
图3是一种飞行器的第三个实施例示意图。
[0031]
图4是一种飞行器的动力系统(2)的第一个实施例示意图。
[0032]
图5是一种飞行器的动力系统(2)的第二个实施例示意图。
[0033]
图6是一种飞行器的动力系统(2)的第三个实施例示意图。
[0034]
图7是一种飞行器的动力系统(2)的第四个实施例示意图。
[0035]
图8是一种飞行器的动力系统(2)的第五个实施例示意图。
[0036]
图9是组合伞(15)一种实施例示意图。
[0037]
图10是布袋(152)向上直线运动布袋口闭合状态示意图。
[0038]
图11是布袋(152)向下直线运动布袋口张开状态示意图。
具体实施方式
[0039]
如图1、图4、图5和图6所示:一种飞行器,由机体(1)、动力系统(2)、扑翼系统(3)和自传机(16)组成;扑翼系统(3)由水平滑台(4)、组合伞伞架(5)、推杆(6)、传动轴(8)、固定轴(9)、直线运动放大器(13)、组合伞伞杆(14)和组合伞(15)组成;机体(1)上安装一套动力系统(2);扑翼系统(3)相对于机体(1)对称布置在机体(1)的四角;扑翼系统(3)的4个水平滑台(4)分别安装在机体(1)的四角;每个水平滑台(4)的动平台上安装一个组合伞伞架(5),组合伞伞架(5)可以跟随水平滑台(4)的动平台移动,从而带动推杆(6)、传动轴(8)、固定轴(9)、直线运动放大器(13)、组合伞伞杆(14)和组合伞(15)一起移动;每个组合伞伞架(5)上安装有推杆(6)、固定轴(9)和组合伞伞杆,每个直线运动放大器(13)通过对应的固定轴(9)安装在对应的组合伞伞架(5)上;直线运动放大器(13)和推杆(6)通过传动轴(8)连接在一起,推杆(6)通过传动轴(8)把推杆(6)的直线运动传递给直线运动放大器(13),直线运动放大器(13)把推杆(6)的短程直线运动成倍放大;组合伞伞杆(14)可以在组合伞伞架(5)上滑动,组合伞伞杆(14)的一端安装在直线运动放大器(13)上,另一端安装组合伞(15),组合伞伞杆(14)把直线运动放大器(13)放大的直线运动传递给组合伞(15),让组合伞(15)向上直线运动或向下直线运动,形成扑翼;自传机(16)安装在机体(1)上,提供机体(1)自转的动力。
[0040]
其中图4一种飞行器的动力系统(2),可以做图1所示的一种飞行器的动力系统(2);动力系统(2)由发动机(21)、发动机摇臂(211)、发动机摇杆(212)、发动机连杆(213)、油缸式油泵(222)、油缸式油泵活塞杆(2221)、油缸式油泵油口a (2222)、油缸式油泵油口b(2223)、油管a(2311)、油管b(2312)和调节阀(24)组成。 油缸式推杆(61)、油缸式推杆活塞杆(611)、油缸式推杆油口a(612)、油缸式推杆油口b (613)、传动轴(8)、直线运动放大器(13)和组合伞伞杆(14)和动力系统(2)组合使用。
[0041]
这里的油缸式推杆(61)是推杆(6)的一种类型。
[0042]
发动机(21)通过发动机摇臂(211)、发动机摇杆(212)和发动机连杆和四个油缸式油泵(222)的各个油缸式油泵活塞杆(2221)连接;每个油缸式油泵(222)的油缸式油泵油口a (2222)通过油管a和油缸式推杆(61)的油缸式推杆油口a 612连接;油缸式油泵(222)的
油缸式油泵油口b(2223)通过油管b(2312)和油缸式推杆(61)的油缸式推杆油口b (613)连接;油管a(2311)和油管b(2312)之间安装调节阀(24);油缸式油泵(222)的油缸式推杆活塞杆(611)通过传动轴(8)和直线运动放大器(13)相连接。
[0043]
发动机摇臂(211)、发动机摇杆(212)和发动机连杆(213)把发动机(21)的旋转力转换成四个油缸式油泵(222)的各个油缸式油泵活塞杆(2221)往复直线运动;各个油缸式油泵活塞杆(2221)向油缸式油泵(222)内直线运动,油缸式油泵(222)大腔里的传动油通过各自的油缸式油泵油口a (2222)、油管a(2311)、油缸式推杆油口a(612)注入油缸式推杆(61)的大腔;同时油缸式推杆(61)的小腔里的传动油通过各自的油缸式推杆油口b (613)、油管b(2312)和油缸式油泵油口b(2223)回到油缸式油泵(222)小腔里;使各自的油缸式推杆活塞杆(611)做伸出油缸式推杆(61)的直线运动;各个油缸式油泵活塞杆(2221)向油缸式油泵(222)外直线运动,传动油反向运动,使各自的油缸式推杆活塞杆(611)做缩回油缸式推杆(61)的直线运动;油缸式推杆活塞杆(611)伸缩的往复直线运动通过传动轴(8)驱动各自的直线运动放大器(13)和组合伞伞杆(14);调节阀(24)可以调节各自的油缸式推杆活塞杆(611)往复直线运动行程;四个油缸式推杆(61)始终输出一致的或相近的推力。正式一致的或相近的推力可以保证飞行器不倾覆。
[0044]
其中图5一种飞行器的动力系统(2),也可以做图1所示的一种飞行器的动力系统(2);动力系统(2)由发动机(21)、发动机摇臂(211)、发动机摇杆(212)、发动机连杆(213)、油缸式油泵(222)、油缸式油泵活塞杆(2221)、油缸式油泵油口a (2222)、油缸式油泵油口b(2223)、油管c(2331)、油管d(2332)、油支管a(2333)、油支管b(2334)、等时分油器(251)、等时分油器出口(2511)、等时分油器进口a(2512)、等时分油器进口b(2513)、等时分油器进口c(2514)、等时分油器进口d(2515)和调节阀(24)组成。 油缸式推杆(61)、油缸式推杆活塞杆(611)、油缸式推杆油口a(612)、油缸式推杆油口b (613)、传动轴(8)、固定轴(9)、直线运动放大器(13)和组合伞伞杆(14)和动力系统(2)组合使用。
[0045]
这里的油缸式推杆(61)是推杆(6)的一种类型。发动机(21)通过发动机摇臂(211)、发动机摇杆(212)和发动机连杆和油缸式油泵(222)的油缸式油泵活塞杆(2221)连接;油缸式油泵(222)的油缸式油泵油口a (2222)通过油管c(2331)和四个油缸式推杆(61)的各自的油支管a(2333)和各自的油缸式推杆油口a 612连接;油缸式油泵(222)的油缸式油泵油口b(2223)通过油管d(2332)和等时分油器(251)的等时分油器出口(2511)连接;等时分油器(251)的等时分油器进口b(2513)通过油支管b(2334)和油缸式推杆(61)的油缸式推杆油口b (613)连接;等时分油器(251)的等时分油器进口的等时分油器进口a(2512)、、等时分油器进口c(2514)、等时分油器进口d(2515)分别连接对应的油缸式推杆(61);油支管b(2334)上安装调节阀(24);油缸式油泵(222)的油缸式推杆活塞杆(611)通过传动轴(8)和直线运动放大器(13)相连接。
[0046] 发动机摇臂(211)、发动机摇杆(212)和发动机连杆(213)把发动机(21)的旋转力转换成油缸式油泵(222)的油缸式油泵活塞杆(2221)往复直线运动;油缸式油泵活塞杆(2221)向油缸式油泵(222)内直线运动,油缸式油泵(222)大腔里的传动油通过油缸式油泵油口a (2222)、油管c(2331)和油支管a (2333)、油缸式推杆油口a(612)注入油缸式推杆(61)的大腔,同时油缸式推杆(61)的小腔里的传动油通过油缸式推杆油口b (613)、油支管b(2334)和等时分油器(251)的等时分油器进口b(2513)进入等时分油器(251)等待分配输
出,等时分油器(251)以告诉的四分之一的时段使等时分油器进口b(2513)和等时分油器出口(2511)接通,传动油通过等时分油器出口(2511)、油管d(2332)、油缸式油泵油口b(2223)回到油缸式油泵(222)的小腔;使油缸式推杆活塞杆(611)做伸出油缸式推杆(61)的直线运动;因等时分油器(251)以高速的四分之一的时段等时分时接通分油器进口a(2512)、等时分油器进口b(2513)、等时分油器进口c(2514)和等时分油器进口d(2515)四个出油口,因此时四个油缸式推杆(61)几乎同时做一致的往复直线运动;油缸式油泵活塞杆(2221)向油缸式油泵(222)外直线运动,传动油反向运动,使油缸式推杆活塞杆(611)做缩回油缸式推杆(61)的直线运动;油缸式推杆活塞杆(611)伸缩的往复直线运动通过传动轴(8)驱动直线运动放大器(13)和组合伞伞杆(14);调节阀(24)可以调节油缸式推杆活塞杆(611)往复直线运动行程;四个油缸式推杆(61)始终输出一致的或相近的推力。正式一致的或相近的推力可以保证飞行器不倾覆。
[0047]
其中图6一种飞行器的动力系统(2),也可以做图1所示的一种飞行器。
[0048]
动力系统(2);动力系统(2)由气体压缩机(223)、气体压缩机出口(2231)、气体压缩机出气管(2232)、高压气罐(262)、高压气罐进气口(2621)、高压气罐出气口(2622)、高压气罐出气管(2623)、气管a (2351)、气管b(2352)、气体支管a(2353)、气体支管b(2354)、调节阀(24)、旋转换向器(252)、旋转换向器进口 (2521)、旋转换向器出口a(2522)、旋转换向器出口b(2523)、旋转换向器出口c(2524)和旋转换向器出口d(2525)组成;气缸式推杆(62)、气缸式推杆活塞杆(621)、气缸式推杆气口a(622)、气缸式推杆气口b(623)、传动轴(8)、固定轴(9)、直线运动放大器(13)和组合伞伞杆(14)和动力系统(2)组合使用。
[0049]
这里的气缸式推杆(62)是推杆(6)的另一种类型。
[0050]
气体压缩机(223)通过气体压缩机出口(2231)和气体压缩机出气管(2232)连接高压气罐(262)的高压气罐进气口(2621),高压气罐(262)的高压气罐出气口(2622)通过高压气罐出气管(2623)和旋转换向器(252)的旋转换向器进口 (2521)连接;旋转换向器(252)的旋转换向器出口b(2523)通过气管a (2351)和气四个体支管a2353连接各自的气缸式推杆(62)的气缸式推杆气口a(622);旋转换向器(252)的旋转换向器出口a(2522)通过气管b(2352)和四个气体支管b(2354)连接各自的气缸式推杆(62)的气缸式推杆气口b(623);调节阀(24)安装在气体支管b(2354)上。
[0051]
气体压缩机输出的高压气体通过气体压缩机出口(2231)、气体压缩机出气管(2232)和高压气罐(262)的高压气罐进气口(2621)进入高压气罐(262);高压气罐(262)中的高压气体通过高压气罐(262)的高压气罐出气口(2622)、高压气罐出气管(2623)和旋转换向器(252)的旋转换向器进口 (2521)进入旋转换向器(252);进入旋转换向器(252)的高压气体,通过旋转换向器(252)进行气体分配,气体经过旋转换向器出口a (2522)、气管a (2351)、四个气体支管a(2353)和各自的气缸式推杆(62)的气缸式推杆气口a(622)进入气缸式推杆(62)的大腔,同时气缸式推杆(62)的小腔中的气体通过各自的气缸式推杆(62)的气缸式推杆气口b(623)、四个气体支管b(2354)、气管b(2352)和旋转换向器(252)的旋转换向器出口b(2523)进入旋转换向器(252),从旋转换向器(252)的旋转换向器出口c(2524)排出;四个气缸式推杆(62)在气体作用下一致伸出气缸式推杆活塞杆(621);气体经过旋转换向器出口b(2523)、气管b(2352)、四个气体支管b(2354)和各自的气缸式推杆(62)的气缸式推杆气口b进入气缸式推杆(62)的小腔中,气缸式推杆(62)的大腔中的气体通过各自的气
缸式推杆(62)的气缸式推杆气口a(622)、四个气体支管a(2353)、气管a (2351)、和旋转换向器(252)的旋转换向器出口a进入旋转换向器(252),再从旋转换向器(252)的旋转换向器出口d(2525)排出;四个气缸式推杆(62)在气体作用下一致缩入气缸式推杆活塞杆(621);旋转换向器(252)一个转换周期,控制在气缸式推杆活塞杆(621)最大行程内,可以通过调节阀(24)调节气缸式推杆活塞杆(621)的行程。
[0052] 气体压缩机(223)通过气体压缩机出口(2231)、气体压缩机出气管(2232)、高压气罐(262)、高压气罐进气口(2621)、高压气罐出气口(2622)、高压气罐出气管(2623)、气管a (2351)、气管b(2352)、气体支管a(2353)、气体支管b(2354)、旋转换向器(252)、旋转换向器进口 (2521)、旋转换向器出口a(2522)、旋转换向器出口b(2523)、旋转换向器出口c(2524)和旋转换向器出口d(2525)把旋转运动转换成四个气缸式推杆(62)的一致的往复直线运动,四个气缸式推杆(62)始终输出一致的或相近的推力。正式一致的或相近的推力可以保证飞行器不倾覆。
[0053] 对于由图1和图4组成的飞行器或图1和图5组成的飞行器或图1和图6组成的飞行器: 飞行器起飞时,先通过水平滑台(4)调节扑翼系统(3)相对飞行器重心的距离,从而实现飞行器四角的扑翼系统(3)的升力和距离重心距离产生的力矩相等;飞行器能平地水平起飞。起飞前调整好力矩平衡,保证飞行器稳定平衡。
[0054]
飞行器的动力系统(2),提供给四个推杆(6)同时同向同行程的直线运动,再通过直线运动放大器(13)传递给四个组合伞(15)同时同向同行程的上下往复运动;四个组合伞(15)同时同向同行程的上下往复运动是飞行器水平平衡的的安全保证。
[0055]
水平滑台(4)相对飞行器的重心距离可以微调,从而使飞行器四角力矩出现力矩差,力矩差使飞行器相对于水平面产生倾斜,倾斜产生动力在水平方向的分力,分力使飞行器水平移动。水平滑台(4)相对飞行器的重心距离的微调,不会因操作失误,使飞行器突然失去飞行水平平衡。
[0056]
飞行器结构简单,操控容易,允许操控失误。
[0057]
如图2、图7和图8所示:一种飞行器,由机体(1)、动力系统(2)、扑翼系统(3)和自传机(16)组成;扑翼系统(3)由水平滑台(4)、组合伞伞架(5)、马达(7)、传动轴(8)、固定轴(9)、摇臂(10)、摇杆(11)、连杆(12)、直线运动放大器(13)、组合伞伞杆(14)和组合伞(15)组成;机体(1)上安装一套动力系统(2);扑翼系统(3)相对于机体(1)对称布置在机体(1)的四角;扑翼系统(3)的4个水平滑台(4)分别安装在机体(1)的四角;每个水平滑台(4)的动平台上安装一个组合伞伞架(5),组合伞伞架(5)可以跟随水平滑台(4)的动平台移动,从而带动马达(7)、传动轴(8)、固定轴(9)、摇臂(10)、摇杆(11)、连杆(12)、直线运动放大器(13)、组合伞伞杆(14)和组合伞(15)一起移动;每个组合伞伞架(5)上安装有马达(7)、固定轴(9)和组合伞伞杆,每个直线运动放大器(13)通过对应的固定轴(9)安装在对应的组合伞伞架(5)上;直线运动放大器(13)和马达(7)通过摇臂(10)、摇杆(11)和连杆(12)驱动的传动轴(8)连接在一起。
[0058]
马达(7)通过摇臂(10)、摇杆(11)和连杆(12)把马达(7)的旋转运动转换成往复直线运动递给传动轴(8),传动轴(8)再把往复直线运动传递给直线运动放大器(13),直线运动放大器(13)把传动轴(8)的短程直线运动成倍放大;组合伞伞杆(14)可以在组合伞伞架(5)上滑动,组合伞伞杆(14)的一端安装在直线运动放大器(13)上,另一端安装组合伞
(15),组合伞伞杆(14)把直线运动放大器(13)放大的直线运动传递给组合伞(15),让组合伞(15)向上直线运动或向下直线运动,形成扑翼;自传机(16)安装在机体(1)上,提供机体(1)自转的动力。
[0059]
其中图7一种飞行器的动力系统(2),可以做图2所示的一种飞行器的动力系统(2);动力系统(2)由旋转式油泵(221)、旋转式油泵进口(2211)、旋转式油泵出口(2212)、旋转式油泵进油管(2213)、高压油罐(261)、高压油罐进油口(2611)、高压油罐出油口(2612)、高压油罐进油管(2613)、油管e(2321)、油管f(2322)、油支管c(2323)、油支管d(2324)、调节阀(24)和油罐27组成 ;液压马达(71)、液压马达进口(711)、液压马达出口(712)、传动轴(8)、固定轴(9)、摇臂(10)、摇杆(11)、连杆(12)、直线运动放大器(13)、组合伞伞杆(14)和动力系统(2)组合使用。
[0060]
这里的液压马达(71)是马达(7)的一种类型。
[0061]
旋转式油泵(221)通过旋转式油泵进口(2211)连接旋转式油泵进油管(2213),旋转式油泵进油管(2213)深入到油罐27中;旋转式油泵(221)通过旋转式油泵出口(2212)、高压油罐进油管(2613)和高压油罐进油口(2611)连接高压油罐(261);高压油罐(261)通过高压油罐出油口(2612)、油管e(2321)、油支管c和液压马达(71)的液压马达进口(711)连接,液压马达(71)的液压马达出口(712)通过油支管d(2324)和油管f(2322)连接,油管f(2322)伸入到油罐27中;调节阀(24)安装在油支管d(2324)上。
[0062]
旋转式油泵(221)通过旋转式油泵出口(2212)、高压油罐进油管(2613)和高压油罐进油口(2611)把高压油注入高压油罐(261),高压油罐(261)中的高压油通过高压油罐出油口(2612)、油管e(2321)、四个油支管c和各自的液压马达(71)的液压马达进口(711)进入到液压马达(71),推动各自的液压马达(71)转动,做功后的高压油又通过液压马达(71)的液压马达出口(712)、油支管d(2324)和油管f(2322)排入油罐27中;调节阀(24)可以调节流过液压马达(71)的油量,从而控制液压马达(71)转速。
[0063]
旋转式油泵(221)通过旋转式油泵进口(2211)、旋转式油泵出口(2212)、旋转式油泵进油管(2213)、高压油罐(261)、高压油罐进油口(2611)、高压油罐出油口(2612)、高压油罐进油管(2613)、油管e(2321)、油管f(2322)、油支管c(2323)、油支管d(2324)、调节阀(24)和油罐27驱动四个液压马达(71)以相同或相近速度运转,动力小时,四个液压马达(71)也同时停止运转。正式一致的或相近的推力可以保证飞行器不倾覆。
[0064] 其中图8一种飞行器的动力系统(2),也可以做图2所示的一种飞行器的动力系统(2);动力系统(2)由气体压缩机(223)、气体压缩机出口(2231)、气体压缩机出气管(2232)、高压气罐(262)、高压气罐进气口(2621)、高压气罐出气口(2622)、气管c(2341)、气体支管c (2343)和调节阀(24)组成;气体马达(72)、气体马达进口(721)、气体马达出口(722)、传动轴(8)、固定轴(9)、摇臂(10)、摇杆(11)、连杆(12)、直线运动放大器(13)、组合伞伞杆(14)和动力系统(2)组合使用。
[0065]
气体压缩机(223)通过气体压缩机出口(2231)、气体压缩机出气管(2232)和高压气罐(262)的高压气罐进气口(2621)连接,高压气罐出气口(2622)通过气管c(2341)、四个气体支管c (2343)和各自的气体马达(72)的气体马达进口(721)连接,气体马达(72)的气体马达出口(722)连接调节阀(24)。
[0066]
这里的气体马达(72)是马达(7)的另一种类型。
[0067] 气体压缩机(223)产生的高压气体通过气体压缩机出口(2231)、气体压缩机出气管(2232)和高压气罐(262)的高压气罐进气口(2621)进入高压气罐(262),高压气罐(262)中的高压气体在通过高压气罐出气口(2622)通过气管c(2341)、四个气体支管c (2343)和各自的气体马达(72)的气体马达进口(721)进入气体马达(72),驱动气体马达(72)旋转做功,做功后的气体通过气体马达(72)的气体马达出口(722)和调节阀(24)排出;调节阀(24)可以调节气体马达(72)的转速。
[0068]
对于由图2和图7组成的飞行器或图2和图8组成的飞行器:飞行器起飞时,先通过水平滑台(4)调节扑翼系统(3)相对飞行器重心的距离,从而实现飞行器四角的扑翼系统(3)的升力和距离重心距离产生的力矩相等;飞行器能平地水平起飞。起飞前调整好力矩平衡,保证飞行器稳定平衡平地水平起飞。
[0069]
飞行器的动力系统(2),提供给四个马达(7)统一的动力,使四个马达(7)同时同速运行,同时同速的马达(7)通过摇臂(10)、摇杆(11)、连杆(12)和直线运动放大器(13)传递给组合伞(15)同时同向同行程的上下往复直线运动,是飞行器水平平衡的的安全保证;水平滑台(4)相对飞行器的重心距离可以微调,从而使飞行器四角力矩出现力矩差,力矩差使飞行器相对于水平面产生倾斜,倾斜产生动力在水平方向的分力,分力使飞行器水平移动。水平滑台(4)相对飞行器的重心距离的微调,不会因操作失误,使飞行器突然失去飞行水平平衡。
[0070]
飞行器结构简单,操控容易,允许操控失误。
[0071]
如图3、图4、图5和图6所示:一种飞行器由由机体(1)、动力系统(2)和扑翼系统(3)组成;扑翼系统(3)由组合伞伞架(5)、推杆(6)、传动轴(8)、固定轴(9)、直线运动放大器(13)、组合伞伞杆(14)和组合伞(15)组成;机体(1)上安装一套动力系统(2);扑翼系统(3)相对于机体(1)对称布置在机体(1)的四角;扑翼系统(3)的4个组合伞伞架(5)分别安装在机体(1)的四角;每个组合伞伞架(5)上安装有推杆(6)、固定轴(9)和组合伞伞杆,每个直线运动放大器(13)通过对应的固定轴(9)安装在对应的组合伞伞架(5)上;直线运动放大器(13)和推杆(6)通过传动轴(8)连接在一起,推杆(6)通过传动轴(8)把推杆(6)的直线运动传递给直线运动放大器(13),直线运动放大器(13)把推杆(6)的短程直线运动成倍放大;组合伞伞杆(14)可以在组合伞伞架(5)上滑动,组合伞伞杆(14)的一端安装在直线运动放大器(13)上,另一端安装组合伞(15),组合伞伞杆(14)把直线运动放大器(13)放大的直线运动传递给组合伞(15),让组合伞(15)向上直线运动或向下直线运动,形成扑翼。
[0072]
飞行器起飞时,先通过调节阀(24)调节推杆(6)的行程,从而实现飞行器四角的扑翼系统(3)的升力和距离重心距离产生的力矩相等;飞行器能平地水平起飞。
[0073]
飞行器的动力系统(2),提供给四个推杆(6)同时同向同行程的直线运动,再通过直线运动放大器(13)传递给四个组合伞(15)同时同向同行程的上下往复运动;四个组合伞(15)同时同向同行程的上下往复运动是飞行器的安全保证; 推杆(6)可以从动力系统3内部通过调节阀(24)微调节组合伞(15)同时同向上下往复运动的行程,从而使飞行器四角力矩出现力矩差,力矩差使飞行器相对于水平面产生倾斜,倾斜产生动力在水平方向的分力,分力使飞行器水平移动。
[0074]
飞行器可以四个方向飞行不设自转。安装的相机或驾驶舱可以自行自转。
[0075]
图4、图5和图6所示的动力系统(2)可以作为图3所示的飞行器的动力系统(2)。
[0076]
如图9、图10和图11所示:扑翼系统(3)的组合伞(15)由组合伞框架(151)、布袋固定绳(153)和布袋(152)组成;布袋(152)由布(1521)、固定孔(1522)和气孔1523组成; 布袋固定绳(153)安装在组合伞框架(151)上,众多布袋(152)通过布袋(152)上的安装孔1522把布袋(152)通过布袋固定绳(153)安装在组合伞框架(151)上;组合伞(15)上下往复运动,组合伞(15)向上运动时,布袋(152)两侧的布(1521)在空气阻力压力作用下相对运动,布袋(152)开口趋向闭合,布袋(152)变瘦小,挤出布袋(152)内的大量空气;布袋(152)口趋向闭合,开口正面迎击空气面积减到很小,减少了空气阻力,同时布袋(152)内大量空气被挤出,只有少量的空气留在布袋(152)内并被加速。组合伞(15)向下运动时,布袋(152)灌入空气,其两侧的布(1521)在空气压力作用下相向运动,布袋(152)开口趋向张开,布袋(152)变肥胖,布袋(152)内灌入大量空气;布袋(152)口张开,开口正面迎击空气面积增大,增大了空气阻力,布袋(152)内灌入的大量空气随布袋向下运动被加速。组合伞(15)上行运动和下行运行,产生的反作用力差,差别巨大,反作用力的差,就提供了飞行器的升力。
[0077]
布袋(152)的气孔1523可以在布袋(152)向下运动时,继续挤出灌入布袋(152)的被加速的空气,从而使新的空气继续灌入布袋,并被加速,以提供更多的反作用力。组合伞框架(151)可以是水平框架,也可以是倾斜框架。众多布袋152水平布置或倾斜布置。倾斜布置布袋152,当飞行器飞行时,众多布袋152的开口和水平面有一个夹角,整个组合伞(15)就形成一个固定翼,提升飞行器的升力。