1.本发明属于无人机技术领域,具体涉及一种螺旋桨无人机自主起飞越障能力分析方法。
背景技术:
2.随着我国通用航空的高速发展,通用机场越来越多,但各机场跑道长度、升降带、净空区障碍物情况存在显著差异,需要对不同起飞能力的飞机进行适用性分析以保障飞行安全。尽管中国民航适航规定ccar23和ccar25对螺旋桨飞机的起飞性能和起飞航迹都作了具体的规定,甚至给出了方法名称,但没有明确方法的设计思路和计算流程。
3.不同于有人机,无人机的起飞过程由程序设定自主起飞逻辑实现,需要基于不同重量、不同构型和不同海拔高度(不同功率)下的起飞性能和越障能力的分析结果,设计自主起飞逻辑。尤其是,低速螺旋桨无人机自身起飞能力弱,受自主起飞逻辑控制,其在不同通航机场条件的使用能力存在不确定性,起飞安全受到威胁,甚至造成严重的财产和生命损失,需要进行与通航机场条件适用性的精确计算和分析。通航机场低速螺旋桨无人机短跑道起飞越障场景如图1所示。
技术实现要素:
4.本发明的目的在于,为克服现有技术缺陷,提供了一种螺旋桨无人机自主起飞越障能力分析方法。
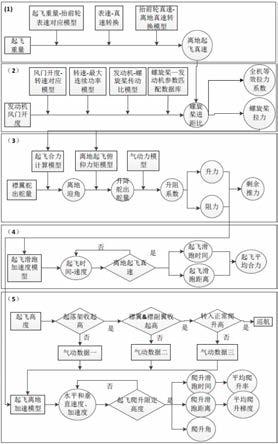
5.本发明目的通过下述技术方案来实现:一种螺旋桨无人机自主起飞越障能力分析方法,包括以下步骤:s1、通过无人机起飞重量计算离地起飞真速;s2、根据离地起飞真速和发动机风门开度计算螺旋桨进距比,并根据螺旋桨进距比计算全机等效拉力系数和螺旋桨拉力;s3、根据全机等效拉力系数、螺旋桨拉力以及襟翼舵出舵量计算升力和阻力,并根据升力和阻力计算剩余推力;s4、根据升力和阻力计算起飞滑跑时间和起飞滑跑距离,并根据起飞滑跑时间和起飞滑跑距离计算起飞平均合力;s5、根据升力、阻力以及起飞高度计算平均爬升率、平均爬升梯度和爬升角,进而得到滑跑和爬升所需的总时间和总距离。
6.前述本发明主方案及其各进一步选择方案可以自由组合以形成多个方案,均为本发明可采用并要求保护的方案。本领域技术人员在了解本发明方案后根据现有技术和公知常识可明了有多种组合,均为本发明所要保护的技术方案,在此不做穷举。
7.本发明的有益效果:本发明提出了一种螺旋桨无人机自主起飞越障能力的计算和分析方法,该方法通用性强,符合ccar23和ccar25规定的多种螺旋桨飞机,也符合起飞能力更弱的低速螺旋桨无人机,经过无人机实际飞行验证,数据准确可用。
附图说明
8.图1是背景技术中短跑道起飞越障场景示意图;图2是本发明流程示意图;图3是本发明离地起飞受力分析示意图;图4是本发明爬升受力分析示意图;图5是本发明无人机不同重量起飞爬升航迹示意图。
具体实施方式
9.以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
10.需要说明的是,为使本发明实施例的目的、技术方案和优点更加清楚,下面对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。
11.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
12.此外,术语“水平”、“竖直”、“悬垂”等术语并不表示要求部件绝对水平或悬垂,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。
13.在本发明的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
14.另外,本发明要指出的是,本发明中,如未特别写出具体涉及的结构、连接关系、位置关系、动力来源关系等,则本发明涉及的结构、连接关系、位置关系、动力来源关系等均为本领域技术人员在现有技术的基础上,可以不经过创造性劳动可以得知的。
15.实施例1:参考图2所示,本发明公开了一种螺旋桨无人机自主起飞越障能力分析方法,包括以下步骤:s1、通过无人机起飞重量计算离地起飞真速:根据试飞数据建立的海平面标准大气压下起飞重量与抬前轮表速对应关系,对无人机起飞重量mass进行插值得到抬前轮表速,再根据海平面标准大气密度和机场大气密度将抬前轮表速转换为抬前轮真速,所述抬前轮真速的计算
公式为:根据无人机抬前轮真速与离地真速转换模型计算离地真速,其计算公式为:上式中,kvt为离地真速转换模型的转换因子。
16.s2、根据离地起飞真速和发动机风门开度计算螺旋桨进距比,并根据螺旋桨进距比计算全机等效拉力系数和螺旋桨拉力:将无人机滑跑起飞时发动机的风门开度设定为dtr,根据无人机试飞数据建立的发动机风门开度与转速对应关系(风门开度-转速对应模型),对dtr进行插值得到插值发动机转速rpmr,选定转速-最大连续功率模型,将转速代入该模型得到最大连续功率engpor,根据该无人机螺旋桨-发动机匹配关系,计算发动机输出至螺旋桨做功功率engpr,计算公式为:其中,kp为由试飞数据分析得到的发动机功率修正系数,aeropresrec为发动机进气道总压恢复系数,为单台发动机提取功率。
17.根据发动机-螺旋桨传动比模型确定传动比,并计算螺旋桨功率系数cpr和螺旋桨进距比lagr,计算公式为:计算公式为:上式中,r为螺旋桨直径。
18.对cpr和lagr进行插值计算得到ctr,根据螺旋桨拉力效率修正模型和无人机理论螺旋桨装机拉力效率计算修正螺旋桨装机拉力效率,并计算螺旋桨拉力tr,计算公式为:计算公式为:上式中,为螺旋桨拉力效率修正模型的修正因子。
19.考虑拉桨滑流影响,根据螺旋桨进距比lagr、机翼参考面积sref和拉桨发动机数
量n,将螺旋桨拉力系数转化为全机等效拉力系数gctr,计算公式为:。
20.s3、根据全机等效拉力系数、螺旋桨拉力以及襟翼舵出舵量计算升力和阻力,并根据升力和阻力计算剩余推力:根据无人机抬前轮时刻的飞行姿态,计算离地升力l、阻力d、气动俯仰力矩mq,图3为无人机离地起飞时刻受力分析示意图。计算公式为:计算公式为:计算公式为:上式中,clr为升力系数,cdr为阻力系数,cmr为俯仰力矩系数,ba为纵向参考弦长。
21.将离地迎角alfr、襟翼舵出舵量betr、升降舵出舵量der、襟翼舵出舵量dfr、襟副翼舵出舵量dfar、机场海拔高度rwhr和全机等效拉力系数gctr,根据风洞实验所得的气动力模型lonuavinterp计算升力系数clr、阻力系数cdr和俯仰力矩系数cmr,计算公式为:将离地起飞时所受的力分解为水平方向上的合力df和垂直方向上的合力f,计算公式为:公式为:上式中,为发动机安装角,为爬升角,初始值为0,随着df的大小发生变化。
22.设定无人机的离地迎角为m度附近,在其他气动数据设定为固定值的情况下,根据函数f(alfr)在m附近的零点计算离地起飞迎角。
23.根据发动机推力产生的俯仰力矩tl、全机重心坐标cgref和发动机重心坐标mcgref以及气动俯仰力矩mq计算离地起飞俯仰力矩,计算公式为:计算公式为:无人机设定的升舵量为n度附近,根据函数在n度的零点计算离地起飞升降舵出舵量,将离地起飞迎角和离地起飞升降舵出舵量带入气动力模型得到升力系数clr和阻力系数cdr,通过升力系数clr和阻力系数cdr计算起飞时的升力、阻力以及剩余推力。
24.起飞滑跑时的升力和阻力计算公式为:计算公式为:其中,y2为滑跑速度。
25.s4、根据升力和阻力计算起飞滑跑时间和起飞滑跑距离,并根据起飞滑跑时间和起飞滑跑距离计算起飞平均合力:无人机自主起飞的风门开度为dtr,若起飞滑跑加速时间t小于风门指令软化时间与达到最大转速时间之和ts,dtr由初始风门开度dt
s0
与最大风门开度dt
max
计算得出,根据步骤s2计算螺旋桨输出拉力和单发全机等效拉力系数。
26.离地迎角alfr为无人机停机角alf0,令y=[y1,y2],y1为滑跑水平距离。
[0027]
根据起飞滑跑时的升力和阻力计算起飞滑跑加速度a,计算公式为:其中, u为跑道滚动摩擦系数,runwayslope为机场跑道坡度,q为中间参数,q的计算公式为:其中,w为无人机起飞重量(n)。
[0028]
根据起飞滑跑加速度a和y可得函数关系a=f(t,y),根据y的初值y=[ (y
10y20 )],可通过积分得到起飞滑跑时间点t的列向量和解数组y,y中的每一行都与t的相应行中返回的时间相对应,y的第一列与y1相对应,第二列与y2相对应;ta为大致预估的起飞滑跑时间,ta大于试飞验证的最大起飞滑跑时间。
[0029]
当y2与离地真速相等时,可得起飞滑跑时间和起飞滑跑距离,进而计算起飞平均合力,计算公式为:。
[0030]
s5、根据升力、阻力以及起飞高度计算平均爬升率、平均爬升梯度和爬升角,进而得到滑跑和爬升所需的总时间和总距离。
[0031]
无人机在爬升阶段的气动数据随起落架、襟翼和襟副翼等收放情况发生变化,在起落架开始收起之前,无人机气动数据设定为气动数据一; 起落架收起到襟翼和襟副翼开始收起之前,无人机气动数据设定为气动数据二;襟翼和襟副翼收起至转入正常爬升高度,
无人机气动数据设定为气动数据三。
[0032]
设定x1为爬升水平距离,x2为水平速度,x3为垂直海拔高度,x4为垂直速度,爬升角γ的计算公式为:根据试飞建立的起飞重量模型得到重量影响因子thetamax。若γ的值不小于thetamax与迎角alfr之差,则对垂直速度进行修正,计算爬升速度vt,计算公式为:利用步骤s2计算出螺旋桨输出拉力和单发全机等效拉力系数,由步骤s3计算爬升时的升力和阻力,将爬升合力分解为水平方向合力f
x
和垂直方向合力fy,图4为爬升受力分析示意图,计算公式为:计算公式为:计算爬升阶段水平方向上的加速度a
x
,垂直方向上的加速度ay和爬升高度hr,计算公式为:公式为:公式为:根据水平速度、水平加速度、垂直速度、垂直加速度可得关系式:根据初值,通过积分得到时间点t的列向量和解数组b,b中的每一行都与t的相应行中返回的时间相对应,b的第一列与b1相对应,第二列与b2相对应,tb为大致预估的爬升时间,tb大于试飞验证的最大爬升时间。
[0033]
当爬升到规定的海拔高度时,可得爬升时间、爬升水平速度、爬升率、爬升水平距离、爬升距离、爬升梯度tgama和轨迹角,计算公式为:计算公式为:
计算滑跑和爬升的总时间和总距离,计算公式为:计算公式为:用不同重量无人机对本方法进行验证, 表1为三种不同重量无人机在起飞过程中的部分性能参数。
[0034]
表1无人机不同起飞重量起飞性能数据
起飞重量(kg)离地表速(km/h)滑跑距离(m)滑跑时间(s)爬升空中段距离(m)爬升空中段时间(s)起飞距离(m)起飞时间(s)重量一13333316248960282276重量二14255924271667327591重量三1591130 4052431176373157
图5为不同重量无人机爬升航迹示意图。试飞机场海拔高度120m,重量一为最小起飞重量,重量二在重量一的基础上加500kg,重量三在重量一的基础上加1000kg。验证结果与试飞情况吻合,可通过本方法对不同通航机场进行无人机起飞越障能力分析。
[0035]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。