1.本发明涉及无人机,属于无人机技术领域。
背景技术:
2.无人机,它是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。现如今,由于无人机的出现,城乡生活也发生了相应地改变。在乡村,无人机可提升偏远地区的运输能力以及农业生产效率。在许多偏远山区,糟糕的道路使农民们在一年中的某些时候与外界完全隔绝,阻断了他们与外界的联系。而无人机可以为偏远及交通欠发达的乡村地区提供一个快速穿越糟糕道路、运输轻小型物资的途径。在农业生产方式上,利用无人机技术的深入和使用,为农业提供一种现代化的高效率、低成本的植保方式,帮助农民渐进的改进农业作业方式,使现有的农田耕作变得更高效、更节约资源和环境友好。
3.而在城市中,无人机更是作为一种新的交通工具,让城市生活更便利。利用无人机来运输轻小、紧急的物件,有效地解决了交通堵塞问题。此外,无人机还可以为城市规划、建设和管理提供多方面的基础地理信息以及执法取证,诸如城市道路桥梁建设、交通巡逻、治安监控、城市执法等等。无人机从助力现代乡村到给力智慧城市,都有一席之地。
4.随之而来的,国内无人机市场已得到了较大发展,从最初的军用领域逐渐扩展到消费领域。国内消费无人机市场火热,普通民众对无人机的认可程度和需求度逐渐攀升。虽然无人机发展迅速,但是现有的无人机还不能实现对目标物件的自动抓取和自动投放,需要通过人工将目标物件绑在无人机上,待无人机到达目的地时,再次通过人工抓停无人机后,取下目标物件。这种操作方式,不仅耗时耗力,而且存在一定的危险性,具有改进的空间。
技术实现要素:
5.本发明的目的是提供无人机。
6.本发明要解决的问题是现有的无人机不能自动投放物件和自动抓取物件的缺陷。
7.为实现本发明的目的,本发明采用的技术方案是:无人机,包括机体、螺旋桨装置、传感器集成、三轴陀螺仪、连接盘、微控制器、转盘装置、摄像头装置、自动抓取器、抓杆、自动伸缩装置、滑轮、gps定位器,所述机体的四角上设有螺旋桨装置,每个螺旋桨装置上设有传感器集成,机体的中心设有三轴陀螺仪,三轴陀螺仪底部设有连接盘,连接盘内设有微控制器,连接盘的底部设有转盘装置,转盘装置的底部设有摄像头装置,摄像头装置底部设有自动抓取器,机体底部左右两侧设有抓杆,每个抓杆底部前后各设有自动伸缩装置,自动伸缩装置底部安装有滑轮,机体上安装有gps定位器。
8.进一步的,所述转盘装置内设有支撑盘,支撑盘内设有转盘电机,转盘电机轴端连接齿轮,齿轮安装在转盘内。
9.进一步的,所述自动抓取器顶部设有自动伸缩杆,自动伸缩杆上安装有支撑块,支
撑块左右两侧连接安装有转轴,每个转轴上安装有连接轴,连接轴的另一端连接安装在自动伸缩杆的底端,转轴底部设有固定块。
10.进一步的,所述传感器集成上安装有速度传感器和防碰撞传感器。
11.进一步的,所述螺旋桨装置上安装有水平旋转驱动器和垂直驱动器。
12.本发明的优点是:本无人机能够实现自动投放或自动抓取功能,结合转盘装置,可以从不同方向抓取物件;在飞行时,利用三轴陀螺仪随时保持机体平衡,同时通过gps定位器和摄像头装置对无人机进行实时定位追踪记录;利用伸缩装置和滑轮,辅助无人机安全着陆,实现无人机的陆地滑行。
附图说明
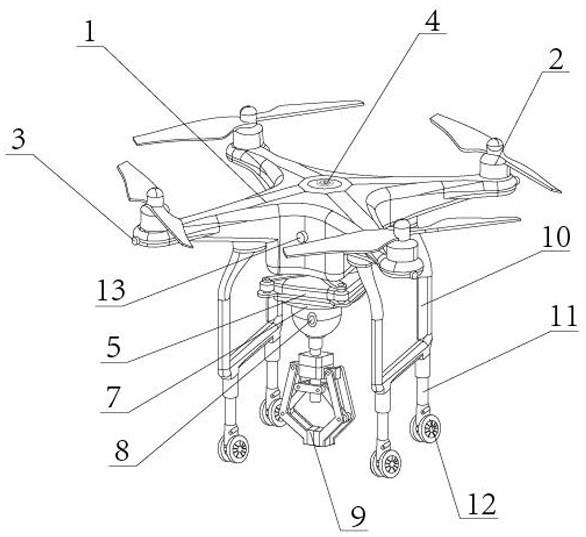
13.图1是无人机的整体结构示意图;图2是无人机的三轴陀螺仪的结构示意图;图3是无人机的局部放大结构示意图;图4是无人机的转盘的结构示意图;图5是无人机的自动抓取器的结构示意图;图中:1、机体2、螺旋桨装置3、传感器集成4、三轴陀螺仪5、连接盘6、微控制器7、转盘装置71、支撑盘72、转盘电机73、齿轮74、转盘8、摄像头装置9、自动抓取器91、自动伸缩杆92、支撑块93、转轴94、连接轴95、固定块10、抓杆11、自动伸缩装置12、滑轮13、gps定位器。
具体实施方式
14.下面结合附图及实施例对本发明作进一步的说明。
15.无人机,包括机体1、螺旋桨装置2、传感器集成3、三轴陀螺仪4、连接盘5、微控制器6、转盘装置7、摄像头装置8、自动抓取器9、抓杆10、自动伸缩装置11、滑轮12、gps定位器13,所述机体1的四角上设有螺旋桨装置2,用于提供飞行,每个螺旋桨装置2上设有传感器集成3,用于采集数据,机体1的中心设有三轴陀螺仪4,用于保持平衡,三轴陀螺仪4底部设有连接盘5,用于提供连接,连接盘5内设有微控制器6,用于处理数据,连接盘5的底部设有转盘装置7,用于提供转动,转盘装置7的底部设有摄像头装置8,用于拍摄画面,摄像头装置8底部设有自动抓取器9,用于抓取物件,机体1底部左右两侧设有抓杆10,用于抓握,每个抓杆10底部前后各设有自动伸缩装置11,用于自动伸缩,自动伸缩装置11底部安装有滑轮12,用于滑行,机体1上安装有gps定位器13,用于定位。
16.进一步的,所述转盘装置7内设有支撑盘71,支撑盘71内设有转盘电机72,转盘电机72轴端连接齿轮73,齿轮73安装在转盘74内。
17.进一步的,所述自动抓取器9顶部设有自动伸缩杆91,自动伸缩杆91上安装有支撑块92,支撑块92左右两侧连接安装有转轴93,每个转轴93上安装有连接轴94,连接轴94的另一端连接安装在自动伸缩杆91的底端,转轴93底部设有固定块95。
18.进一步的,所述传感器集成3上安装有速度线传感器和防碰撞传感器。
19.进一步的,所述螺旋桨装置2上安装有水平旋转驱动器和垂直驱动器。
20.使用方法:启动机器,螺旋桨装置2上的垂直驱动器启动,带动机体1向上,通过摄
像头装置8锁定目标位置,并通过gps定位器13定位机体1的位置,螺旋桨装置2上的水平旋转驱动器启动将机体1运送至目标位置,自动抓取器9上的自动伸缩杆91向下延伸带动转轴93和连接轴94转动,使固定块95打开抓取目标物体后,自动伸缩杆91向上伸缩,牢牢地将目标物体抓住;通过遥控,机体1将目标物体运送至目的地,在飞行途中,gps定位器13和摄像头装置8对机体1进行定位追踪记录,传感器集成3上的速度传感器用于测量机体1的速度,传感器集成3上的防碰撞传感器用于防止机体1碰撞,三轴陀螺仪4实时调节机体1的平衡;当机体1飞行至目标位置时,自动伸缩装置11向下延伸,使滑轮12着陆,螺旋桨装置2停止转动,滑轮12可滑行至目标位置,自动抓取器9上的自动伸缩杆91向下延伸,固定块95平稳地将目标物件放置在目标位置,之后,机体1原路返回;在飞行过程中,当机体1遇到无法飞跃的障碍物时,可通过滑轮12滑行前进。
技术特征:
1.无人机,包括机体(1)、螺旋桨装置(2)、传感器集成(3)、三轴陀螺仪(4)、连接盘(5)、微控制器(6)、转盘装置(7)、摄像头装置(8)、自动抓取器(9)、抓杆(10)、自动伸缩装置(11)、滑轮(12)、gps定位器(13),其特征是:所述机体(1)的四角上设有螺旋桨装置(2),每个螺旋桨装置(2)上设有传感器集成(3),机体(1)的中心设有三轴陀螺仪(4),三轴陀螺仪(4)底部设有连接盘(5),连接盘(5)内设有微控制器(6),连接盘(5)的底部设有转盘装置(7),转盘装置(7)的底部设有摄像头装置(8),摄像头装置(8)底部设有自动抓取器(9),机体(1)底部左右两侧设有抓杆(10),每个抓杆(10)底部前后各设有自动伸缩装置(11),自动伸缩装置(11)底部安装有滑轮(12),所述机体(1)上安装有gps定位器(13)。2.根据权利要求1所述的无人机,其特征是:所述转盘装置(7)内设有支撑盘(71),支撑盘(71)内设有转盘电机(72),转盘电机(72)轴端连接齿轮(73),齿轮(73)安装在转盘(74)内。3.根据权利要求1所述的无人机,其特征是:所述自动抓取器(9)顶部设有自动伸缩杆(91),自动伸缩杆(91)上安装有支撑块(92),支撑块(92)左右两侧连接安装有转轴(93),每个转轴(93)上安装有连接轴(94),连接轴(94)的另一端连接安装在自动伸缩杆(91)的底端,转轴(93)底部设有固定块(95)。4.根据权利要求1所述的无人机,其特征是:所述传感器集成(3)上安装有速度传感器和防碰撞传感器。5.根据权利要求1所述的无人机,其特征是:所述螺旋桨装置(2)上安装有水平旋转驱动器和垂直驱动器。
技术总结
无人机,属于无人机技术领域,包括机体、螺旋桨装置、传感器集成、三轴陀螺仪、连接盘、微控制器、转盘装置、摄像头装置、自动抓取器、抓杆、自动伸缩装置、滑轮、GPS定位器,所述机体的四角上设有螺旋桨装置,每个螺旋桨装置上设有传感器集成,机体的中心设有三轴陀螺仪,三轴陀螺仪底部设有连接盘,连接盘内设有微控制器,连接盘的底部设有转盘装置,转盘装置的底部设有摄像头装置,摄像头装置底部设有自动抓取器,机体底部左右两侧设有抓杆,每个抓杆底部前后各设有自动伸缩装置,自动伸缩装置底部安装有滑轮,所述机体上安装有GPS定位器。本无人机能够实现自动投放或自动抓取功能。人机能够实现自动投放或自动抓取功能。人机能够实现自动投放或自动抓取功能。
技术研发人员:方懂平
受保护的技术使用者:舟山巨洋技术开发有限公司
技术研发日:2021.11.17
技术公布日:2022/1/6