1.本实用新型涉及航天航空飞行器的分离技术领域,特别是指一种用于投放无人机的多级分离系统。
背景技术:
2.目前,飞行器行业迅速发展。在传统的航天所用无人机多级分离结构中,大部分存放无人机的舱体其内部结构要求复杂,不便于生产加工;采用的分离方案会对整个结构产生一定的冲击力影响,同时,在助推飞行器时,不论是采用的固态助推器还是液体助推器,其不仅结构复杂,应用原理也复杂,并且传统助推器其安全性以及经济性也是当前助推器存在的重要问题。
技术实现要素:
3.本实用新型要解决的技术问题是提供一种用于投放无人机的多级分离系统。该系统结构简单且稳定,能够实现无人机快速且稳速的推出舱体。
4.为解决上述技术问题,本实用新型的技术方案如下:
5.一种用于投放无人机的多级分离系统,包括:
6.主体舱体;
7.固定于所述主体舱体内部的推动器;
8.与所述主体舱体的尾部插接固定的尾部减速结构;
9.所述主体舱体内壁上还设置有至少两条导轨;
10.所述至少两条导轨之间沿所述主体舱体内壁上设置有伞绳管路。
11.可选的,所述导轨包括:
12.第一导轨、第二导轨和第三导轨;
13.所述第一导轨、所述第二导轨、所述第三导轨任意两者之间关于所述主体舱体的轴线对称;
14.且所述第一导轨、所述第二导轨、所述第三导轨均具有滑槽,所述滑槽与所述推动器的滑轮结构进行滑动连接。
15.可选的,所述伞绳管路包括:
16.设置于所述第一导轨、所述第三导轨之间的第一伞绳管路;
17.设置于所述第二导轨、所述第三导轨之间的第二伞绳管路;
18.且所述第一伞绳管路、所述第二伞绳管路对称设置于所述主体舱体内壁上。
19.可选的,所述推动器包括:
20.主体安装板;
21.固定于所述主体安装板上的中心接头;
22.与所述中心接头连接的至少两条支撑碳管;
23.所述支撑碳管通过卡箍固定于所述主体安装板上;
24.所述滑轮结构通过转接头与所述支撑碳管固定连接。
25.可选的,所述滑轮结构包括:滑轮、滑轮限位环和轮叉;
26.所述滑轮通过所述滑轮限位环固定在所述轮叉的叉头内部;
27.所述轮叉另一端与转接头固定连接。
28.可选的,所述中心接头上还设置有至少一个伞绳穿过孔。
29.可选的,所述尾部减速结构包括:
30.可分离的多级舱体;
31.固定于所述可分离的多级舱体上的分离翼装置。
32.可选的,所述可分离的多级舱体包括:第一舱体以及与所述第一舱体插接的第二舱体;
33.所述分离翼装置包括第一翼台;
34.与所述第一翼台插接的第二翼台;
35.与所述第二翼台插接的第三翼台;
36.与所述第一翼台以及所述第二翼台插接的第一翼面;
37.与所述第三翼台插接的第二翼面;
38.所述第一翼面与所述第二翼面插接。
39.可选的,所述第二舱体的尾部还插接有尾盖。
40.可选的,用于投放无人机的多级分离系统,还包括头罩;
41.所述头罩与所述主体舱体的头部固定连接。
42.本实用新型的上述方案至少包括以下有益效果:
43.本实用新型的上述方案,通过将主体舱体、推动器以及尾部减速结构三者的结构相互配合设计,并组成多级分离系统。整体分离系统的结构简单,可实现无人机稳速及快速推出。
附图说明
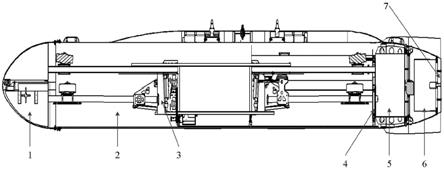
44.图1是本实用新型多级分离系统的剖面图;
45.图2是本实用新型多级分离系统的主体舱体的立体图;
46.图3是本实用新型多级分离系统的推动器的后视图;
47.图4是本实用新型推动器与主体舱体连接示意图;
48.图5是本实用新型多级分离系统的尾部减速结构剖面主视图;
49.图6是本实用新型多级分离系统工作示意图。
50.附图标号说明:1、头罩;2、主体舱体;3、无人子机;4、推动器;5、尾部二级减速结构;6、尾部一级减速结构;7、尾盖;21、第一导轨;22、第二导轨;23、第三导轨;24、第一伞绳管路;25、第二伞绳管路;26、加厚区;71、第一转接头;72、第二转接头;73、第三转接头;81、第一卡箍;82、第二卡箍;83、第三卡箍;91、第一支撑碳管;92、第二支撑碳管;93、第三支撑碳管;41、第一滑轮结构;411、第一滑轮;412、第一滑轮限位环;413、第一轮叉;42、第二滑轮结构;421、第二滑轮;422、第二滑轮限位环;423、第二轮叉;43、第三滑轮结构;431、第三滑轮;432、第三滑轮限位环;433、第三轮叉;10、主体安装板;11、中心接头;12、伞绳穿过孔;13、第一舱体;14、第二舱体;15、豁口;51、第一翼台;52、第二翼台;53、第三翼台;61、第一翼
面;62、第二翼面。
具体实施方式
51.下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
52.如图1和图2所示,本实用新型的实施例提出一种用于投放无人机的多级分离系统,包括:主体舱体2;固定于所述主体舱体2内部的推动器4;与所述主体舱体2的尾部插接固定的尾部减速结构;所述主体舱体2内壁上还设置有至少两条导轨;所述至少两条导轨之间沿所述主体舱体2内壁上设置有伞绳管路。
53.该实施例中,所述主体舱体2、所述推动器4以及所述尾部减速结构组成多级分离系统。在实际应用中,所述推动器4可沿所述导轨推动无人机;所述伞绳管路可用于固定并带动推动器;所述尾部减速结构能使所述推动器4稳速的推动无人机,并为所述推动器4提供动力。本实施例提供的多级系统整体结构简单,可实现无人机稳速及快速推出。
54.本实用新型的一可选实施例中,所述导轨包括:第一导轨21、第二导轨22和第三导轨23;所述第一导轨21、所述第二导轨22、所述第三导轨23任意两者之间关于所述主体舱体2的轴线对称;且所述第一导轨21、所述第二导轨22、所述第三导轨23均具有滑槽,所述滑槽与所述推动器4的滑轮结构进行滑动连接。
55.上述实施例中,所述导轨的长度均适配所述主体舱体2的长度,且所述导轨的形状及大小完全一致,用“第一”、“第二”、“第三”描述只是为了便于区分所述导轨,并不对所述导轨的大小及位置做限定。
56.如图2所示,所述第一导轨21、所述第二导轨22分布于所述主体舱体2的中上部内壁上,所述第三导轨23分布于所述主体舱体2的下部内壁上;且所述第一导轨21与所述第二导轨22关于所述主体舱体2轴线对称,所述第一导轨21与所述第三导轨23关于所述主体舱体2轴线对称,所述第二导轨22与所述第三导轨23关于所述主体舱体2轴线对称;所述第一导轨21、所述第二导轨22和所述第三导轨23的两侧均具有两条穿线管,便于舱体内部布线、走线,防止无人机在存储、转运、投放的过程中机臂及其他部件与电线缠绕。
57.由图2可以看出,所述第一导轨21、所述第二导轨22、所述第三导轨23在所述主体舱体2的内部空间结构上呈三棱柱状,此种结构保证了所述导轨在与所述推动器4滑动连接时的稳定性。同时,所述第一导轨21、所述第二导轨22、所述第三导轨23上设计的滑槽结构适配无人机推动器的滑轮,与所述推动器4进行滑动连接,保证了无人机推动器能够将无人机快速且无障碍的推出所述主体舱体2。
58.本实用新型的一可选实施例中,所述伞绳管路包括:设置于所述第一导轨21、所述第三导轨23之间的第一伞绳管路24;设置于所述第二导轨22、所述第三导轨23之间的第二伞绳管路25;且所述第一伞绳管路24、所述第二伞绳管路25对称设置于所述主体舱体2内壁上。
59.在该实施例中,所述伞绳管路的长度适配所述主体舱体2的长度;同样的,所述伞绳管路的形状及大小完全一致,用“第一”、“第二”描述只是为了便于区分所述伞绳管路,并
不对所述伞绳管路的大小及位置做限定。所述伞绳管路设置于所述导轨之间,且所述第一伞绳管路24与所述第二伞绳管路25位置对称,同时所述第一伞绳管路24与所述第二伞绳管路25也关于所述主体舱体2轴线对称。
60.本实用新型的一可选实施例中,对推动器进行展开说明。所述推动器4包括:主体安装板10;固定于所述主体安装板10上的中心接头11;与所述中心接头11连接的至少两条支撑碳管;所述支撑碳管通过卡箍固定于所述主体安装板上10;所述滑轮结构通过转接头与所述支撑碳管固定连接。
61.该实施例中,如图4所述,所述主体安装板10为适配连接圆桶状结构的舱体,主体安装板10设计为不规则的六边形结构,便于主体安装板10与所述主体舱体2的安装。以所述主体安装板10作为支撑板,将所述支撑碳管与固定在主体安装板10上的中心接头11固定连接,所述支撑碳管通过卡箍固定于主体安装板上10上,所述支撑碳管的一端通过转接头与所述滑轮结构固定连接。该装置保证了所述推动器4主体结构的稳定性。
62.所述支撑碳管包括:第一支撑碳管91、第二支撑碳管92、第三支撑碳管93,所述滑轮结构包括:第一滑轮结构41、第二滑轮结构42、第三滑轮结构43;所述卡箍包括:第一卡箍81、第二卡箍82、第三卡箍83;所述转接头包括:第一转接头71、第二转接头72、第三转接头73。
63.如图3所示,具体的:所述第一滑轮结构41通过第一转接头71与第一支撑碳管91固定连接,且所述第一支撑碳管91与所述中心接头11的第一边固定连接;所述第二滑轮结构42通过第二转接头72与第二支撑碳管92固定连接,且所述第二支撑碳管92与所述中心接头11的第二边固定连接;所述第三滑轮结构43通过第三转接头73与第三支撑碳管93固定连接,且所述第三支撑碳管93与所述中心接头11的第三边固定连接。
64.其中,所述第一支撑碳管91通过第一卡箍81固定于所述主体安装板10上;所述第二支撑碳管92通过第二卡箍82固定于所述主体安装板10上;所述第三支撑碳管93通过第三卡箍83固定于所述主体安装板10上。可选的,所述第一卡箍81、所述第二卡箍82以及所述第三卡箍83均为金属卡箍。
65.该实施例中,所述中心接头11的形状设计为六边形;对应的,所述支撑碳管与所述中心接头11的一边固定连接;所述第一支撑碳管91、所述第二支撑碳管92、所述第三支撑碳管93以及所述中心接头11四者之间的固定连接构成一个y字型结构。以上各部件之间的连接固定方式,在推动器推动无人机时保证了整体推动器结构的稳定性。
66.本实用新型的一可选实施例中,对滑轮结构进行说明。所述第一滑轮结构41、所述第二滑轮结构42、所述第三滑轮结构43均包括:滑轮、滑轮限位环和轮叉;所述滑轮通过所述滑轮限位环固定在所述轮叉的叉头内部;所述轮叉另一端与转接头固定连接;
67.如图3所述,具体的:第一滑轮411贯穿并置于第一滑轮限位环412上,第一滑轮限位环412的两端与第一轮叉413的u型结构头部两端固定连接,使第一滑轮411固定在第一轮叉413的插头内部,即组成第一滑轮结构41;同样的,第二滑轮421贯穿并置于第二滑轮限位环422上,第二滑轮限位环422的两端与第二轮叉423的u型头部两端固定连接,使第二滑轮421固定在第二轮叉423的插头内部,即组成第二滑轮结构42;第三滑轮431贯穿并置于第三滑轮限位环432上,第三滑轮限位环432的两端与第三轮叉433的u型头部两端固定连接,使第三滑轮431固定在第三轮叉433的插头内部,即组成第三滑轮结构43。所述第一滑轮结构
41通过第一转接头71与所述第一支撑碳管91固定连接;所述第二滑轮结构42通过第二转接头72与所述第二支撑碳管92固定连接;所述第三滑轮结构43通过第三转接头73与所述第三支撑碳管93固定连接。
68.本实用新型的一可选实施例中,所述中心接头11上还设置有两个伞绳穿过孔12,如图3所示,结合以上实施例可知,所述推动器4主要通过滑轮结构与主体舱体2的滑轨进行滑动连接,当所述推动器4工作时,此种连接方式可以保证所述推动器4快速的推出无人机;在中心接头11上同时设置两个伞绳穿过孔12,且二者关于中心接头11对称设置,当所述推动器4通过滑轮结构与舱体滑动连接时,伞绳穿过中心接头11上的伞绳穿过孔12,并且与降落伞固定连接,在所述推动器4推动无人机或者不工作时,可以保证所述推动器4在舱体内部的稳定;同时当所述推动器4工作时,也直接配合降落伞进行推动无人机。
69.本实用新型的一可选实施例中,所述尾部减速结构包括:可分离的多级舱体;固定于所述可分离的多级舱体上的分离翼装置。
70.该实施例中,所述多级舱体之间插接固定;分离翼装置与多级舱体插接固定;在所述多级舱体分离时,所述分离翼装置同时也随之分离。通过插接的方式连接,便于所述多级舱体与分离翼装置快速的分离。
71.如图5所示,所述可分离的多级舱体包括:第一舱体13以及与所述第一舱体13插接的第二舱体14;所述分离翼装置包括第一翼台51;与所述第一翼台51插接的第二翼台52;与所述第二翼台52插接的第三翼台53;与所述第一翼台51以及所述第二翼台52插接的第一翼面61;与所述第三翼台53插接的第二翼面62;所述第一翼面61与所述第二翼面62插接。
72.该实施例中,所述第一舱体13与所述第二舱体14的插接是在水平横向上插接;所述第一翼台51、所述第二翼台52、所述第三翼台53依次插接,且也是在水平横向上插接,可选的,所述翼台上均设计有减重孔,从而减轻整个分离翼装置的重量。同时,所述第一翼台51与主体舱体2插接,所述第二翼台52与所述第一舱体13插接,所述第三翼台53与所述第二舱体14插接,其中,所述翼台与所述舱体之间的插接为水平纵向上的插接。所述第一翼面61与所述第二翼面62的插接为水平横向上的插接;所述第一翼面61同时与所述第一翼台51以及所述第二翼台52插接。当然,所述第一翼台51和所述第二翼台52也可以分别对应插接一个翼面;所述第二翼面62与所述第三翼台53插接;所述翼台与所述翼面之间的插接为水平纵向上的插接。其中,所述第一翼面61边缘,即与所述第一翼台51插接的边缘设计为流线型结构,在实际舱体分离减速应用中以减小阻力。
73.本实用新型的一可选实施例中,所述分离翼装置为4个,均匀插接分布于所述可分离的多级舱体的四周,在多级舱体分离时,用于稳定飞行器飞行状态,确保飞行姿势,防止飞行器自身旋转。
74.所述第二舱体14的一端还插接有尾盖7,所述第二翼面62、所述第三翼台53与所述尾盖7对应的位置处有豁口结构15;在具体应用中,所述豁口结构15便于所述尾盖7与所述第二舱体14的分离。
75.所述主体舱体2的外部中段设置的加厚区26,当所述主体舱体2的外部挂机与所述主体舱体2脱离时,会产生一定的冲击力及反向作用力,所述的加厚区26对所述主体舱体2起到保护作用。
76.上述实施例所述的用于投放无人机的多级分离系统,可选的,还包括头罩1,且所
述头罩1的上下头罩与所述主体舱体2的头部通过合页固定连接,在多级分离系统中,随着多级舱体之间依次减速分离,所述头罩1的上下头罩分别绕各自合页转轴完全分开;可选的,还包括与所述主体舱体2内部无人子机3固定连接的降落伞自动分离装置,通过分离装置中舵机旋转运动实现弹簧销收缩运动,从而实现挂伞组件与所述无人子机3的分离
77.本实用新型的用于投放无人机的多级分离系统,在具体实施应用中包括:第一次减速分离,释放一级减速伞;第二次减速分离,释放二级减速伞;第三次减速分离,释放三级减速伞。减速伞被释放后,减速伞连接伞绳向所述主体舱体2尾部方向运动,同时所述推动器4在伞绳运动的反向作用力下,向所述主体舱体2头部推送无人机。
78.如图6所示:当所述尾盖7与所述第二舱体14解锁分离时,此时为第一次减速,释放一级减速伞;
79.当所述第二舱体14与所述第一舱体13分离时,此时为第二次减速,释放二级减速伞;与此同时:所述第二翼面62与所述第一翼面61分离;所述第三翼台53与所述第二翼面62分离;所述第三翼台53与所述第二舱体14分离;
80.当所述第一舱体13与所述主体舱体2分离时,此时为第三次减速,释放三级减速伞;与此同时:所述第一翼面61与所述第一翼台51、所述第二翼台52分离;所述第一翼台51与所述第二翼台52分离;所述第一翼台51与所述主体舱体2分离;所述第二翼台52与所述第一舱体13分离。
81.在所述翼台、所述翼面相互插接组成的分离翼装置中,即,所述第二翼面62与所述第三翼台53插接的位置尾部设计有豁口15结构,以便于所述第二舱体14与所述尾盖7分离;所述翼面、所述翼台、所述可分离的多级舱体均以插接方式固定,能够使三者能够快速分离。
82.以上所述是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。