1.本实用新型属于无人机设备领域,特别涉及一种防撞型无人机。
背景技术:
2.无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作,与有人驾驶飞机相比,无人机往往更适合那些太“愚钝,肮脏或危险”的任务,无人机按应用领域,可分为军用与民用,军用方面,无人机分为侦察机和靶机,民用方面,无人机+行业应用,是无人机真正的刚需;目前在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域的应用,大大的拓展了无人机本身的用途,发达国家也在积极扩展行业应用与发展无人机技术;现有的无人机在工作时易受到碰撞,降低无人机的使用寿命,同时也影响无人机的正常工作,以此,亟需一种防撞型无人机来解决以上的问题。
技术实现要素:
3.针对现有技术存在的不足,本实用新型目的是提供一种防撞型无人机,解决上述背景技术中提出的问题。
4.本实用新型通过以下的技术方案实现:一种防撞型无人机,包括:支撑腿、固定杆、固定座、防撞机构、螺旋桨以及机体,所述支撑腿分别安装在机体下表面左侧、右侧,所述支撑腿包括支腿杆一、支腿杆二以及加强杆,所述支腿杆一、支腿杆二均包括橡胶防护套、支撑底端、伸缩杆、限位块、弹簧以及伸缩筒,所述伸缩筒上端与机体连接,所述伸缩腔开设在伸缩筒下端内部,所述伸缩腔内壁设有限位槽,所述弹簧安装在伸缩腔内部,所述伸缩腔下端活动安装有伸缩杆,所述限位块分别设置在伸缩杆上端左侧、右侧,所述限位块活动安装在限位槽内,所述伸缩杆上端与弹簧下端连接,所述支撑底端设置在伸缩杆下端,所述支撑底端表面安装有橡胶防护套;
5.所述固定杆分别设置在机体左侧、右侧,所述固定杆远离机体一端设有固定座,所述防撞机构设置在固定座远离固定杆的一侧,所述固定座上端安装螺旋桨,所述防撞机构包括防撞橡胶条、支撑杆一和支撑杆二。
6.作为一优选的实施方式,所述支撑腿设有两个,且两个所述支撑腿轴对称安装在机体下表面左侧、右侧,所述支腿杆一与支腿杆二规格相同,所述加强杆设置在支腿杆一与支腿杆二之间下端。
7.作为一优选的实施方式,所述伸缩筒内壁下侧轴对称设置有限位槽,所述限位槽与伸缩腔内部连通。
8.作为一优选的实施方式,所述加强杆设有两个,且两个所述加强杆均为中空金属管,所述支撑底端为一种金属球面块。
9.作为一优选的实施方式,所述固定杆设有四个,且四个所述固定杆分别轴对称设
置在机体左侧前端、后端和机体右侧前端、后端,所述固定座设有四个,驱动电机安装在所述固定座内部。
10.作为一优选的实施方式,所述防撞机构设有四个,弧杆设置在所述防撞机构远离固定座的一端,橡胶防护套安装在所述弧杆外侧表面,所述支撑杆一设置在弧杆前侧端、后侧端,所述支撑杆二设置在弧杆内侧中间,所述弧杆为一种碳钎维杆,所述支撑杆一、支撑杆二为一种弹性碳钎维杆。
11.采用了上述技术方案后,本实用新型的有益效果是:通过设置防撞机构,使得无人机的螺旋桨在飞行以及起降的时候,一旦与其他物体相碰撞时,防撞机构代替螺旋桨先于外界物体发生碰撞,避免无人机的螺旋桨与外界物体接触,保护螺旋桨,防止无人机坠毁,支撑腿的设计,使得无人机在降落时,避免无人机与地面接触时,地面给无人机的反作用力对无人机造成损害,抵消或者减弱地面的反作用力,延长无人机的使用寿命。
附图说明
12.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
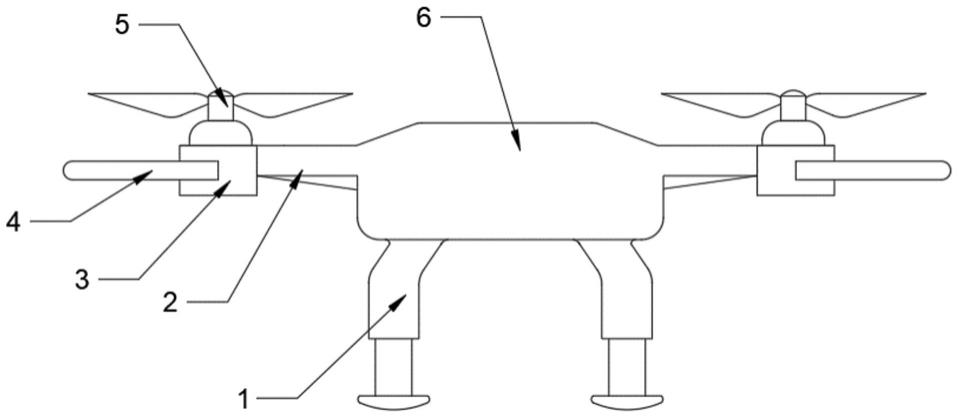
13.图1为本实用新型一种防撞型无人机的整体结构示意图。
14.图2为本实用新型一种防撞型无人机的支撑腿的示意图。
15.图3为本实用新型一种防撞型无人机的防撞机构的示意图。
16.图4为本实用新型一种防撞型无人机的伸缩杆与伸缩筒连接的示意图。
17.图中,1-支撑腿、2-固定杆、3-固定座、4-防撞机构、5-螺旋桨、6-机体、7-橡胶防护套、8-支撑底端、9-伸缩杆、10-伸缩筒、11-支腿杆一、12
‑ꢀ
加强杆、13-支腿杆二、14-防撞橡胶条、15-支撑杆一、16-支撑杆二、17-伸缩腔、18-限位槽、19-限位块、20-弹簧。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
19.请参阅图1至图4,本实用新型提供一种技术方案:一种防撞型无人机,包括:支撑腿1、固定杆2、固定座3、防撞机构4、螺旋桨5以及机体6,支撑腿1分别安装在机体6下表面左侧、右侧,支撑腿1包括支腿杆一11、支腿杆二13以及加强杆12,支腿杆一11、支腿杆二13均包括橡胶防护套7、支撑底端8、伸缩杆9、限位块19、弹簧20以及伸缩筒10,伸缩筒10上端与机体6连接,伸缩腔17开设在伸缩筒10下端内部,伸缩腔17内壁设有限位槽18,弹簧20安装在伸缩腔17内部,伸缩腔17下端活动安装有伸缩杆9,限位块19分别设置在伸缩杆9上端左侧、右侧,限位块19活动安装在限位槽18内,伸缩杆9上端与弹簧20下端连接,支撑底端8设置在伸缩杆9下端,支撑底端8表面安装有橡胶防护套7;
20.固定杆2分别设置在机体6左侧、右侧,固定杆2远离机体6一端设有固定座3,防撞
机构4设置在固定座3远离固定杆2的一侧,固定座3上端安装螺旋桨5,防撞机构4包括防撞橡胶条14、支撑杆一15和支撑杆二16。
21.支撑腿1设有两个,且两个支撑腿1轴对称安装在机体6下表面左侧、右侧,支腿杆一11与支腿杆二13规格相同,加强杆12设置在支腿杆一11 与支腿杆二13之间下端,加强杆12提升支腿杆一11与支腿杆二13之间的稳定性。
22.伸缩筒10内壁下侧轴对称设置有限位槽18,限位槽18与伸缩腔17内部连通,便于安装限位块19,配合限位块19对伸缩杆9进行限位。
23.加强杆12设有两个,且两个加强杆12均为中空金属管,支撑底端8为一种金属球面块,中空的加强杆12降低了无人机的总体质量。
24.固定杆2设有四个,且四个固定杆2分别轴对称设置在机体6左侧前端、后端和机体6右侧前端、后端,固定座3设有四个,驱动电机安装在固定座3 内部,用于安装防撞机构4。
25.防撞机构4设有四个,弧杆设置在防撞机构4远离固定座3的一端,橡胶防护套7安装在弧杆外侧表面,支撑杆一15设置在弧杆前侧端、后侧端,支撑杆二16设置在弧杆内侧中间,弧杆为一种碳钎维杆,支撑杆一15、支撑杆二16为一种弹性碳钎维杆,利用弧杆、支撑杆一15、支撑杆二16以及橡胶防护套7的弹性变形来吸能缓冲,保护无人机的螺旋桨5。
26.作为本实用新型的一个实施例:当无人机在飞行以及起降的时候,一旦与其他物体相碰撞时,防撞机构4代替螺旋桨5先于外界物体发生碰撞,弧杆、橡胶防护套7与外界物体接触时,弧杆与橡胶防护套7配合支撑杆一15、支撑杆二16发生弹性形变,利用弧杆、支撑杆一15、支撑杆二16以及橡胶防护套7的弹性变形来吸能缓冲,避免无人机的螺旋桨5与外界物体接触,保护螺旋桨5,防止无人机失去动力而坠毁,支撑腿1使得无人机在降落时,避免无人机与地面接触时,地面给无人机的反作用力对无人机造成损害,伸缩杆9利用弹簧20与伸缩筒10之间的缓冲抵消或者减弱地面的反作用力,延长无人机的使用寿命。
27.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。