1.本实用新型涉及无人机技术领域,具体为一种新型双叶片快拆式无人机旋翼。
背景技术:
2.无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。与有人驾驶飞机相比,无人机往往更适合那些太“愚钝,肮脏或危险”的任务。无人机按应用领域,可分为军用与民用。军用方面,无人机分为侦察机和靶机。民用方面,无人机+行业应用,是无人机真正的刚需;目前在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域的应用,大大的拓展了无人机本身的用途,发达国家也在积极扩展行业应用与发展无人机技术。
3.而目前市面上的无人机旋翼与无人机转动马达的输出端为固定连接,因此在无人机旋翼出现损坏时,操作人员需要将无人机旋翼连同马达一起进行拆卸,较为麻烦。
技术实现要素:
4.本实用新型的目的在于提供一种新型双叶片快拆式无人机旋翼,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种新型双叶片快拆式无人机旋翼,包括信号接收器、连接杆、固定板和固定壳,所述连接杆固定连接于信号接收器的外壁,所述固定板固定连接于连接杆远离信号接收器的一端,所述固定壳固定连接于固定板远离连接杆的一侧,所述固定壳的顶部设置有拆装组件。
6.所述拆装组件包括传动杆、竖杆、卡块、套环、卡槽、旋翼、螺纹柱和固定螺母,所述传动杆设置于固定壳的上方,所述竖杆固定连接于传动杆的顶端,所述卡块固定连接于竖杆的外壁,所述套环套设于竖杆的外壁,所述卡槽开设于套环的内壁,所述旋翼固定连接于套环的外壁,所述螺纹柱固定连接于竖杆的顶端,所述固定螺母套设于螺纹柱的外壁。
7.优选的,所述信号接收器与外部控制器信号连接,可以通过外部控制器对信号接收器发送指令信号,所述连接杆分布于信号接收器的外壁左右两侧。
8.优选的,所述卡块等间距分布于竖杆的外壁,所述卡槽与卡块卡接,套环通过卡槽与竖杆固定连接,所述旋翼分布于套环外壁的左右两侧,所述固定螺母与螺纹柱螺纹连接,所述固定螺母为自锁螺母,可以避免飞行振动时,导致固定螺母与螺纹柱之间发生脱离的现象。
9.优选的,所述固定壳的内部设置有转动组件,所述转动组件包括马达和转杆,所述马达固定连接于固定壳的内壁底部,所述转杆固定连接于马达的顶部输出端。
10.优选的,所述马达与信号接收器信号连接,操作人员可以通过外部控制器完成马达的开启或关闭,所述转杆远离马达的一端与传动杆的底端固定连接,马达通过转杆带动传动杆进行旋转。
11.优选的,所述信号接收器的底部和固定板的底部均设置有缓冲组件,所述缓冲组件包括连接外壳、连接弹簧、滑块、支撑杆、防滑板、立柱、支撑外壳、压板和支撑腿,所述连接外壳固定连接于固定板的底部,所述连接弹簧固定连接于连接外壳的内壁顶部,所述滑块设置于连接外壳的内部,所述支撑杆固定连接于滑块的底部,并贯穿连接外壳的内部,所述防滑板固定连接于支撑杆的底端,所述立柱固定连接于信号接收器的底部,所述支撑外壳设置于信号接收器的下方,所述压板固定连接于立柱的底端,所述支撑腿固定连接于支撑外壳的底部左右两侧。
12.优选的,所述滑块的外壁与连接外壳的内壁滑动连接,滑块可以在连接外壳的内部进行移动,所述连接弹簧远离连接外壳的一侧与滑块的顶部固定连接。
13.与现有技术相比,本实用新型的有益效果是:
14.1、该新型双叶片快拆式无人机旋翼,操作人员通过使用器械旋转固定螺母,使固定螺母与螺纹柱分离,此时操作人员便可以通过拉起的方式,使卡槽与卡块之间分离,当卡槽与卡块之间分离后,操作人员便完成旋翼与马达之间的分离,操作简单方便。
15.2、该新型双叶片快拆式无人机旋翼,无人机在下降时,防滑板和支撑腿会率先与地面或承载物体接触,此时滑块会对连接弹簧进行挤压,支撑腿与地面接触后,压板会对支撑外壳内的空气进行挤压,从而进行卸力,可以避免无人机降落时,由于冲击力过大,导致无人机内部的电子元件出现移位或损伤的情况出现。
附图说明
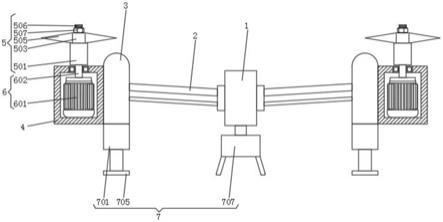
16.图1为本实用新型整体结构正面局部剖视图;
17.图2为本实用新型传动杆结构顶部示意图;
18.图3为本实用新型连接外壳结构正面剖视图;
19.图4为本实用新型支撑外壳结构正面局部剖视图。
20.图中:1、信号接收器;2、连接杆;3、固定板;4、固定壳;5、拆装组件;501、传动杆;508、竖杆;502、卡块;503、套环;504、卡槽;505、旋翼;506、螺纹柱;507、固定螺母;6、转动组件;601、马达;602、转杆;7、缓冲组件;701、连接外壳;702、连接弹簧;703、滑块;704、支撑杆;705、防滑板;706、立柱;707、支撑外壳;708、压板;709、支撑腿。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.请参阅图1-4,本实用新型提供一种技术方案:一种新型双叶片快拆式无人机旋翼,包括信号接收器1、连接杆2、固定板3和固定壳4,信号接收器1与外部控制器信号连接,可以通过外部控制器对信号接收器1发送指令信号,连接杆2固定连接于信号接收器1的外壁,连接杆2分布于信号接收器1的外壁左右两侧,固定板3固定连接于连接杆2远离信号接收器1的一端,固定壳4固定连接于固定板3远离连接杆2的一侧,固定壳4的顶部设置有拆装组件5,固定壳4的内部设置有转动组件6,信号接收器1的底部和固定板3的底部均设置有缓
冲组件7。
23.拆装组件5包括传动杆501、竖杆508、卡块502、套环503、卡槽504、旋翼505、螺纹柱506和固定螺母507,传动杆501设置于固定壳4的上方,竖杆508固定连接于传动杆501的顶端,卡块502固定连接于竖杆508的外壁,卡块502等间距分布于竖杆508的外壁,套环503套设于竖杆508的外壁,卡槽504开设于套环503的内壁,卡槽504与卡块502卡接,套环503通过卡槽504与竖杆508固定连接,旋翼505固定连接于套环503的外壁,旋翼505分布于套环503外壁的左右两侧,螺纹柱506固定连接于竖杆508的顶端,固定螺母507套设于螺纹柱506的外壁,固定螺母507与螺纹柱506螺纹连接,固定螺母507为自锁螺母,可以避免飞行振动时,导致固定螺母507与螺纹柱506之间发生脱离的现象,操作人员通过使用器械旋转固定螺母507,使固定螺母507与螺纹柱506分离,此时操作人员便可以通过拉起的方式,使卡槽504与卡块502之间分离,当卡槽504与卡块502之间分离后,操作人员便完成旋翼505与马达601之间的分离,操作简单方便。
24.转动组件6包括马达601和转杆602,马达601固定连接于固定壳4的内壁底部,马达601与信号接收器1信号连接,操作人员可以通过外部控制器完成马达601的开启或关闭,转杆602固定连接于马达601的顶部输出端,转杆602远离马达601的一端与传动杆501的底端固定连接,马达601通过转杆602带动传动杆501进行旋转。
25.缓冲组件7包括连接外壳701、连接弹簧702、滑块703、支撑杆704、防滑板705、立柱706、支撑外壳707、压板708和支撑腿709,连接外壳701固定连接于固定板3的底部,连接弹簧702固定连接于连接外壳701的内壁顶部,滑块703设置于连接外壳701的内部,滑块703的外壁与连接外壳701的内壁滑动连接,滑块703可以在连接外壳701的内部进行移动,连接弹簧702远离连接外壳701的一侧与滑块703的顶部固定连接,支撑杆704固定连接于滑块703的底部,并贯穿连接外壳701的内部,防滑板705固定连接于支撑杆704的底端,立柱706固定连接于信号接收器1的底部,支撑外壳707设置于信号接收器1的下方,压板708固定连接于立柱706的底端,支撑腿709固定连接于支撑外壳707的底部左右两侧,无人机在下降时,防滑板705和支撑腿709会率先与地面或承载物体接触,此时滑块703会对连接弹簧702进行挤压,支撑腿709与地面接触后,压板708会对支撑外壳707内的空气进行挤压,从而进行卸力,可以避免无人机降落时,由于冲击力过大,导致无人机内部的电子元件出现移位或损伤的情况出现。
26.在拆卸时,操作人员通过使用器械旋转固定螺母507,使固定螺母507与螺纹柱506分离,此时操作人员便可以通过拉起的方式,使卡槽504与卡块502之间分离,当卡槽504与卡块502之间分离后,操作人员便完成旋翼505与马达601之间的分离,无人机在下降时,防滑板705和支撑腿709会率先与地面或承载物体接触,此时滑块703会对连接弹簧702进行挤压,进行卸力,而支撑腿709与地面接触后,压板708会在该无人机的整体重量的作用下对支撑外壳707内位于压板708下方的空气进行挤压,从而进行卸力。
27.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。