1.本实用新型涉及无人机机巢领域,尤其涉及一种用于无人机机巢的归中结构及无人机机巢。
背景技术:
2.无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器。无人机实际上是无人驾驶飞行器的统称。无人机由于在工作过程中需要电池供电,因此,在无人机飞行一段时间后需要对无人机进行充电。
3.在野外的无人机需要通过无人机机巢进行充电,在充电时,需要将无人机置于机巢中间,无人机机巢一般安装有归中结构,用于将无人机置于机巢的中心,目前的归中结构主要采用丝杠结构,这种丝杠结构的结构复杂程度较高,其重量较重,增加了机巢的重量,因此,本技术提出了一种无人机机巢的归中结构及无人机机巢。
技术实现要素:
4.本实用新型的目的在于提供一种用于无人机机巢的归中结构及无人机机巢,以解决目前无人机机巢中归中结构结构复杂、重量大的问题。
5.为实现上述目的,本实用新型提供如下技术方案:
6.一种用于无人机机巢的归中结构,安装于无人机机巢内部的飞行平台上,所述归中结构包括:
7.设于所述飞行平台上的两组归中单元,用于将无人机移动到所述飞行平台的中心;
8.所述归中单元包括:
9.转动连接于所述飞行平台上的主动轮和第一从动轮,所述主动轮和第一从动轮上套设有皮带,所述皮带与所述飞行平台平行且位于不同的所述归中单元上的所述皮带垂直;
10.位于所述皮带上靠近所述主动轮的一端的第一推杆和位于所述皮带靠近所述第一从动轮的一端的第二推杆,所述皮带在转动时带动所述第一推杆和所述第二推杆互相靠近或远离,所述第一推杆和所述第二推杆与所述飞行平台平行且所述第一推杆和所述第二推杆与所述皮带垂直;
11.固定连接于所述飞行平台上的归中电机,用于带动所述主动轮转动。
12.进一步的,位于不同归中单元上的所述第一推杆和所述第二推杆与所述飞行平台之间的距离不同。
13.进一步的,所述归中单元还包括:
14.设于所述飞行平台上的张紧轮,用于提高所述皮带的松紧度。
15.进一步的,所述主动轮和所述第一从动轮为齿带轮,所述皮带为带齿皮带结构,所述皮带与所述主动轮和所述第一从动轮啮合。
16.进一步的,所述归中单元还包括:
17.转动连接于所述飞行平台上的第二从动轮,所述第二从动轮设于所述皮带的内侧,所述第二从动轮为齿带轮结构,所述第二从动轮与所述皮带的内侧啮合。
18.进一步的,所述归中结构还包括:
19.设于所述飞行平台上的推杆支撑单元,用于对所述第一推杆和所述第二推杆限位。
20.进一步的,所述推杆支撑单元包括:
21.转动连接于所述飞行平台上的第三从动轮和第四从动轮,所述第三从动轮和所述第四从动轮设于所述飞行平台上远离所述归中单元的一侧;
22.套设于所述第三从动轮和所述第四从动轮上的支撑皮带,所述第一推杆和所述第二推杆固定连接于所述支撑皮带上,所述支撑皮带与所述飞行平台和所述皮带平行。
23.进一步的,所述推杆支撑单元还包括:
24.设于所述飞行平台上的第二张紧轮,用于张紧所述支撑皮带。
25.进一步的,所述推杆支撑单元包括:
26.固定连接于所述飞行平台上的滑轨,所述滑轨与所述皮带平行;
27.分别固定连接于所述第一推杆和所述第二推杆上的第一滑轮和第二滑轮,所述第一滑轮和所述第二滑轮滚动连接于所述滑轨上,所述第一滑轮和所述第二滑轮均为工字轮或v形轮。
28.一种无人机机巢,包括上述任意一项所述的用于无人机机巢的归中结构,还包括:
29.机巢本体,所述机巢本体内设置有所述飞行平台。
30.综上所述,本实用新型与现有技术相比具有以下有益效果:
31.本实用新型公开的用于无人机机巢的归中结构采用皮带和皮带轮的结构带动所述第一推杆和所述第二推杆对无人机进行归中操作,摒弃了丝杠结构,降低了归中结构的复杂程度,使其简单化,同时降低归中结构的重量。
附图说明
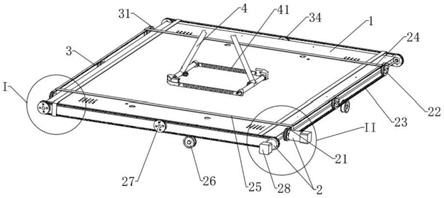
32.图1为本实用新型提供的一种无人机归中结构的结构示意图。
33.图2为图1中i处的局部放大图。
34.图3为图1中ii处的局部放大图。
35.附图标记:1-飞行平台,2-归中单元,21-主动轮,22-第一从动轮,23-皮带,24-第一推杆,25-第二推杆,26-张紧轮,27-第二从动轮,28-归中电机, 3-推杆支撑单元,31-第三从动轮,32-第四从动轮,33-支撑皮带,4-无人机脚架,41-脚架挡板。
具体实施方式
36.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例,基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
37.实施例1
38.本实用新型的一个实施例提供的一种用于无人机机巢的归中结构,安装于无人机机巢内部的飞行平台1上,如图1-图3所示,所述归中结构包括:
39.设于所述飞行平台1上的两组归中单元2,两组所述归中单元2垂直设置,用于将无人机移动到所述飞行平台1的中心;
40.所述归中单元2包括:
41.转动连接于所述飞行平台1上的主动轮21和第一从动轮22,所述主动轮 21和第一从动轮22上套设有皮带23,所述皮带23与所述飞行平台1平行且位于不同的所述归中单元2上的所述皮带23垂直;
42.位于所述皮带23上靠近所述主动轮21的一端的第一推杆24和位于所述皮带23靠近所述第一从动轮22的一端的第二推杆25,所述皮带23在转动时带动所述第一推杆24和所述第二推杆25互相靠近或远离,所述第一推杆24和所述第二推杆25与所述飞行平台1平行且所述第一推杆24和所述第二推杆25与所述皮带23垂直;
43.固定连接于所述飞行平台1上的归中电机28,用于带动所述主动轮21转动;
44.在本实施例中,当无人机落到所述飞行平台1上时,所述无人机机巢内的控制单元控制所述归中电机28启动,所述归中电机28启动时带动所述主动轮 21转动,所述主动轮21转动时带动所述皮带23转动,在所述皮带23转动时,所述皮带23带动所述第一推杆24和所述第二推杆25互相靠近,在所述第一推杆24和所述第二推杆25互相靠近的过程中,所述第一推杆24和所述第二推杆 25逐渐将所述无人机移动到所述飞行平台1的中间,其移动方式为通过所述第一推杆24或所述第二推杆25推动位于无人机上的无人机脚架4移动,使得无人机在所述飞行平台1上移动;由于所述归中单元2设置有两组,且两组所述归中单元2互相垂直,在两组所述归中单元2同时工作时,能够将无人机移动到所述飞行平台1的中心;
45.在一些示例中,所述飞行平台1为方形板,两组所述归中单元2分别设置于所述飞行平台1上相邻的两斜边上,所述主动轮21和所述第一从动轮22转动连接于所述飞行平台1上安装所述归中单元2的一边的两端;
46.所述第一推杆24和所述第二推杆25分别固定连接于所述皮带23位于所述主动轮21和所述第一从动轮22轴心连线的两侧;
47.作为本实施例中进一步的解释,当所述飞行平台1水平放置时,所述皮带 23平行设置,所述皮带23位于所述主动轮21上侧的一段,本实施例中称之为上段,位于所述主动轮21下侧的一段,本实施例中称之为下段,在所述皮带23 转动时,所述上段和所述下段的移动方向相反,而所述第一推杆24和所述第二推杆25分别固定连接于所述上段和所述下段上,例如,本实施例中,所述第一推杆24固定连接于所述皮带23的上段上,所述第二推杆25固定连接于所述第一推杆24的下段上,所述第二推杆25为l形条
48.作为本实施例中一种优选的方式,为了防止位于不同的所述归中单元2上的所述第一推杆24和所述第二推杆25干涉,位于不同归中单元2上的所述第一推杆24和所述第二推杆25与所述飞行平台1之间的距离不同;
49.作为本实施例中一种优选的方式,所述无人机脚架4上还设置有脚架挡板 41,在对无人机归中时,其中一组归中单元2上的所述第一推杆24或所述第二推杆25抵接在所述脚架挡板41上;
50.作为本实施例中一种优选的方式,所述归中单元2还包括:
51.设于所述飞行平台1上的张紧轮26,用于提高所述皮带23的松紧度;
52.在一些示例中,所述张紧轮26转动连接于一张紧支架(图中未画出)上,所述张紧支架铰接于所述飞行平台1上,且所述张紧支架与所述飞行平台1之间还连接有拉簧,所述拉簧通过所述飞行平台1将所述张紧轮26压紧在所述推杆支撑单元3上,此处结构可以参照现有技术中张紧装置;
53.作为本实施例再一个优选的实施方式,所述主动轮21和所述第一从动轮22 为齿带轮,所述皮带23为带齿皮带结构,所述皮带23与所述主动轮21和所述第一从动轮22啮合;
54.作为本实施例再一个优选的实施方式,所述归中单元2还包括:
55.转动连接于所述飞行平台1上的第二从动轮27,所述第二从动轮27设于所述皮带23的内侧,所述第二从动轮27为齿带轮结构,所述第二从动轮27与所述皮带23的内侧啮合,用于减小所述皮带23的变形;
56.所述第二从动轮27设于所述皮带23的内侧,能够支撑所述皮带23,防止所述皮带23因重力产生变形。
57.实施例2
58.在本实用新型的一个实施例中,如图1-图3所示,所述归中结构还包括:
59.设于所述飞行平台1上的推杆支撑单元3,用于对所述第一推杆24和所述第二推杆25限位;
60.在本实施例中,所述推杆支撑单元3包括:
61.转动连接于所述飞行平台1上的第三从动轮31和第四从动轮32,所述第三从动轮31和所述第四从动轮32设于所述飞行平台1上远离所述归中单元2的一侧;
62.套设于所述第三从动轮31和所述第四从动轮32上的支撑皮带33,所述第一推杆24和所述第二推杆25固定连接于所述支撑皮带33上,所述支撑皮带33 与所述飞行平台1和所述皮带23平行;
63.在所述第一推杆24和所述第二推杆25移动时,所述第一推杆24和所述第二推杆25带动所述支撑皮带33转动,所述支撑皮带33转动时,所述第三从动轮31和所述第四从动轮32对所述支撑皮带33进行限位,防止所述支撑皮带33 偏转,从而对所述第一推杆24和所述第二推杆25限位,防止所述第一推杆24 和所述第二推杆25偏转,所述第一推杆24和所述第二推杆25分别连接到所述第三从动轮31和所述第四从动轮32的轴心连线的不同侧,例如,当所述飞行平台1水平放置时,所述第一推杆24连接于所述支撑皮带33位于上方的一侧,所述第二推杆25连接于所述支撑皮带33位于下方的一端;
64.作为本实施例中一种优选的实施方式,所述推杆支撑单元3还包括:
65.设于所述飞行平台1上的第二张紧轮(图中未画出),所述第二张紧轮与所述飞行平台1和所述支撑皮带33的连接方式与所述张紧轮26相同;
66.作为本实施例中再一个优选的实施方式,所述推杆支撑单元3还包括:
67.设于所述飞行平台1上的34,所述34与所述飞行平台1和所述支撑皮带33的连接方式与所述第一推杆24相同;
68.需要说明的是,本实施例中,所述推杆支撑单元3还可以为其他结构,例如,所述推杆支撑单元3包括:
69.固定连接于所述飞行平台1上的滑轨,所述滑轨与所述皮带23平行;
70.分别固定连接于所述第一推杆24和所述第二推杆25上的第一滑轮和第二滑轮,所述第一滑轮和所述第二滑轮滚动连接于所述滑轨上,所述第一滑轮和所述第二滑轮均为工字轮或v形轮。
71.实施例3
72.本发明还公开了一种无人机机巢,所述无人机机巢包括:
73.机巢本体,所述机巢本体内设置有所述飞行平台1;
74.设于所述飞行平台1上的归中结构,所述归中结构与上述任意一个实施例公开的无人机机巢归中结构相同。
75.综上所述,本发明实施例提供了一种用于无人机机巢的归中结构及无人机机巢,其中,所述归中结构包括:
76.设于所述飞行平台1上的两组归中单元2,两组所述归中单元2垂直设置,用于将无人机移动到所述飞行平台1的中心;
77.所述归中单元2包括:
78.转动连接于所述飞行平台1上的主动轮21和第一从动轮22,所述主动轮 21和第一从动轮22上套设有皮带23,所述皮带23与所述飞行平台1平行且位于不同的所述归中单元2上的所述皮带23垂直;
79.位于所述皮带23上靠近所述主动轮21的一端的第一推杆24和位于所述皮带23靠近所述第一从动轮22的一端的第二推杆25,所述皮带23在转动时带动所述第一推杆24和所述第二推杆25互相靠近或远离,所述第一推杆24和所述第二推杆25与所述飞行平台1平行且所述第一推杆24和所述第二推杆25与所述皮带23垂直;
80.本实施例中,所述归中结构采用皮带和皮带轮的结构带动所述第一推杆24 和所述第二推杆25对无人机进行归中操作,摒弃了丝杠结构,降低了归中结构的复杂程度,使其简单化,同时降低归中结构的重量。
81.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。