一种无人机机载ai吊舱
技术领域
1.本实用涉及无人机吊舱技术领域,具体为一种无人机机载ai吊舱。
背景技术:
2.无人驾驶飞机简称“无人机”(“uav”),是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器,无人机是无人驾驶飞行器的统称,且可以通过加装吊舱使飞机拥有其本身所不具备的功能。
3.现有的无人机大多质量较轻,其在四级以上的风力中稳定性显得较差,然而无人机飞行首先要保证的就是稳定性,使得现有的无人机无法在风力较为强劲的情况下的保持正常飞行,大大增加了无人机的局限性,同时现有的无人机多为遥感操控,属于使用者使用遥控器进行操纵,然而人眼视距有限且难免有分心的时候,使得操控无人机对于一些使用者而言,属于较为危险的行为。
4.所以,如何设计一种无人机机载ai吊舱,成为我们当前需要解决的问题。
技术实现要素:
5.本实用新型的目的在于提供一种无人机机载ai吊舱,以解决上述背景技术中提出的现有无人机在风中的稳定性较差,单纯的人工操控无人机无法保证安全性等问题。
6.为实现上述目的,本实用新型提供如下技术方案:一种无人机机载ai吊舱,包括主体架、连接座和电机罩,所述主体架的左侧固定连接有连接座,所述连接座的左侧固定连接有风速传感器,所述主体架的底部固定连接有控制器,所述控制器的前面固定连接有伸缩电机,所述伸缩电机的前面活动连接有伸缩杆,所述伸缩杆的前面固定连接有调重块,所述调重块的左侧固定连接有液压杆,所述液压杆的左端固定连接有液压缸,所述液压杆的外壁固定连接有压缩弹簧,所述调重块的底部固定连接有电机罩,所述电机罩的内部固定连接有步进电机,所述步进电机的底部活动连接有旋转杆,所述旋转杆的底端固定连接有拍摄探头,所述步进电机的左侧固定连接有记忆卡,所述记忆卡的左侧固定连接有单片机,所述步进电机的右侧固定连接有无线发射器,所述无线发射器的右侧固定连接有探测雷达,所述主体架的顶部固定连接有机体。
7.优选的,所述调重块的底部右侧固定连接有橡胶固定座。
8.优选的,所述电机罩的外壁固定连接有防锈漆。
9.优选的,所述橡胶固定座的底部固定连接有照明灯。
10.优选的,所述主体架左侧的连接座,连接座左侧的风速传感器,主体架底部的控制器,控制器前面的伸缩电机,伸缩电机前面的伸缩杆,伸缩杆前面的调重块,调重块左侧的液压杆,液压杆左端的液压缸和液压杆外壁的压缩弹簧共同组成调重机构。
11.优选的,所述调重块底部的电机罩,电机罩内部的步进电机,步进电机底部的旋转杆,旋转杆底端的拍摄探头,步进电机左侧的记忆卡,记忆卡左侧的单片机,步进电机右侧的无线发射器和无线发射器右侧的探测雷达共同组成探测机构。
12.与现有技术相比,本实用新型的有益效果是:
13.1.该种无人机机载ai吊舱,通过设置调重机构,风速传感器可将预警风力信号以及风力风向等数据传输给控制器,继而通过控制器下达指令,使得液压缸开启带动液压杆伸缩,且可以控制伸缩电机开启,使得伸缩杆进行伸缩,使得无人机的重心偏向强风吹袭的方向,可通过改变自身重心的方式对强风风能进行抵消,使得无人机在较强的风中也能保持稳定;
14.2.该种无人机机载ai吊舱,通过设置探测机构,启动探测雷达,使得探测雷达向四周发射电磁波,再接受反射回来的电磁波,进而通过接受反射电磁波的时间以及方位对周围障碍物进行判断,再将数据反馈给单片机并做出躲避反应,同时通过无线发射器向使用者的终端设备发出警报提示,可自行闪避,避免使用者操控失误导致误伤人群。
附图说明
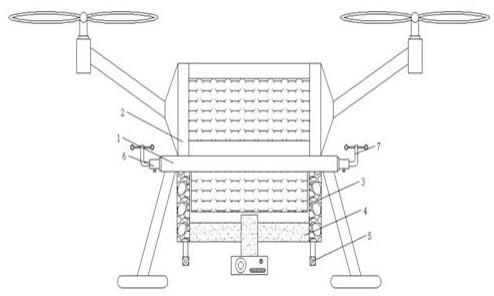
15.图1为本实用新型装置主体的整体结构示意图;
16.图2为本实用新型调重机构的结构示意图;
17.图3为本实用新型探测机构的结构示意图;
18.图4为本实用新型的连接座的结构示意图。
19.图中:1、主体架;2、机体;3、橡胶固定座;4、防锈漆;5、照明灯;6、连接座;7、风速传感器;8、控制器;9、伸缩电机;10、伸缩杆;11、调重块;12、液压杆;13、液压缸;14、压缩弹簧;15、电机罩;16、步进电机;17、旋转杆;18、拍摄探头;19、记忆卡;20、单片机;21、无线发射器;22、探测雷达。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例,基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
22.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量,由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征,在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
23.请参阅图1
‑
4,本实用新型提供技术方案:一种无人机机载ai吊舱,包括主体架1、连接座6和电机罩15,主体架1的左侧固定连接有连接座6,连接座6的左侧固定连接有风速传感器7,主体架1的底部固定连接有控制器8,控制器8的前面固定连接有伸缩电机9,伸缩电机9的前面活动连接有伸缩杆10,伸缩杆10的前面固定连接有调重块11,调重块11的左侧
固定连接有液压杆12,液压杆12的左端固定连接有液压缸13,液压杆12的外壁固定连接有压缩弹簧14,调重块11的底部固定连接有电机罩15,电机罩15的内部固定连接有步进电机16,步进电机16的底部活动连接有旋转杆17,旋转杆17的底端固定连接有拍摄探头18,步进电机16的左侧固定连接有记忆卡19,记忆卡19的左侧固定连接有单片机20,步进电机16的右侧固定连接有无线发射器21,无线发射器21的右侧固定连接有探测雷达22,主体架1的顶部固定连接有机体2。
24.优选的,调重块11的底部右侧固定连接有橡胶固定座3,现有的无人机吊舱内部大多装有较为精密的仪器,且仪器较为脆弱容易因撞击震动损坏,通过设置橡胶固定座3,使用橡胶固定座3对组件进行相连,由于橡胶固定座3具有一定的弹性,当受到震动时橡胶固定座3即可发生形变从而吸收部分震动,即可减缓内部组件所受到的震动,减小了内部组件因震动而损坏的可能性,提高了装置的实用性。
25.优选的,电机罩15的外壁固定连接有防锈漆4,现有的无人机外部组件多为金属制成,由于室外环境复杂,时常受到风吹雨淋,极易金属组件生锈,通过设置防锈漆4,将防锈漆4涂在金属组件的外壁,当防锈漆4风干后即可在金属组件外壁形成一层致密的漆膜,该漆膜性质稳定,不与空气和水发生反应,同时可对金属组件进行包覆,从而了减小金属组件被水和空气锈蚀的可能性,提高了装置的实用性。
26.优选的,橡胶固定座3的底部固定连接有照明灯5,现有的无人机多在白天进行拍摄,然而当遇到光线不足时,则难以将画面清晰的拍下,通过设置照明灯5,将照明灯5设置在拍摄探头18的两侧,当拍摄光线不足时,即可开启照明灯5,使得照明灯5为拍摄提供光线,从而避免因光线不足而导致拍摄画面模糊,提高了装置的实用性。
27.优选的,主体架1左侧的连接座6,连接座6左侧的风速传感器7,主体架1底部的控制器8,控制器8前面的伸缩电机9,伸缩电机9前面的伸缩杆10,伸缩杆10前面的调重块11,调重块11左侧的液压杆12,液压杆12左端的液压缸13和液压杆12外壁的压缩弹簧14共同组成调重机构,现有的无人机大多质量较轻,其在四级以上的风力中稳定性显得较差,然而无人机飞行首先要保证的就是稳定性,使得现有的无人机无法在风力较为强劲的情况下的保持正常飞行,大大增加了无人机的局限性,通过设置调重机构,使用风速传感器7对风速以及风向进行侦测,同时将侦测数据传输至控制器8,当风力足以影响无人机正常飞行时,风速传感器7即可将预警风力信号以及风力风向等数据传输给控制器8,继而通过控制器8下达指令,使得液压缸13开启带动液压杆12伸缩,使得调重块11产生横向位置变化,且可以控制伸缩电机9开启,使得伸缩杆10进行伸缩,使得调重块11以及液压缸13产生纵向位置变化,改变了无人机的质量分配,使得无人机的重心偏向强风吹袭的方向,从而抵消强风风能,该机构可以通过改变自身重心的方式对强风风能进行抵消,使得无人机在较强的风中也能保持稳定,提高了装置的实用性。
28.优选的,调重块11底部的电机罩15,电机罩15内部的步进电机16,步进电机16底部的旋转杆17,旋转杆17底端的拍摄探头18,步进电机16左侧的记忆卡19,记忆卡19左侧的单片机20,步进电机16右侧的无线发射器21和无线发射器21右侧的探测雷达22共同组成探测机构,现有的无人机多为遥感操控,属于使用者使用遥控器进行操纵,然而人眼视距有限且难免有分心的时候,使得操控无人机对于一些使用者而言,属于较为危险的行为,通过设置探测机构,使用者在操控无人机进行拍摄时,可开启步进电机16带动旋转杆17进行旋转,由
于旋转杆17与拍摄探头18固定连接,即可使得拍摄探头18进行旋转拍摄,同时将拍摄画面传输至单片机20,在通过单片机20控制无线发射器21将画面同步至使用者的终端设备,同时将画面备份至记忆卡19内,且可以开启自动巡航模式,以自动巡航模式下的躲避为优先级,即启动探测雷达22,使得探测雷达22向四周发射电磁波,再接受反射回来的电磁波,进而通过接受反射电磁波的时间以及方位对周围障碍物进行判断,再将数据反馈给单片机20并做出躲避反应,同时通过无线发射器21向使用者的终端设备发出警报提示,该机构可以使摄像头进行多角度拍摄,提高了装置的实用性,同时可以自行闪避,避免使用者操控失误导致误伤人群,提高了装置的实用性。
29.工作原理:首先,通过设置调重机构,使用风速传感器7对风速以及风向进行侦测,同时将侦测数据传输至控制器8,当风力足以影响无人机正常飞行时,风速传感器7即可将预警风力信号以及风力风向等数据传输给控制器8,继而通过控制器8下达指令,使得液压缸13开启带动液压杆12伸缩,使得调重块11产生横向位置变化,且可以控制伸缩电机9开启,使得伸缩杆10进行伸缩,使得调重块11以及液压缸13产生纵向位置变化,改变了无人机的质量分配,使得无人机的重心偏向强风吹袭的方向,从而抵消强风风能,该机构可以通过改变自身重心的方式对强风风能进行抵消,使得无人机在较强的风中也能保持稳定,提高了装置的实用性;
30.然后,通过设置探测机构,使用者在操控无人机进行拍摄时,可开启步进电机16带动旋转杆17进行旋转,由于旋转杆17与拍摄探头18固定连接,即可使得拍摄探头18进行旋转拍摄,同时将拍摄画面传输至单片机20,在通过单片机20控制无线发射器21将画面同步至使用者的终端设备,同时将画面备份至记忆卡19内,且可以开启自动巡航模式,以自动巡航模式下的躲避为优先级,即启动探测雷达22,使得探测雷达22向四周发射电磁波,再接受反射回来的电磁波,进而通过接受反射电磁波的时间以及方位对周围障碍物进行判断,再将数据反馈给单片机20并做出躲避反应,同时通过无线发射器21向使用者的终端设备发出警报提示,该机构可以使摄像头进行多角度拍摄,提高了装置的实用性,同时可以自行闪避,避免使用者操控失误导致误伤人群,提高了装置的实用性;
31.接着,通过设置橡胶固定座3,使用橡胶固定座3对组件进行相连,由于橡胶固定座3具有一定的弹性,当受到震动时橡胶固定座3即可发生形变从而吸收部分震动,即可减缓内部组件所受到的震动,减小了内部组件因震动而损坏的可能性,提高了装置的实用性;
32.紧接着,通过设置防锈漆4,将防锈漆4涂在金属组件的外壁,当防锈漆4风干后即可在金属组件外壁形成一层致密的漆膜,该漆膜性质稳定,不与空气和水发生反应,同时可对金属组件进行包覆,从而了减小金属组件被水和空气锈蚀的可能性,提高了装置的实用性;
33.最后,通过设置照明灯5,将照明灯5设置在拍摄探头18的两侧,当拍摄光线不足时,即可开启照明灯5,使得照明灯5为拍摄提供光线,从而避免因光线不足而导致拍摄画面模糊,提高了装置的实用性,这就是该种无人机机载ai吊舱的工作原理。
34.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。