1.本发明涉及高空气球发放领域,具体涉及一种模块化高空气球发放系统及发放方法。
背景技术:
2.空飘气球是一种成本低、载重量大的高效浮空器,现有技术中,高空气球常规发放方法众多,例如公开号为cn1562702的中国发明专利公开的高空气球发放方法、公开号为cn104890851a的中国发明专利公开的一种临近空间气球系统安全发放方法、公开号为cn106005350a的中国发明专利申请公开的一种大型气球的放飞方法、公开号为cn108163179a的中国发明专利公开的一种临近空间浮空器发放方法及发放装置、公开号为cn111746774a的中国发明专利公开的一种高空气球发放系统和方法等,公开了多种不同的发放方法。
3.气球囊体材料为轻质薄膜,薄膜材料强度较低,抗穿刺、抗撕裂及耐揉搓性能较差,气球囊体在地面充气过程中为随机柔性体,受地面风场影响较大,一旦遭遇突风,将会对囊体造成损伤,直接影响实验的成败;同时,气球常规地面充气过程持续时间约2小时,整个过程中需要保持低风速(不大于3米/秒)对气象条件要求较高。为应对气球充气过程中的不确定影响,现有的气球发放流程中需要安排多个岗位,配套保障人员多,保障单位建制大。另外,平流层气球一般不配置主动力,飞行轨迹受高空风场制约,为提高气球的任务可达性,需根据执行任务时段的高空风场及任务区域,机动调整气球放飞地点。
技术实现要素:
4.本发明所要解决的技术问题在于:
5.现有技术中进行高空气球发放时,配套复杂、发放过程繁琐、对气象条件要求高以及气球易损伤的技术问题。
6.本发明是通过以下技术手段实现解决上述技术问题的:
7.一种模块化高空气球发放系统,包括吊舱支撑模块、球体束缚模块、球体防护模块、气球举升模块;
8.所述球体束缚模块、球体防护模块均设置在气球举升模块的活动部位上,所述气球举升模块的活动部位能够上下摆动以及绕竖直轴线转动;
9.所述球体束缚模块包括放线机构、锁定机构,放线机构、锁定机构分别位于球体防护模块的第一端和第二端,待发放的气球的下部置于球体防护模块上,气球的上部置于地面;
10.所述放线机构与气球下端连接,锁定机构能够锁定或者释放气球的中部;
11.气球的下端通过悬挂拉索连接有吊舱,所述吊舱置于吊舱支撑模块上;
12.所述气球举升模块能够举升球体束缚模块、球体防护模块以及气球,并举升至球体防护模块的第二端高于第一端的呈倾斜状态。
13.本发明中的模块化高空气球发放系统将放飞系统模块化,结构简洁,设计、加工、采购、改装容易,资源占用较少,经济性好;放飞系统模块化组合使用,发放系统易拆卸组装,模块化设备运输、架设便利快捷,快速反应能力强;气球充气后可实现自动化放飞,人为干预少;球体防护模块保护气球囊体在铺设及放飞时囊体安全;利用放线机构匀速放飞,减少球体与吊舱的冲击;锁定机构打开后,气球举升模块的活动部位即可放下,放线机构放线过程中,气球举升模块的活动部位基本可完全放平,有效避免气球放飞时与气球举升模块的活动部位发生意外碰撞,系统安全防护性好;实际应用时,可根据气球体积大小,调整气球在球体防护模块上的位置,以顺利实现发放气球,系统适应性好;气球放飞吊舱可根据实际情况增加减速伞、抛放无人机等,系统功能可扩展能力强。本发明中的模块化高空气球发放系统配套简单、发放过程简单、对气象条件要求较低、气球安全不易损伤。
14.优化的,所述吊舱支撑模块包括拖车,拖车上设置有辅助支撑,所述吊舱置于辅助支撑上。
15.拖车可根据实际需求灵活调整所处位置,以满足发放气球的要求,确保吊舱支撑模块活动的灵活性。
16.优化的,所述辅助支撑由泡沫材料制成。
17.泡沫材料能够有效避免碰撞引起设备损毁。
18.优化的,所述放线机构包括设置在气球举升模块活动部位上的绞盘电机,绞盘电机上绕有系留拉索,系留拉索与气球下端连接,绞盘电机能够释放或者回收系留拉索,并能够释放至系留拉索脱离绞盘电机。
19.释放气球时,可通过控制绞盘电机匀速释放系留拉索,直至完全释放系留拉索后,实现发放气球。
20.优化的,所述锁定机构包括设置在气球举升模块活动部位上的档杆驱动机构,档杆驱动机构的活动端连接有档杆,档杆驱动机构能够驱动档杆挡在气球中部上方实现锁定;
21.档杆驱动机构还能够驱动档杆从气球中部上方撤出实现释放。
22.实际应用时,将气球放置到球体防护模块后,可通过档杆驱动机构驱动档杆锁定,进而锁定气球,承担充气后气球静浮力,防止气球逃逸,以便后续发放操作。
23.优化的,所述球体防护模块包括设置在气球举升模块的活动部位上的若干个u形支架,u形支架内侧铺设防护衬布,防护衬布表面形成一u形的长槽,所述气球的下部置于长槽中。
24.所形成的u形的长槽能够为气球提供安全、可靠的放置空间,进而起到保护气球防止其遭到损坏的作用。
25.优化的,所述防护衬布由纤维织物制成。
26.优化的,所述气球举升模块包括举升车,举升车上设置有摆动举升臂;
27.所述球体束缚模块、球体防护模块均设置在摆动举升臂上。
28.摆动举升臂与举升车配合能够灵活调整其所处的位置,并能根据实际需求灵活调整球体束缚模块、球体防护模块、气球的方位,以配合实现顺利发放气球。
29.优化的,所述摆动举升臂能够伸缩。
30.将摆动举升臂设置成能够伸缩的,能够根据实际气球的规格灵活调整摆动举升臂
的长度,以便于承载不同气球,适应性较强。
31.本发明还公开一种采用上述模块化高空气球发放系统的发放方法,包括如下步骤:
32.s01、布置系统
33.根据地面风向,调整气球举升模块的位置,使球体防护模块的第二端朝向迎风方向,将吊舱支撑模块放置在球体防护模块第一端的地面上;
34.对气球的囊体抽真空,将气球的下部置于球体防护模块上,气球的上部置于球体防护模块第二端的地面上;
35.锁定机构锁定气球中部,将放线机构与气球下端连接,将吊舱置于吊舱支撑模块上;
36.s02、充气
37.向气球的囊体内部填充轻质浮升气体;
38.s03、举升调向
39.充气完毕后,气球举升模块的活动部位举升,根据地面风向变化情况,调整气球举升模块活动部位的位置,确保放飞方向始终处于顺风方向,同时调整吊舱支撑模块的摆放位置,保持吊舱在气球飞行轨迹下方;
40.s04、释放气球
41.气球放飞方向调整完毕后,打开锁定机构,气球处于竖直状态;
42.启动放线机构,匀速释放气球;同时,气球举升模块的活动部位开始放下;
43.s05、调整吊舱
44.放线机构释放气球时,气球囊体浮力逐步转移至吊舱上,此过程中根据地面风速、风向调整吊舱支撑模块位置,保证气球与吊舱位置处于竖直状态;同时,气球举升模块的活动部位持续放下;
45.s06、飞离地面
46.放线机构释放完毕,气球携带吊舱飞离地面;此时,气球举升模块的活动部位完全放下,将气球举升模块移动至远离吊舱运动路径。
47.采用本发明中的气球发放方法,其整体配套简单、发放过程简单、对气象条件要求较低,气球不易损伤。
48.本发明的优点在于:
49.1.本发明中的模块化高空气球发放系统将放飞系统模块化,结构简洁,设计、加工、采购、改装容易,资源占用较少,经济性好;放飞系统模块化组合使用,发放系统易拆卸组装,模块化设备运输、架设便利快捷,快速反应能力强;气球充气后可实现自动化放飞,人为干预少;球体防护模块保护气球囊体在铺设及放飞时囊体安全;利用放线机构匀速放飞,减少球体与吊舱的冲击;锁定机构打开后,气球举升模块的活动部位即可放下,放线机构放线过程中,气球举升模块的活动部位基本可完全放平,有效避免气球放飞时与气球举升模块的活动部位发生意外碰撞,系统安全防护性好;实际应用时,可根据气球体积大小,调整气球在球体防护模块上的位置,以顺利实现发放气球,系统适应性好;气球放飞吊舱可根据实际情况增加减速伞、抛放无人机等,系统功能可扩展能力强。本发明中的模块化高空气球发放系统配套简单、发放过程简单、对气象条件要求较低、气球安全不易损伤。
50.2.拖车可根据实际需求灵活调整所处位置,以满足发放气球的要求,确保吊舱支撑模块活动的灵活性。
51.3.泡沫材料能够有效避免碰撞引起设备损毁。
52.4.释放气球时,可通过控制绞盘电机匀速释放系留拉索,直至完全释放系留拉索后,实现发放气球。
53.5.实际应用时,将气球放置到球体防护模块后,可通过档杆驱动机构驱动档杆锁定,进而锁定气球,承担充气后气球静浮力,防止气球逃逸,以便后续发放操作。
54.6.所形成的u形的长槽能够为气球提供安全、可靠的放置空间,进而起到保护气球防止其遭到损坏的作用。
55.7.摆动举升臂与举升车配合能够灵活调整其所处的位置,并能根据实际需求灵活调整球体束缚模块、球体防护模块、气球的方位,以配合实现顺利发放气球。
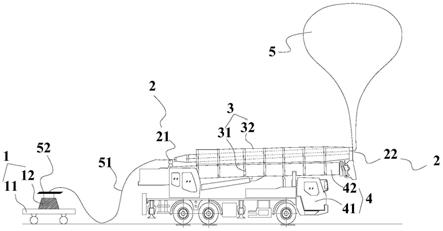
56.8.将摆动举升臂设置成能够伸缩的,能够根据实际气球的规格灵活调整摆动举升臂的长度,以便于承载不同气球,适应性较强。
57.9.采用本发明中的气球发放方法,其整体配套简单、发放过程简单、对气象条件要求较低,气球不易损伤。
附图说明
58.图1为本发明实施例中模块化高空气球发放系统的示意图;
59.图2为本发明实施例中高空气球发放过程示意图;
60.图3为本发明实施例中锁定机构的示意图(圆杆伸出);
61.图4为本发明实施例中锁定机构的示意图(圆杆缩回);
62.其中,
63.吊舱支撑模块
‑
1;拖车
‑
11;辅助支撑
‑
12;
64.球体束缚模块
‑
2;放线机构
‑
21;锁定机构
‑
22;推杆电机
‑
221;圆杆
‑
222;球体防护模块
‑
3;u形支架
‑
31;防护衬布
‑
32;
65.气球举升模块
‑
4;举升车
‑
41;摆动举升臂
‑
42;
66.气球
‑
5;悬挂拉索
‑
51;吊舱
‑
52;汇集环
‑
53。
具体实施方式
67.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
68.实施例一:
69.如图1所示,一种模块化高空气球发放系统,包括吊舱支撑模块1、球体束缚模块2、球体防护模块3、气球举升模块4。
70.所述球体束缚模块2、球体防护模块3均设置在气球举升模块4的活动部位上,所述气球举升模块4的活动部位能够上下摆动以及绕竖直轴线转动。所述球体束缚模块2包括放线机构21、锁定机构22,放线机构21、锁定机构22分别位于球体防护模块3的第一端和第二
端,待发放的气球5的下部置于球体防护模块3上,气球5的上部置于地面。所述放线机构21与气球5下端连接,锁定机构22能够锁定或者释放气球5的中部。
71.气球5的下端通过悬挂拉索51连接有吊舱52,所述吊舱52置于吊舱支撑模块1上;所述气球举升模块4能够举升球体束缚模块2、球体防护模块3以及气球5,并举升至球体防护模块3的第二端高于第一端的呈倾斜状态。
72.具体的,所述吊舱支撑模块1包括拖车11,拖车11为平板车结构,其底部设置四个万向轮,以便于移动,拖车11上设置有辅助支撑12,所述吊舱52置于辅助支撑12上。所述辅助支撑12由泡沫材料制成。辅助支撑12不限于特定形状,其能够支撑住吊舱52即可,本实施中,所述辅助支撑12呈圆台形结构。
73.所述放线机构21包括设置在气球举升模块4活动部位上的绞盘电机,绞盘电机上绕有系留拉索,系留拉索与气球5下端连接,绞盘电机能够释放或者回收系留拉索,并能够释放至系留拉索脱离绞盘电机。具体的,所述气球5的下端设置有汇集环53,汇集环53为环形,其与气球下端固定连接,系留拉索及悬挂拉索51均连接在汇集环53上。
74.所述锁定机构22包括设置在气球举升模块4活动部位上的档杆驱动机构,档杆驱动机构的活动端连接有档杆,档杆驱动机构能够驱动档杆挡在气球5中部上方实现锁定;档杆驱动机构还能够驱动档杆从气球5中部上方撤出实现释放。
75.所述球体防护模块3包括设置在气球举升模块4的活动部位上的若干个u形支架31,u形支架31内侧铺设防护衬布32,防护衬布32表面形成一u形的长槽,所述气球5的下部置于长槽中。所述防护衬布32由纤维织物制成。
76.具体的,所述档杆驱动机构包括设置在u形支架31第一侧的推杆电机221,档杆采用圆杆222,其同轴设置在推杆电机221的伸缩杆上,u形支架31的第二侧上设置有供圆杆222穿过的通孔311,圆杆222端部为球头,以便穿入通孔311,推杆电机221驱动圆杆222缩回,将气球5置于u形支架31中,推杆电机221驱动圆杆222伸出插入对面的通孔311中,进而实现气球的阻挡,防止气球逃逸,实际应用时,确保圆杆222表面光滑,必要时可在表面涂覆润滑剂,以避免气球升起缩回圆杆222时损伤气球表面。
77.所述气球举升模块4包括举升车41,举升车41上设置有摆动举升臂42;所述球体束缚模块2、球体防护模块3均设置在摆动举升臂42上。进一步的,所述摆动举升臂42能够伸缩。本实施例中,所述举升车41、摆动举升臂42可采用现有技术中的吊车,即气球举升模块4是在常规吊车基础上进行改造的,去除钢丝绳及吊钩,吊车的车体即所述举升车41,吊车的吊臂即所述摆动举升臂42,吊臂能够绕其转台转动,且能够实现伸缩。
78.本发明中的模块化高空气球发放系统将放飞系统模块化,结构简洁,设计、加工、采购、改装容易,资源占用较少,经济性好;放飞系统模块化组合使用,发放系统易拆卸组装,模块化设备运输、架设便利快捷,快速反应能力强;气球充气后可实现自动化放飞,人为干预少;球体防护模块3保护气球囊体在铺设及放飞时囊体安全;利用放线机构21匀速放飞,减少球体与吊舱的冲击;锁定机构22打开后,气球举升模块4的活动部位即可放下,放线机构21放线过程中,气球举升模块4的活动部位基本可完全放平,有效避免气球放飞时与气球举升模块4的活动部位发生意外碰撞,系统安全防护性好;实际应用时,可根据气球体积大小,调整气球在球体防护模块3上的位置,以顺利实现发放气球,系统适应性好;气球放飞吊舱可根据实际情况增加减速伞、抛放无人机等,系统功能可扩展能力强。本发明中的模块
化高空气球发放系统配套简单、发放过程简单、对气象条件要求较低、气球安全不易损伤。
79.拖车11可根据实际需求灵活调整所处位置,以满足发放气球的要求,确保吊舱支撑模块1活动的灵活性。泡沫材料能够有效避免碰撞引起设备损毁。释放气球时,可通过控制绞盘电机匀速释放系留拉索,直至完全释放系留拉索后,实现发放气球5。实际应用时,将气球放置到球体防护模块3后,可通过档杆驱动机构驱动档杆锁定,进而锁定气球,承担充气后气球静浮力,防止气球逃逸,以便后续发放操作。所形成的u形的长槽能够为气球提供安全、可靠的放置空间,进而起到保护气球防止其遭到损坏的作用。摆动举升臂42与举升车41配合能够灵活调整其所处的位置,并能根据实际需求灵活调整球体束缚模块2、球体防护模块3、气球5的方位,以配合实现顺利发放气球。将摆动举升臂42设置成能够伸缩的,能够根据实际气球5的规格灵活调整摆动举升臂42的长度,以便于承载不同气球5,适应性较强。
80.实施例二:
81.如图2所示,本实施例公开一种采用上述模块化高空气球发放系统的发放方法,包括如下步骤:
82.s01、布置系统
83.根据地面风向,调整气球举升模块4的位置,使球体防护模块3的第二端朝向迎风方向,将吊舱支撑模块1放置在球体防护模块3第一端的地面上;即吊车车头迎风,吊舱支撑模块1移动至车尾;
84.对气球5的囊体抽真空,将气球5的下部置于球体防护模块3上,气球5的上部置于球体防护模块3第二端的地面上;即,将抽气干瘪的气球放在吊臂上u形支架31、防护衬布32形成的u形的长槽中,气球5的上部置于车头地面;
85.锁定机构22锁定气球5中部,将放线机构21与气球5下端连接,将吊舱52置于吊舱支撑模块1上;即,推杆电机221驱动圆杆222伸出插入对面的通孔311中,进而实现气球的阻挡锁定,防止气球逃逸,将系留拉索及悬挂拉索51均连接在汇集环53上,吊舱52放在辅助支撑12上;
86.s02、充气
87.向气球5的囊体内部填充轻质浮升气体;随着气体的充入,气球浮起,系留拉索、锁定机构22受力;
88.s03、举升调向
89.充气完毕后,气球举升模块4的活动部位举升,即,吊臂升起,根据地面风向变化情况,调整气球举升模块4活动部位的位置,即调整吊臂的位置,确保放飞方向始终处于顺风方向,同时调整吊舱支撑模块1的摆放位置,保持吊舱52在气球5飞行轨迹下方;
90.s04、释放气球
91.气球5放飞方向调整完毕后,打开锁定机构22,即推杆电机221驱动圆杆222缩回,气球5处于竖直状态;
92.启动放线机构21,匀速释放气球5;同时,气球举升模块4的活动部位开始放下;即,绞盘电机运转匀速放线,吊臂下降;
93.s05、调整吊舱
94.放线机构21释放气球5时,气球5囊体浮力逐步转移至吊舱52上,此过程中根据地面风速、风向调整吊舱支撑模块1位置,保证气球5与吊舱52位置处于竖直状态;同时,气球
举升模块4的活动部位持续放下,即吊臂持续下降;
95.s06、飞离地面
96.放线机构21释放完毕,即系留拉索脱离绞盘电机,气球5携带吊舱52飞离地面;此时,气球举升模块4的活动部位完全放下,即吊臂下降到位,将气球举升模块4移动至远离吊舱52运动路径,即将吊车开离至远离吊舱52运动路径。
97.采用本发明中的气球发放方法,其整体配套简单、发放过程简单、对气象条件要求较低,气球不易损伤。
98.以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。