1.本实用新型涉及多旋翼飞行器机架结构领域,具体是一种多旋翼飞行器机身结构。
背景技术:
2.通常会使用无线电干扰、诱导、压制手段对违法飞行器进行压制,但是在使用无线电全频段压制时,会使我方的工作用无线电频段也无法使用;在采用低空雷达和光电设备发现手段进行压制时,非常考验低空雷达和光电设备的监控范围;在采用破坏性武器手段时,很难准确确保击毁小型低空或者高空突防的无人飞行器,且附带的损害效果无法评估。而且通常因为散热环境不好从而导致总控模块工作不稳定。
技术实现要素:
3.本实用新型的目的在于提供一种多旋翼飞行器机身结构,以解决上述背景技术中提出的问题。
4.为实现上述目的,本实用新型提供如下技术方案:
5.一种多旋翼飞行器机身结构,包括机身本体,所述机身本体上设有总控模块;所述机身本体的前部设有三角支撑板,所述三角支撑板的三角突起部朝飞行方向设置且三角支撑板顶部设有设备安装组件,三角支撑板的后部为与三角突起部形成具有仰角的侧壁,所述侧壁上开设有侧面通孔;所述总控模块的两侧均向机身本体外间隔延伸有两个竖向支撑件,所述竖向支撑件与机身本体的顶部具有间隔,所述三角支撑板、设备安装组件和竖向支撑件均与机身本体一体化设置。
6.作为本实用新型进一步的方案:所述三角支撑板与机身本体的长度比例为1/4.5
‑
1/3,三角支撑板的三角突起部的角度为5
°‑8°
,三角支撑板的厚度为2mm
‑
5mm,楔形角度为25
°‑
43
°
。
7.作为本实用新型进一步的方案:所述设备安装组件包括物理打击装置固定座,所述物理打击装置固定座安装在三角支撑板三角突起部的上方,且三角支撑板与物理打击装置固定座的连接处设有用于安装打击装置的安装孔。
8.作为本实用新型进一步的方案:所述设备安装组件还包括摄像头固定座,所述摄像头固定座位于三角支撑板的两个侧壁之间且高度高于物理打击装置固定座高度。
9.作为本实用新型再进一步的方案:所述设备安装组件还包括激光发射器固定座,所述安装在三角支撑板侧壁的顶部,所述激光发射器固定座安装高度高于摄像头固定座。
10.与现有技术相比,本实用新型的有益效果是:
11.通过设置三角支撑板能够当作另一种冲撞的打击手段的同时可以更好的切割空气,诱导空气向两侧集中,从而加快总控模块的散热。解决了传统对违法飞行器进行压制的多旋翼飞行器攻击条件不够且散热不好的问题。
附图说明
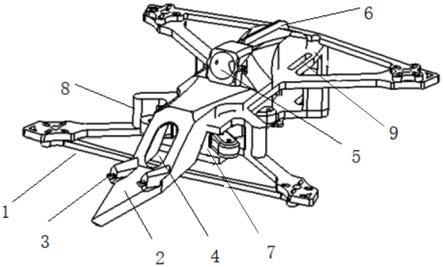
12.图1为本实用新型的结构示意图。
13.附图标记注释:机身本体1、三角支撑板2、物理打击装置固定座3、摄像头固定座4、激光发射器固定座5、机身本体尾部6、侧面通孔7、竖向支撑件8、通孔9。
具体实施方式
14.以下实施例会结合附图对本实用新型进行详述,在附图或说明中,相似或相同的部分使用相同的标号,并且在实际应用中,各部件的形状、厚度或高度可扩大或缩小。本实用新型所列举的各实施例仅用以说明本实用新型,并非用以限制本实用新型的范围。对本实用新型所作的任何显而易知的修饰或变更都不脱离本实用新型的精神与范围。
15.请参阅图1,在本实用新型的一种实施例中,一种多旋翼飞行器机身结构,包括机身本体1,所述机身本体1上设有总控模块;所述机身本体1的尾部设有机身本体尾部6,机身本体尾部6的两侧开设有通孔9,所述机身本体1的前部设有三角支撑板2,所述三角支撑板2的三角突起部朝飞行方向设置且三角支撑板2顶部设有设备安装组件,三角支撑板2的后部为与三角突起部形成仰角在30
°‑
37
°
的侧壁,所述侧壁上开设有侧面通孔7;所述总控模块的两侧均向机身本体1外间隔延伸有两个直径为2mm
‑
4mm的竖向支撑件8,所述竖向支撑件8与机身本体1顶部的间隔为2.5mm
‑
3.75mm,所述三角支撑板2、设备安装组件和竖向支撑件8均与机身本体1一体化设置,且整体多处采用圆角化设计,适用于轴距236mm
‑
380mm的机架。
16.作为优选的,所述三角支撑板2与机身本体1的长度比例为1/4.5
‑
1/3,三角支撑板2的三角突起部的角度为5
°‑8°
,三角支撑板2的厚度为2mm
‑
5mm,楔形角度为25
°‑
43
°
。
17.作为优选的,三角支撑板2的三角突起部占据整体长度的30%,主要起到的作用为:一、在激光打击无效时,可以当作另一种冲撞的打击手段。二、可以更好的切割空气,诱导空气向两侧集中,加快总控模块的散热。
18.本实用新型的机身本体1为现有的机型,且整体采用3d打印技术,实现研发和制造成本降低,还可以反复使用的作用,整体的材质采用高柔性的聚乳酸材质,聚乳酸是由植物经过多道工序提炼出淀粉,经微生物发酵成乳酸,再聚合成聚乳酸,和传统的石油基塑料相比,聚乳酸材质更为安全、低碳、绿色。
19.请参阅图1,在本实用新型的另一种实施例中,本实用新型能够安装的设备数量和种类不做限制,将会在以下列举优选的方案。
20.方案一:
21.所述设备安装组件包括物理打击装置固定座3,所述物理打击装置固定座3安装在三角支撑板2三角突起部的上方,且三角支撑板2与物理打击装置固定座3的连接处设有用于安装打击装置的安装孔。
22.方案二:
23.所述设备安装组件还包括摄像头固定座4,所述摄像头固定座4位于三角支撑板2的两个侧壁之间且高度高于物理打击装置固定座3高度。摄像头固定座4与三角支撑板2水平面的角度为35
°‑
55
°
,摄像头固定座4为图像传输系统中的准星,进行搭载的激光发射器和准星进行校准,提高其他设备工作的准确性。方案三:
24.所述设备安装组件还包括激光发射器固定座5,所述安装在三角支撑板2侧壁的顶
部,所述激光发射器固定座5安装高度高于摄像头固定座4。激光发射器固定座5与三角支撑板2的水平面之间的角度在15
°‑
45
°
的范围内,激光发射器固定座5的安装孔位直径为2mm
‑
3mm。
25.综上,本实用新型的特点为:
26.1、通过摄像头固定座4的实时回传的图像信息中,可以确定该“低慢小”的违法飞行器的基本种类和特征,并存做证据。
27.2、在对其进行打击拦截时,我方可以根据不同情况选择对应战略;
28.情况a:违法飞行器被打击后发生坠落或迫降,我方载机还具有�行能力。可以在打击拦截任务完成后的飞行中通过摄像头固定座4观察其坠落地区,引导地面人员迅速找到该飞行器。
29.情况b:我方载机在打击该违法飞行器后一同坠落或迫降。可以根据我方载机上的gps信标,引导地面警力迅速达到准确地区。违法飞行器被打击后发生坠落或迫降违法飞行器被打击后发生坠落或迫降。
30.本实用新型使用到的标准零件均可以从市场上购买,异形件根据说明书的和附图的记载均可以进行订制,各个零件的具体连接方式均采用现有技术中成熟的螺栓、铆钉、焊接等常规手段,机械、零件和设备均采用现有技术中,常规的型号,加上电路连接采用现有技术中常规的连接方式,在此不再详述。
31.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。
32.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。