1.本发明涉及磁悬浮控制力矩陀螺锁紧装置,特别是一种基于磁致伸缩形状记忆结构的磁悬浮控制力矩陀螺锁紧装置。
背景技术:
2.惯性执行机构主要包括动量轮、反作用飞轮、控制力矩陀螺等,是一类广泛应用于各类在轨航天器的姿态控制装置。这类装置依靠电力即可驱动,不需要消耗燃料,且可以输出相当精确的控制力矩,尤其适合作为大质量、长寿命航天器的主要姿态控制设备。上述三类装置均以一个绕定轴旋转的转子为主体,通过改变该转子的角动量大小或方向实现控制力矩的输出。增加转子转速可以让转子具有更大的角动量,提高输出力矩的范围,但对于采用机械轴承的惯性执行机构而言,提高转速意味着更大的摩擦产热与振动,对装置的输出精度与可靠性具有不利影响。对于飞轮等工作在低转速下的惯性执行机构,机械轴承的静摩擦力矩还将严重影响装置的控制精度。
3.磁悬浮轴承利用电磁力将转子组件整体悬浮起来,完全消除了转子与框架间的接触,由此一举解决了装置的摩擦及振动问题,可以大大提高装置的输出精度与范围。航天器在发射阶段面临着较为剧烈的振动,采用磁轴承完全悬浮的转子在这一阶段受振动影响很大,对于质量大于2kg的转子,必须设计适当的锁紧装置将其固定,避免其受过载冲击其他部件造成变形甚至失效。当航天器完成入轨后,锁紧装置需要能够解除对转子的锁定,恢复装置的正常功能,并在需要时再次锁紧。
4.可重复锁紧机构的基本思路是利用外力驱动机械结构与转子形成刚性接触,主要难点在于选择合适的驱动方式,尽量降低装置的重量与体积。目前常用的驱动方式主要有电机和电磁两种。采用电机驱动需要传动零件,且成品电机的尺寸固定,无法随设计需求线性变化,因此对于转子尺寸低于10kg的惯性执行机构而言,采用电磁力驱动更为理想。该种驱动方案不能像电机驱动一样,利用传动零件保证装置的自锁,而需要专门设计自锁结构。过去存在利用形状记忆合金的方案,通过升温造成其形变以实现自锁。这种方式需要相对较大的温度变化,完成升温需要一定时间,使得锁紧与解锁动作较慢,且在散热条件不佳时可能造成其他不利影响。磁致伸缩材料具有响应速度快、输出力大、形变精度高等优势,利用磁致伸缩材料制作的形状记忆结构作为装置的作动件是一条可行的思路。
5.为保证装置的正常工作,转子质量大于2kg的各类磁悬浮惯性执行机构均需要适当的锁紧机构进行保护,使其免于被发射阶段的高过载损坏。对于质量大于10kg的转子,采用电机驱动机械结构咬合转子是一条可行的思路,但对于质量小于10kg的转子,由于电机和传动件的体积、质量难以缩小,造成结构死重过大而不适用;采用热敏形状记忆合金作为驱动则存在响应时间长、升温幅度高等问题。这造成目前中小型磁悬浮惯性执行机构,尤其是2-4kg量级的装置,当前尚无合适的锁紧方案。
技术实现要素:
6.本发明的技术解决问题是:克服采用电机驱动对电机及传动件的硬性需求,导致难以小型化的问题,以及采用热敏形状记忆合金作为驱动存在的响应时间长、升温幅度高等问题,提供一种基于磁致伸缩形状记忆结构的磁悬浮惯性执行机构锁紧装置,其结构紧凑,质量轻,工作响应时间短,仅需一次短时间通电即可完成锁紧/解锁动作,能耗很低,且不会对惯性执行机构的正常工作造成额外影响。
7.发明的技术解决方案是:设计一型形状简单、体积与质量较小的锁紧装置,避免使用电机和传动零件。利用电磁铁产生的磁力驱动装置,并利用磁致伸缩材料制成磁敏形状记忆结构,用以在作动完成后保持装置锁紧与解锁状态。
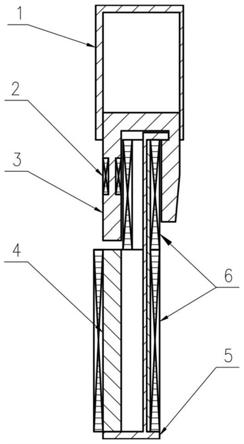
8.本发明的一种基于磁致伸缩形状记忆结构的磁悬浮惯性执行机构锁紧装置包括:磁致伸缩形状记忆弹片(5)、主励磁线圈(6)、副励磁线圈(2)、锁紧滑块(3)、导向架(1)及铁芯(4);磁致伸缩形状记忆弹片(5)一端固定于惯性执行机构壳体上,另一端不受任何约束;磁致伸缩形状记忆弹片(5)外围绕有主励磁线圈(6),用于为磁致伸缩形状记忆弹片(5)提供变形所需的磁场;所述导向架(1)固定于惯性执行机构壳体上,剖面呈u型,锁紧滑块(3)嵌入其中,使得锁紧滑块(3)仅具有平行于转子旋转轴的一个平动自由度;锁紧滑块(3)剖面也呈u型,槽宽大于主励磁线圈(6)上半部分的外径,使得磁致伸缩形状记忆弹片(5)和主励磁线圈(6)的上半部分能够伸入其中,同时在靠近转子一侧开有槽;
9.执行锁紧动作时,主励磁线圈(6)通电将铁芯(4)磁化,并使得磁致伸缩形状记忆弹片(5)发生形变,解除磁致伸缩形状记忆弹片(5)对锁紧滑块(3)的固定,同时锁紧滑块(3)上的副励磁线圈(2)通电,电磁力使得锁紧滑块(3)向下移动锁紧转子,之后主励磁线圈(6)断电,磁致伸缩形状记忆弹片(5)复位,将锁紧滑块(3)固定于锁紧位置;
10.执行解锁动作时,主励磁线圈(6)反向通电,磁致伸缩形状记忆弹片(5)再次形变解除对锁紧滑块(3)的固定,同时副励磁线圈(2)通电,电磁力使得锁紧滑块(3)向上运动,至转子完全解锁后,主励磁线圈(6)断电,磁致伸缩形状记忆弹片(5)复位,将锁紧滑块(3)固定于解锁位置;上述锁紧和解锁流程重复进行。
11.本发明是首次将磁致伸缩形状记忆结构应用于磁悬浮惯性执行机构的锁紧装置上,适用于转子质量在2kg以上,10kg以下的磁悬浮惯性执行机构,其结构紧凑,质量轻,工作响应时间短,仅需一次短时间通电即可完成锁紧和解锁动作,能耗很低,且不会对惯性执行机构的正常工作造成额外影响。
12.所述磁致伸缩形状记忆弹片(5)双金属片构成,即由一片巨磁致伸缩材料terfenol-d合金片及一片抗磁金属材料(如铝合金或黄铜)贴合而成,两金属片的结合面利用胶合固定,不会发生相对滑动,形成形状记忆双金属片结构;双金属片的一端固定于惯性执行机构壳体上,另一端处于自由状态,形成悬臂梁结构;在外加磁场的情况下,巨磁致伸缩材料terfenol-d合金片发生伸长,受到一侧贴合的抗磁材料片阻碍,沿轴向的伸长被转化为垂直轴向的屈曲,使得双金属弹片的末端产生一定挠度;对于材料及尺寸参数确定的弹片,该挠度仅与外加磁场强度有关,通过改变磁场强度即获得需要的挠度;当外加磁场强度为0时,巨磁致伸缩材料terfenol-d合金片不再具有形变,双金属片会复原为原本的平直状态,即该双金属片具有形状记忆功能;形状记忆弹片(5)自由端有一凸起结构,伸入锁紧滑块(3)的开槽中,当形状记忆弹片(5)本身处于无形变状态时,该凸起会阻挡锁紧滑块(3)
的运动,与转子轮缘或导向架(1)上顶板一起,将锁紧滑块(3)完全锁死,避免锁紧滑块(3)发生不受控的运动导致锁紧装置失效。
13.所述主励磁线圈(6)的长度与磁致伸缩形状记忆弹片(5)一致,且能够通过正反两个方向的电流,用以与锁紧滑块(3)上的副励磁线圈(2)产生吸力或斥力,进而控制锁紧滑块(3)的运动;锁紧滑块(3)靠外一侧为标准圆柱面,与导向架(1)接触,靠内一侧为母线倾角5
°
的圆锥面,该倾角小于锁紧滑块(3)与导向架(1)接触面的滑动摩擦角,当锁紧滑块(3)锁紧转子时,该圆锥面与转子轮缘接触。转子沿径向对锁紧滑块(3)产生作用力时,由于锁紧滑块(3)受力方向与接触面法线的夹角小于摩擦角,锁紧滑块(3)在转子轴向上受到的推力分量总小于摩擦力,产生自锁效应,阻止锁紧滑块(3)的运动。
14.所述锁紧滑块(3)采用铁磁材料制成,中部绕有副励磁线圈(2);当线圈中通过电流时,锁紧滑块(3)相当于一电磁铁,与下方被主励磁线圈(6)充磁的铁芯(4)相互作用,为锁紧滑块(3)提供靠近或远离转子轮缘的驱动力。所述导向架(1)由抗磁材料制成,在与锁紧滑块(3)接触位置有两条铜丝分别与锁紧滑块(3)上副励磁线圈(2)的引入、引出线接触,用于为副励磁线圈(2)供电。
15.本发明的原理是:形状记忆弹片(5)采用一个terfenol-d合金薄片作为主动片,其特点是在磁场中长度会增大,另外用一片抗磁材料金属片作为被动片,利用树脂胶贴合于主动片的一侧,两金属片一端固定在惯性执行机构壳体上,另一端完全自由,不受任何约束,形成双金属片悬臂梁结构。当双金属片被置于一定磁场中时,主动片的伸长受到被动片的阻碍作用,被转变为弯曲,使得双金属片自由端在垂直其轴线的方向上产生一定挠度,驱动相应机械结构解除对锁紧滑块(3)的锁定。当磁场消失后,双金属片形变消失,锁紧滑块(3)再次被锁定。该磁场是通过绕制在磁致伸缩形状记忆弹片(5)外围的主励磁线圈(6)通电实现的。部分线圈内包络有铁磁材料,即铁芯(4),用以增强对锁紧滑块(3)的驱动力。锁紧功能主要依靠锁紧滑块(3)实现,其外侧为圆柱面,与导向架(1)内壁接触,可以紧贴导向架(1)沿转子轴向运动;内侧为母线倾角5
°
的圆锥面的一部分,在与转子接触并受到径向载荷时,滑块受到的推力轴向分量始终小于滑动摩擦力,即发生自锁效应,该效应保证锁紧滑块(3)不会运动。锁紧滑块(3)本身由铁磁材料制成,其上绕有一组副励磁线圈(2),通电时锁紧滑块(3)本身成为一电磁铁,与下方主励磁线圈(6)和铁芯(4)相互作用,在导向架(1)的引导下向特定方向移动,控制锁紧滑块(3)靠近或远离转子,从而实现对其的锁紧与解锁。
16.本发明与现有技术相比优点在于:
17.(1)本发明通过磁致伸缩材料制成形状记忆弹片作为装置的限位与承力结构,并结合具备自锁结构的锁紧滑块,实现对磁悬浮惯性执行机构转子的可重复锁紧与解锁,适用转子质量在2kg以上的中小型磁悬浮控制力矩陀螺、飞轮等装置。其结构紧凑,质量轻,工作响应时间短,仅需一次短时间通电即可完成锁紧/解锁动作,能耗很低,且不会对惯性执行机构的正常工作造成额外影响。
18.(2)本发明采用的电磁驱动机械结构锁紧的方案,与电机驱动的方案相比,无需电机与传动件,整体结构更加简单,且由于电磁驱动所需部件为非标件,其尺寸便于随设计要求进行变动,对于更小的转子,可以通过将相应尺寸线性减小来实现适配,设计与应用均更加便利。与采用热敏形状记忆合金的方案相比,由于装置采用自锁结构,且磁致伸缩材料响
应速度快,形变量精确,以其制成的双金属片可以快速输出精确形变,故仅需一次短时间通电即可完成锁紧/解锁动作,其余时间装置处于完全无功耗的状态,工作过程不会造成温度剧烈变化,因此能耗更小,可靠性更高。
附图说明
19.图1为本发明锁紧机构整体示意图;
20.图2为锁紧机构作动零件机械示意图,其中(a)为形状记忆双金属弹片剖面示意图,(b)为锁紧滑块剖面示意图;
21.图3为将数套机构实际应用于磁悬浮惯性执行机构时的布置示意图。
具体实施方式
22.下面结合附图及实施例对本发明进行详细说明。
23.如图2所示,形状记忆弹片5由一片巨磁致伸缩材料(terfenol-d)合金薄片作为主动片i,另外用一抗磁材料金属片作为被动片ii,利用树脂胶贴合于主动片的一侧,被动片上设置有凸台、通孔等结构,用于将双金属片,及磁致伸缩形状记忆弹片5的一端固定于执行机构基座上,另一端悬空形成悬臂梁结构,悬空端有一凸起,用于与锁紧滑块3内部的开槽配合。当上述双金属片被置于磁场中时,主动片将沿轴向伸长,同时又受到被动片的阻碍作用,形变被转变为弯曲,使得金属片自由端在垂直其轴线的方向上产生一定挠度,该挠度将在外加磁场消失后自行消除。
24.锁紧滑块3剖面呈u型,其一侧稍长并在中段开槽,其中容纳一组副励磁线圈2;稍短的一侧有一浅槽,用于与磁致伸缩形状记忆弹片5末端的凸起配合,另一侧向内倒角,倾角为5
°
,在锁紧状态下此部分将与转子外缘接触。锁紧滑块3外侧面与导向架1接触,可沿轴向在导向架1上滑动,且摩擦角大于5
°
,故当锁紧滑块3受到转子沿径向作用的力时将发生自锁,即无论作用力多大,锁紧滑块3受到的轴向推力分量始终小于从导向架1上产生的滑动摩擦力,故锁紧滑块3始终不会发生移动。
25.如图1所示,整套锁紧机构的核心为前述的形状记忆弹片5和锁紧滑块3,通过主励磁线圈6产生磁场,使得磁致伸缩材料terfenol-d制成的主动片伸长,受到未发生形变的被动片牵拉,双金属片悬臂梁将向被动片一侧弯曲,其最终的稳定状态为一段圆弧。由于形状记忆弹片5一端固定,其自由端在垂直轴向的方向上将有一定挠度。此时,被动片末端的凸起将从锁紧滑块3的开槽中拔出,解除其在转子轴向上的锁定。由于磁致伸缩材料本身响应速度快的特性,上述变形过程将在极短时间内完成。
26.在形变动作发生后,绕在锁紧滑块3上的副励磁线圈2通电,使锁紧滑块3磁化。由于主励磁线圈6仍在通电,固定在基座上的铁芯4同样处于磁化状态,两者间的电磁力将驱动锁紧滑块3靠近或远离转子。执行锁紧动作时,主励磁线圈6正向通电,锁紧滑块3受到吸引向下运动,直至其楔入转子与壳体之间,内侧面倒角位置与转子外缘接触,完成对转子的锁定;执行解锁动作时,主励磁线圈6反向通电,锁紧滑块3受到排斥向上运动,直至与导向架1顶板接触,此时其与转子将不再接触,转子处于自由状态。
27.当锁紧滑块3完成运动,到达预定位置后,主励磁线圈6首先断电,磁致伸缩片迅速恢复原来的长度,使得形状记忆弹片5重新变为平直状态,末端挠度消失,被动片上的凸起
重新嵌入锁紧滑块3的下端或开槽内,将其沿轴向的自由度锁定。此时副励磁线圈2仍处于导通状态,锁紧滑块3将受到仍被轻微磁化的铁芯4或导向架1的上顶板的吸引,不会发生运动。直至形状记忆弹片5完成复位,锁紧滑块3被完全锁定后,副励磁线圈2断电。至此装置完全断电,整个锁紧/解锁动作完成。
28.用于实现形变的记忆合金弹片5与用于吸引、排斥锁紧滑块3的铁芯4均需要利用主励磁线圈6产生磁场,但其长度相差很大,且铁芯4上方必须为锁紧滑块3预留运行空间,故主励磁线圈6分为两个部分:下半部分内径较大,将记忆合金弹片5的下半部分和铁芯4包络其中;上半部分内径较小,仅用于包络形状记忆弹片5的上半部分。
29.如图3所示,为实现转子锁紧,需要从多个方向上锁紧转子外缘,故在实际使用中,将上述装置围绕转子均匀布置,安装个数由惯性执行机构本身的型号、转子的尺寸、形状及其他设计要求确定。导向架1和形状记忆弹片5固定于装置外壳上,有必要时还可以与装置外壳本身融合为一个零件,以达到简化结构、减轻重量的目的。
30.本发明的锁紧装置的工作无需任何外部辅助,对线圈进行通电即可完成全部锁紧或解锁动作,且部分尺寸具有较大的变动空间,只需稍作改动即可满足不同的设计要求,具有较好的泛用性。在实际应用中,应用者可以根据需求修改弹片长度、线圈参数、滑块导向架形状等变量,使其满足工程需要。