1.本发明涉及无人机技术领域,尤其涉及一种适应复杂地形起降的三维建模无人机。
背景技术:
2.无人机可用于空气长时间、大角度、远距离拍摄地面上的视频画面,近年无人机技术的发展迎合了电网对信息化及自动化的需求,使用无人机进行巡检建模,已成为一种趋势。但许多作业环境复杂,障碍物多,且无人机的精准控制较难,现有无人机在降落时遇到松软地面容易出现滑动翻倒,造成无人机损坏,影响作业的正常展开。因此,设计一种能发生滑动及时制动的适应复杂地形起降的三维建模无人机成为了急需解决的技术问题。
技术实现要素:
3.本发明为解决上述问题,提供了一种适应复杂地形起降的三维建模无人机。
4.本实用新型的技术方案,一种适应复杂地形起降的三维建模无人机,包括机身以及支撑架,所述机身连接设有若干机翼,所述支撑架连接设置在机身的底面,所述支撑架包括支撑脚组、缓冲座、缓冲弹簧以及制动轮座;所述缓冲座连接设置在支撑脚组的底端,该缓冲座设有制动勾爪、勾爪座、卡箍以及触发孔,所述勾爪座以及卡箍均固定设置在缓冲座的顶面,该勾爪座的顶端铰接设有转动轴,所述转动轴连接设有制动扭簧,该制动扭簧的两端固定连接勾爪座,所述制动勾爪连接设有l形支撑杆,所述l形支撑杆的一端固定连接转动轴,该l形支撑杆绕转动轴活动至卡箍内,所述触发孔沿竖直方向贯穿缓冲座,该触发孔的位置与制动勾爪的位置相对应;所述制动轮座设有制动轮以及触发杆,所述制动轮连接设置在制动轮座的底面,所述触发杆沿竖直方向固定设置在制动轮座的顶面,该触发杆的顶端竖直向上穿过触发孔;所述缓冲弹簧连接设置在缓冲座以及制动轮座之间。
5.采用上述结构后,无人机降落时,制动轮座上的制动轮与地面接触滑行,同时制动轮座向上压缩缓冲弹簧一同消除受到的冲击力,防止无人机出现翻倒,制动轮座挤压缓冲弹簧使触发杆沿触发孔向上移动,将l形支撑杆从卡箍中顶出,制动扭簧的扭转力使制动勾爪绕转动轴转动,制动勾爪勾住地面,阻止无人机继续滑行,防止无人机遇到凸起障碍物造成翻倒,保护无人机不受损坏;无人机稳定后缓冲弹簧复原,触发杆向下退出触发孔,通过将l形支撑杆转动再次卡入卡箍内,制动扭簧扭转蓄力,制动勾爪与地面分离使,保护无人机下次稳定降落;实现了制动轮座滑行结合缓冲弹簧收缩缓冲消除无人机降落时的冲击力,触发杆将制动勾爪推出卡箍与地面接触,插入地面阻止无人机继续滑动,避免无人机因冲击力或滑行遇到障碍物而翻倒。
6.作为本实用新型的进一步改进,所述支撑脚组包括连接板、一对支撑脚以及收拢弹簧,所述连接板固定设置在机身的底面,所述一对支撑脚的顶端均阻尼铰接连接板,底端均与不同的缓冲座铰接;所述收拢弹簧连接设置在缓冲座之间。
7.采用上述结构后,通过无人机降落时支撑脚向外侧转动并拉伸收拢弹簧,分担降
落产生的冲击力;通过收拢弹簧的弹力拉扯,防止支撑脚转动过度,避免支撑脚的铰接处损坏。
8.作为本实用新型的进一步改进,所述收拢弹簧的外侧套设有保护套筒。
9.采用上述结构后,通过在收拢弹簧的外侧套有保护套筒,收拢弹簧自然状态下收纳在保护套筒内,防止收拢弹簧磨损以及失去弹性。
10.作为本实用新型的进一步改进,所述制动轮座的底面设有制动槽,所述制动轮铰接设置在制动槽内,所述制动槽内固定设有与制动轮接触的阻尼材料。
11.采用上述结构后,通过将制动轮铰接在制动槽内,并通过阻尼材料与制动轮接触,避免无人机降落时的冲击力使制动轮转动过快,防止无人机翻倒产生损坏。
12.作为本实用新型的进一步改进,所述制动勾爪上套设有勾爪保护套。
13.采用上述结构后,通过制动勾爪上套设有勾爪保护套,无人机收纳时避免制动勾爪划伤操作人员,无人机起飞前将勾爪保护套摘下。
附图说明
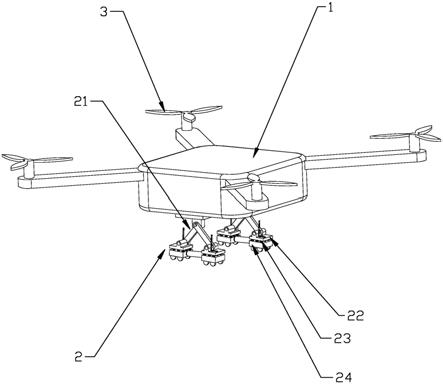
14.图1所示为本实用新型结构示意图。
15.图2所示为支撑架结构示意图。
16.图3所示为制动勾爪打开结构示意图。
[0017]1‑‑
机身,2-支撑架,3-机翼,21-支撑脚组,22-缓冲座,23-缓冲弹簧,24-制动轮座,221-制动勾爪,222-勾爪座,223-卡箍,224-触发孔,241-制动轮,242-触发杆,211-连接板,212-支撑脚,213-收拢弹簧,214-保护套筒。
具体实施方式
[0018]
如图1-图3所示一种适应复杂地形起降的三维建模无人机,包括机身1以及支撑架2,所述机身1连接设有若干机翼3,所述支撑架2连接设置在机身1的底面,所述支撑架2包括支撑脚组21、缓冲座22、缓冲弹簧23以及制动轮座24;所述缓冲座22连接设置在支撑脚组21的底端,该缓冲座22设有制动勾爪221、勾爪座222、卡箍223以及触发孔224,所述勾爪座222以及卡箍223均固定设置在缓冲座22的顶面,该勾爪座222的顶端铰接设有转动轴,所述转动轴连接设有制动扭簧,该制动扭簧的两端固定连接勾爪座222,所述制动勾爪221连接设有l形支撑杆,所述l形支撑杆的一端固定连接转动轴,该l形支撑杆绕转动轴活动至卡箍223内,所述触发孔224沿竖直方向贯穿缓冲座22,该触发孔224的位置与制动勾爪221的位置相对应;所述制动轮座24设有制动轮241以及触发杆242,所述制动轮241连接设置在制动轮座24的底面,所述触发杆242沿竖直方向固定设置在制动轮座24的顶面,该触发杆242的顶端竖直向上穿过触发孔224;所述缓冲弹簧23连接设置在缓冲座22以及制动轮座24之间。
[0019]
无人机降落时,制动轮座24上的制动轮241与地面接触滑行,同时制动轮座24向上压缩缓冲弹簧23一同消除受到的冲击力,防止无人机出现翻倒,制动轮座24挤压缓冲弹簧23使触发杆242沿触发孔224向上移动,将l形支撑杆从卡箍223中顶出,制动扭簧的扭转力使制动勾爪221绕转动轴转动,制动勾爪221勾住地面,阻止无人机继续滑行,防止无人机遇到凸起障碍物造成翻倒,保护无人机不受损坏;无人机稳定后缓冲弹簧23复原,触发杆242向下退出触发孔242,通过将l形支撑杆转动再次卡入卡箍223内,制动扭簧扭转蓄力,制动
勾爪221与地面分离使,保护无人机下次稳定降落;实现了制动轮座24滑行结合缓冲弹簧23收缩缓冲消除无人机降落时的冲击力,触发杆242将制动勾爪221推出卡箍223与地面接触,插入地面阻止无人机继续滑动,避免无人机因冲击力或滑行遇到障碍物而翻倒。
[0020]
所述支撑脚组21包括连接板211、一对支撑脚212以及收拢弹簧213,所述连接板211固定设置在机身1的底面,所述一对支撑脚212的顶端均阻尼铰接连接板211,底端均与不同的缓冲座22铰接;所述收拢弹簧213连接设置在缓冲座22之间。
[0021]
通过无人机降落时支撑脚212向外侧转动并拉伸收拢弹簧213,分担降落产生的冲击力;通过收拢弹簧213的弹力拉扯,防止支撑脚212转动过度,避免支撑脚212的铰接处损坏。
[0022]
所述收拢弹簧213的外侧套设有保护套筒214。
[0023]
通过在收拢弹簧213的外侧套有保护套筒214,收拢弹簧213自然状态下收纳在保护套筒214内,防止收拢弹簧213磨损以及失去弹性。
[0024]
所述制动轮座24的底面设有制动槽,所述制动轮241铰接设置在制动槽内,所述制动槽内固定设有与制动轮241接触的阻尼材料。
[0025]
通过将制动轮241铰接在制动槽内,并通过阻尼材料与制动轮241接触,避免无人机降落时的冲击力使制动轮241转动过快,防止无人机翻倒产生损坏。
[0026]
所述制动勾爪24上套设有勾爪保护套。
[0027]
通过制动勾爪24上套设有勾爪保护套,无人机收纳时避免制动勾爪24划伤操作人员,无人机起飞前将勾爪保护套摘下。